Reconstructing Satellites in 3D from Amateur Telescope Images
2404.18394
0
0
📶
Abstract
This paper proposes a framework for the 3D reconstruction of satellites in low-Earth orbit, utilizing videos captured by small amateur telescopes. The video data obtained from these telescopes differ significantly from data for standard 3D reconstruction tasks, characterized by intense motion blur, atmospheric turbulence, pervasive background light pollution, extended focal length and constrained observational perspectives. To address these challenges, our approach begins with a comprehensive pre-processing workflow that encompasses deep learning-based image restoration, feature point extraction and camera pose initialization. We proceed with the application of an improved 3D Gaussian splatting algorithm for reconstructing the 3D model. Our technique supports simultaneous 3D Gaussian training and pose estimation, enabling the robust generation of intricate 3D point clouds from sparse, noisy data. The procedure is further bolstered by a post-editing phase designed to eliminate noise points inconsistent with our prior knowledge of a satellite's geometric constraints. We validate our approach using both synthetic datasets and actual observations of China's Space Station, showcasing its significant advantages over existing methods in reconstructing 3D space objects from ground-based observations.
Create account to get full access
Overview
- Proposes a framework for 3D reconstruction of satellites in low-Earth orbit using videos from small amateur telescopes
- Addresses challenges like motion blur, atmospheric turbulence, light pollution, and constrained observational perspectives
- Uses deep learning-based image restoration, feature extraction, and camera pose initialization as pre-processing steps
- Applies an improved 3D Gaussian splatting algorithm for 3D model reconstruction
- Includes a post-editing phase to remove noise points inconsistent with satellite geometry
- Validates the approach using synthetic data and real-world observations of China's Space Station
Plain English Explanation
This paper describes a new method for creating 3D models of satellites orbiting the Earth. The researchers used video footage captured by small, amateur-operated telescopes on the ground. However, this type of video data is very different from the typical data used for 3D reconstruction, as it has a lot of motion blur, atmospheric disturbances, background light pollution, and limited viewing angles.
To address these challenges, the researchers developed a multi-step process. First, they used deep learning techniques to clean up and enhance the video frames, identifying key features and initializing the camera positions. Then, they applied an improved 3D reconstruction algorithm called "Gaussian splatting" to build the 3D model of the satellite from the sparse, noisy data. This algorithm is similar to ones used in SLAM systems for 3D scene reconstruction.
Finally, the researchers had a post-processing step to remove any remaining noise points that didn't match the expected geometry of a satellite. They tested their approach using both computer-generated data and real-world observations of China's space station, showing that it outperformed existing methods for reconstructing 3D objects from ground-based telescope footage.
Technical Explanation
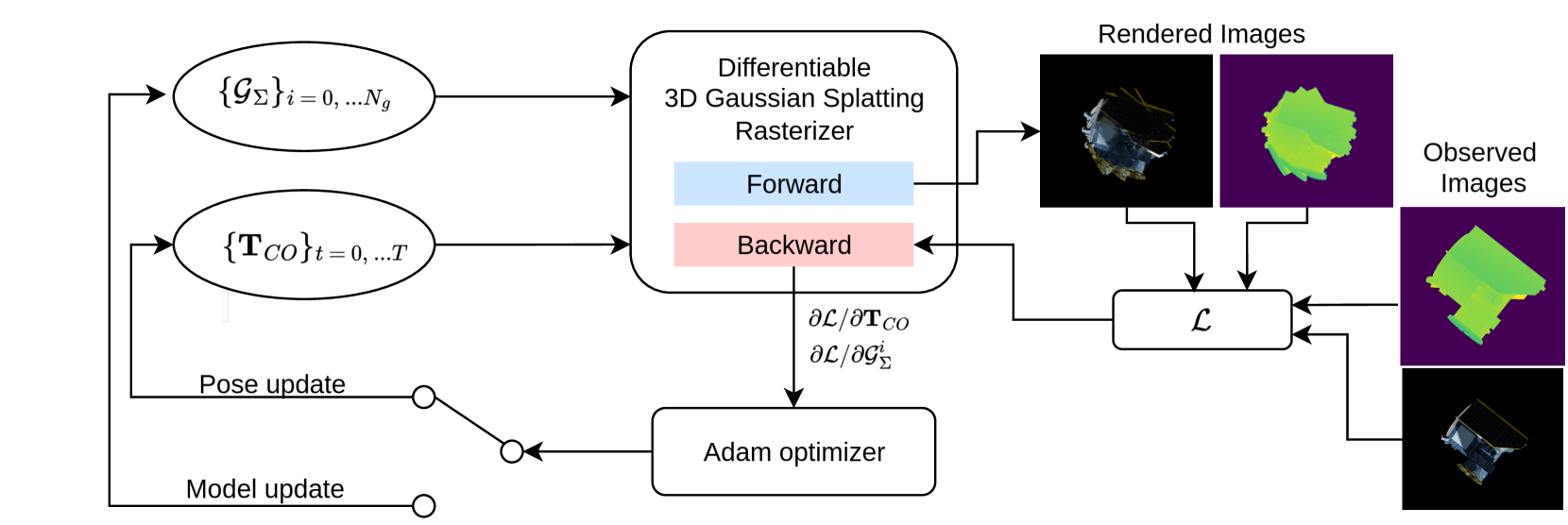
The core of the proposed framework is an improved 3D Gaussian splatting algorithm that can robustly reconstruct 3D point clouds from the sparse, noisy video data captured by small amateur telescopes. This algorithm is similar to the Gaussian splatting techniques used in SLAM systems for dense 3D scene reconstruction.
The process begins with a comprehensive pre-processing workflow. This includes deep learning-based image restoration to mitigate the effects of motion blur, atmospheric turbulence, and background light pollution. Feature point extraction and camera pose initialization are also performed to provide the initial inputs for the 3D reconstruction.
The 3D Gaussian splatting algorithm then operates by simultaneously updating the 3D Gaussian model parameters and estimating the camera poses. This allows it to generate detailed 3D point clouds from the sparse, noisy video data in a robust manner. Finally, a post-editing phase is applied to remove any noise points that are inconsistent with the known geometric constraints of a satellite.
The researchers validate their approach using both synthetic datasets and real-world observations of China's Space Station. These real-world observations were captured using ground-based telescopes, which present unique challenges compared to traditional 3D reconstruction scenarios. The results show significant improvements over existing methods for reconstructing 3D space objects from these types of ground-based observations.
Critical Analysis
The proposed framework addresses an important and challenging problem in the field of satellite photogrammetry. By leveraging data from small, affordable telescopes, it has the potential to enable more widespread 3D modeling of space objects, which could benefit various applications, such as space situational awareness and orbital debris monitoring.
However, the paper does not provide a comprehensive evaluation of the framework's limitations or potential edge cases. For example, it's unclear how the method would perform with different types of satellites, varying levels of background clutter, or more extreme atmospheric conditions. Further research is needed to understand the full scope of the framework's capabilities and limitations, especially when it comes to reconstructing unseen or dynamic 3D scenes.
Additionally, the computational complexity and runtime of the algorithm are not discussed in detail. As 3D reconstruction from ground-based telescope data is a computationally intensive task, the practical deployability of this approach may depend on further optimizations or hardware acceleration.
Overall, the paper presents a promising step forward in the field of satellite 3D reconstruction from ground-based observations. However, additional research and validation are needed to fully assess the robustness and real-world applicability of the proposed framework.
Conclusion
This paper introduces a novel framework for 3D reconstruction of satellites in low-Earth orbit using video data from small amateur telescopes. The key innovation is the use of an improved 3D Gaussian splatting algorithm that can generate detailed 3D point clouds from the sparse, noisy video data, which is characterized by significant challenges like motion blur, atmospheric disturbances, and limited viewing angles.
The results demonstrate the potential of this approach to outperform existing methods for 3D reconstruction of space objects from ground-based observations. If further developed and validated, this framework could enable more widespread and cost-effective 3D modeling of satellites and other space assets, with applications in areas like space situational awareness and orbital debris monitoring.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
SatSplatYOLO: 3D Gaussian Splatting-based Virtual Object Detection Ensembles for Satellite Feature Recognition
Van Minh Nguyen, Emma Sandidge, Trupti Mahendrakar, Ryan T. White
0
0
On-orbit servicing (OOS), inspection of spacecraft, and active debris removal (ADR). Such missions require precise rendezvous and proximity operations in the vicinity of non-cooperative, possibly unknown, resident space objects. Safety concerns with manned missions and lag times with ground-based control necessitate complete autonomy. In this article, we present an approach for mapping geometries and high-confidence detection of components of unknown, non-cooperative satellites on orbit. We implement accelerated 3D Gaussian splatting to learn a 3D representation of the satellite, render virtual views of the target, and ensemble the YOLOv5 object detector over the virtual views, resulting in reliable, accurate, and precise satellite component detections. The full pipeline capable of running on-board and stand to enable downstream machine intelligence tasks necessary for autonomous guidance, navigation, and control tasks.
6/5/2024
🌿
Advancing Applications of Satellite Photogrammetry: Novel Approaches for Built-up Area Modeling and Natural Environment Monitoring using Stereo/Multi-view Satellite Image-derived 3D Data
Shengxi Gui
0
0
With the development of remote sensing technology in recent decades, spaceborne sensors with sub-meter and meter spatial resolution (Worldview and PlanetScope) have achieved a considerable image quality to generate 3D geospatial data via a stereo matching pipeline. These achievements have significantly increased the data accessibility in 3D, necessitating adapting these 3D geospatial data to analyze human and natural environments. This dissertation explores several novel approaches based on stereo and multi-view satellite image-derived 3D geospatial data, to deal with remote sensing application issues for built-up area modeling and natural environment monitoring, including building model 3D reconstruction, glacier dynamics tracking, and lake algae monitoring. Specifically, the dissertation introduces four parts of novel approaches that deal with the spatial and temporal challenges with satellite-derived 3D data. The first study advances LoD-2 building modeling from satellite-derived Orthophoto and DSMs with a novel approach employing a model-driven workflow that generates building rectangular 3D geometry models. Secondly, we further enhanced our building reconstruction framework for dense urban areas and non-rectangular purposes, we implemented deep learning for unit-level segmentation and introduced a gradient-based circle reconstruction for circular buildings to develop a polygon composition technique for advanced building LoD2 reconstruction. Our third study utilizes high-spatiotemporal resolution PlanetScope satellite imagery for glacier tracking at 3D level in mid-latitude regions. Finally, we proposed a term as Algal Behavior Function to refine the quantification of chlorophyll-a concentrations from satellite imagery in water quality monitoring, addressing algae fluctuations and timing discrepancies between satellite observations and field measurements, thus enhancing the precision of underwater algae volume estimates. Overall, this dissertation demonstrates the extensive potential of satellite photogrammetry applications in addressing urban and environmental challenges. It further showcases innovative analytical methodologies that enhance the applicability of adapting stereo and multi-view very high-resolution satellite-derived 3D data. (See full abstract in the document)
4/22/2024
Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
Kuldeep R Barad, Antoine Richard, Jan Dentler, Miguel Olivares-Mendez, Carol Martinez
0
0
Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
5/31/2024

Photorealistic 3D Urban Scene Reconstruction and Point Cloud Extraction using Google Earth Imagery and Gaussian Splatting
Kyle Gao, Dening Lu, Hongjie He, Linlin Xu, Jonathan Li
0
0
3D urban scene reconstruction and modelling is a crucial research area in remote sensing with numerous applications in academia, commerce, industry, and administration. Recent advancements in view synthesis models have facilitated photorealistic 3D reconstruction solely from 2D images. Leveraging Google Earth imagery, we construct a 3D Gaussian Splatting model of the Waterloo region centered on the University of Waterloo and are able to achieve view-synthesis results far exceeding previous 3D view-synthesis results based on neural radiance fields which we demonstrate in our benchmark. Additionally, we retrieved the 3D geometry of the scene using the 3D point cloud extracted from the 3D Gaussian Splatting model which we benchmarked against our Multi- View-Stereo dense reconstruction of the scene, thereby reconstructing both the 3D geometry and photorealistic lighting of the large-scale urban scene through 3D Gaussian Splatting
6/4/2024