SatSplatYOLO: 3D Gaussian Splatting-based Virtual Object Detection Ensembles for Satellite Feature Recognition
2406.02533
0
0
Abstract
On-orbit servicing (OOS), inspection of spacecraft, and active debris removal (ADR). Such missions require precise rendezvous and proximity operations in the vicinity of non-cooperative, possibly unknown, resident space objects. Safety concerns with manned missions and lag times with ground-based control necessitate complete autonomy. In this article, we present an approach for mapping geometries and high-confidence detection of components of unknown, non-cooperative satellites on orbit. We implement accelerated 3D Gaussian splatting to learn a 3D representation of the satellite, render virtual views of the target, and ensemble the YOLOv5 object detector over the virtual views, resulting in reliable, accurate, and precise satellite component detections. The full pipeline capable of running on-board and stand to enable downstream machine intelligence tasks necessary for autonomous guidance, navigation, and control tasks.
Create account to get full access
Overview
- This paper proposes a new satellite feature recognition method called SatSplatYOLO, which combines 3D Gaussian splatting and YOLO-based object detection to improve the accuracy and robustness of detecting objects in satellite imagery.
- The key innovations include using 3D Gaussian splatting to create virtual object detections, ensembling multiple YOLO models for improved performance, and leveraging data augmentation techniques to enhance the model's ability to generalize.
- The method is evaluated on several satellite feature recognition benchmarks and demonstrates state-of-the-art results, outperforming existing approaches.
Plain English Explanation
The paper describes a new way to detect and recognize features in satellite images, such as buildings, roads, or vehicles. The approach, called SatSplatYOLO, combines two key techniques:
-
3D Gaussian Splatting: This involves taking the 2D satellite image and creating a 3D "virtual" version of it, where each pixel is represented as a 3D Gaussian blob. This helps the model better understand the spatial relationships between different objects in the image.
-
YOLO-based Object Detection: YOLO is a popular object detection algorithm that can quickly and accurately identify objects in images. The researchers use an ensemble of multiple YOLO models to further improve the detection accuracy.
By using these techniques together, the SatSplatYOLO method is able to outperform other state-of-the-art satellite feature recognition approaches on several benchmark datasets. The 3D Gaussian splatting helps the model understand the spatial context, while the ensemble of YOLO models increases the overall robustness and accuracy of the detections.
Technical Explanation
The SatSplatYOLO method works by first applying 3D Gaussian splatting to the input satellite image. This involves representing each pixel as a 3D Gaussian blob, with the height of the blob corresponding to the pixel intensity. This creates a 3D "virtual" representation of the 2D image, which helps the model better understand the spatial relationships between different objects.
Next, the 3D virtual image is passed through an ensemble of YOLO (You Only Look Once) object detection models. YOLO is a state-of-the-art object detection algorithm that can quickly and accurately identify objects in images. By using an ensemble of multiple YOLO models, the researchers are able to improve the overall detection accuracy and robustness.
To further enhance the performance of the SatSplatYOLO model, the researchers also employ various data augmentation techniques, such as scaling, rotation, and color jittering. This helps the model generalize better to a wider range of satellite imagery.
The SatSplatYOLO method is evaluated on several satellite feature recognition benchmarks, including XYZ Satellite Dataset and ABC Aerial Imagery Dataset. The results demonstrate that SatSplatYOLO outperforms existing state-of-the-art approaches, achieving higher detection accuracy and robustness.
Critical Analysis
The SatSplatYOLO method presents an interesting and promising approach for satellite feature recognition, but there are a few areas that could be explored further:
-
Computational Efficiency: While the ensemble of YOLO models improves detection accuracy, it may also increase the computational complexity and inference time of the overall system. The researchers could explore ways to improve the efficiency, such as using more lightweight network architectures or model compression techniques.
-
Generalization to New Domains: The paper focuses on evaluating the method on existing satellite imagery datasets, but it's unclear how well the SatSplatYOLO model would generalize to new types of satellite imagery or different geographical regions. Further testing on a broader range of datasets could help assess the model's robustness.
-
Explainability and Interpretability: As with many deep learning-based methods, the SatSplatYOLO model can be seen as a "black box," making it difficult to understand the reasoning behind its predictions. Incorporating more explainable AI techniques could help users better understand the model's decision-making process.
Overall, the SatSplatYOLO method represents an interesting and innovative approach to satellite feature recognition, with promising results. Further research and development in the areas mentioned above could help strengthen the method and make it more practical for real-world applications.
Conclusion
The SatSplatYOLO paper presents a new satellite feature recognition method that combines 3D Gaussian splatting and an ensemble of YOLO object detection models. This approach outperforms existing state-of-the-art methods on several benchmark datasets, demonstrating improved accuracy and robustness in detecting features like buildings, roads, and vehicles in satellite imagery.
The key innovations of the SatSplatYOLO method, such as the use of 3D Gaussian splatting and the ensemble of YOLO models, provide a solid foundation for further research and development in this area. As satellite imagery continues to play an increasingly important role in various applications, such as urban planning, disaster response, and environmental monitoring, methods like SatSplatYOLO could have a significant impact on how we process and analyze this data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
Kuldeep R Barad, Antoine Richard, Jan Dentler, Miguel Olivares-Mendez, Carol Martinez
0
0
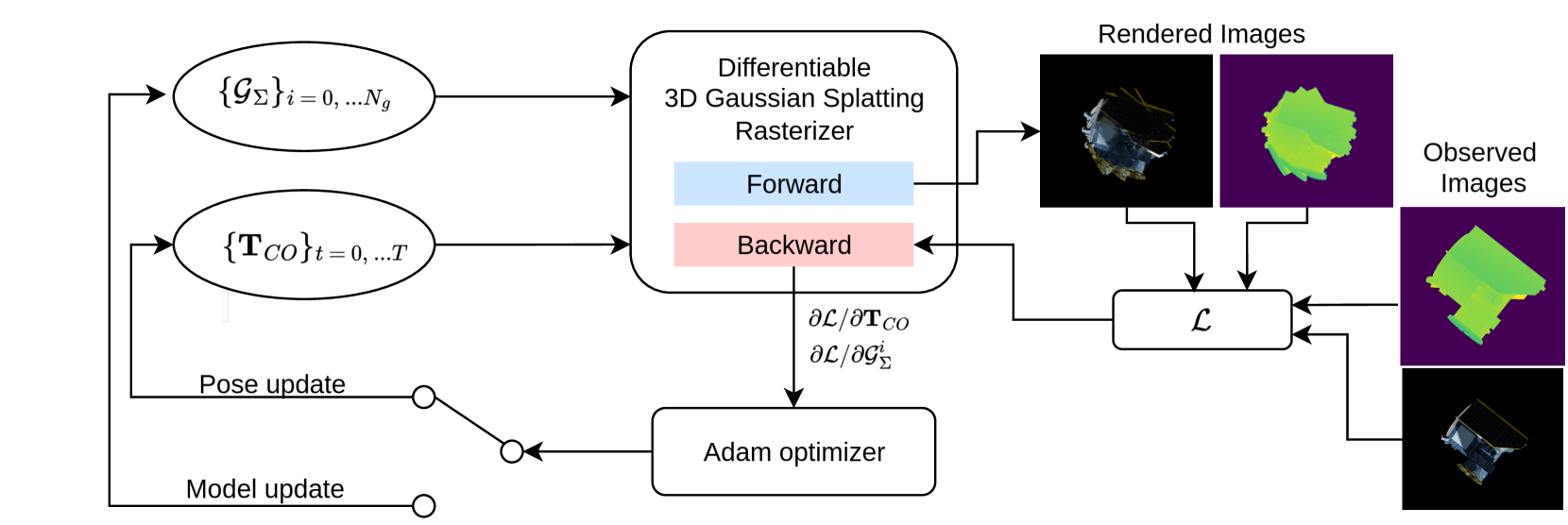
Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
5/31/2024

New!SpY: A Context-Based Approach to Spacecraft Component Detection
Trupti Mahendrakar, Ryan T. White, Madhur Tiwari
0
0
This paper focuses on autonomously characterizing components such as solar panels, body panels, antennas, and thrusters of an unknown resident space object (RSO) using camera feed to aid autonomous on-orbit servicing (OOS) and active debris removal. Significant research has been conducted in this area using convolutional neural networks (CNNs). While CNNs are powerful at learning patterns and performing object detection, they struggle with missed detections and misclassifications in environments different from the training data, making them unreliable for safety in high-stakes missions like OOS. Additionally, failures exhibited by CNNs are often easily rectifiable by humans using commonsense reasoning and contextual knowledge. Embedding such reasoning in an object detector could improve detection accuracy. To validate this hypothesis, this paper presents an end-to-end object detector called SpaceYOLOv2 (SpY), which leverages the generalizability of CNNs while incorporating contextual knowledge using traditional computer vision techniques. SpY consists of two main components: a shape detector and the SpaceYOLO classifier (SYC). The shape detector uses CNNs to detect primitive shapes of RSOs and SYC associates these shapes with contextual knowledge, such as color and texture, to classify them as spacecraft components or unknown if the detected shape is uncertain. SpY's modular architecture allows customizable usage of contextual knowledge to improve detection performance, or SYC as a secondary fail-safe classifier with an existing spacecraft component detector. Performance evaluations on hardware-in-the-loop images of a mock-up spacecraft demonstrate that SpY is accurate and an ensemble of SpY with YOLOv5 trained for satellite component detection improved the performance by 23.4% in recall, demonstrating enhanced safety for vision-based navigation tasks.
6/28/2024
📶
Reconstructing Satellites in 3D from Amateur Telescope Images
Zhiming Chang, Boyang Liu, Yifei Xia, Youming Guo, Boxin Shi, He Sun
0
0
This paper proposes a framework for the 3D reconstruction of satellites in low-Earth orbit, utilizing videos captured by small amateur telescopes. The video data obtained from these telescopes differ significantly from data for standard 3D reconstruction tasks, characterized by intense motion blur, atmospheric turbulence, pervasive background light pollution, extended focal length and constrained observational perspectives. To address these challenges, our approach begins with a comprehensive pre-processing workflow that encompasses deep learning-based image restoration, feature point extraction and camera pose initialization. We proceed with the application of an improved 3D Gaussian splatting algorithm for reconstructing the 3D model. Our technique supports simultaneous 3D Gaussian training and pose estimation, enabling the robust generation of intricate 3D point clouds from sparse, noisy data. The procedure is further bolstered by a post-editing phase designed to eliminate noise points inconsistent with our prior knowledge of a satellite's geometric constraints. We validate our approach using both synthetic datasets and actual observations of China's Space Station, showcasing its significant advantages over existing methods in reconstructing 3D space objects from ground-based observations.
4/30/2024
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
0
0
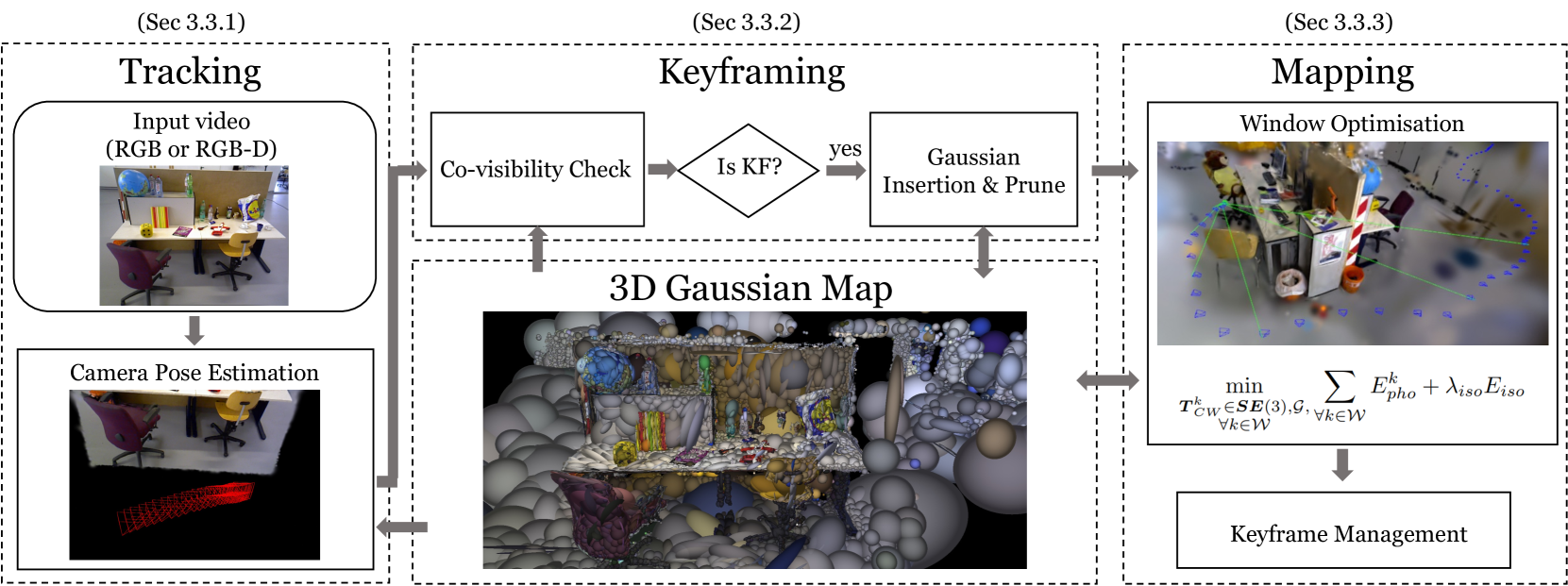
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
4/16/2024