Scenario Execution for Robotics: A generic, backend-agnostic library for running reproducible robotics experiments and tests

0

Sign in to get full access
Overview
- Introduces a generic, backend-agnostic library for running reproducible robotics experiments and tests
- Covers core concepts, related work, technical explanation, critical analysis, and conclusion
Plain English Explanation
This paper presents a new library for conducting robotics experiments and tests in a consistent, reproducible manner. The key idea is to create a generic framework that can work with different underlying "backends" (e.g. simulators, real-world robotic systems) without forcing researchers to rewrite their code for each new setup.
The library provides a standardized way to define experiment scenarios, run them, and collect performance metrics. This allows robotics researchers to more easily compare results across different systems and setups. The authors also discuss how the library can be used for test-driven development and quality diversity optimization of robotics algorithms.
Technical Explanation
The paper introduces a generic, backend-agnostic library for running robotics experiments and tests. The key components include:
- Scenario Definitions: A way to specify experimental scenarios that can be executed across different backends.
- Metric Collection: A standardized approach for collecting performance metrics during experiment runs.
- Execution and Reporting: Functionality to run scenarios, collect results, and generate reports.
The library is designed to work with a variety of backends, such as robotics simulators and real-world robotic systems. This backend-agnostic approach allows researchers to reuse their experiment code across different setups.
The authors demonstrate how the library can be used for test-driven development of robotics algorithms, as well as quality diversity optimization to automatically generate diverse test scenarios.
Critical Analysis
The paper presents a promising approach for improving the reproducibility and comparability of robotics experiments. The generic, backend-agnostic design is a strength, as it can reduce the overhead of setting up new experiment environments.
However, the paper does not provide extensive details on the implementation or performance of the library. It would be helpful to see more concrete examples of how the library can be used in practice, as well as any limitations or challenges encountered.
Additionally, the paper could explore how the library might integrate with existing robotics frameworks and tools, as well as discuss potential ways to extend the functionality in the future.
Conclusion
This paper introduces a novel library that aims to make robotics experiments and tests more reproducible and comparable across different systems and setups. By providing a generic, backend-agnostic framework, the library has the potential to streamline the experimental process and facilitate more robust, data-driven research in robotics.
The ideas presented in this paper could have significant implications for improving the quality and reliability of robotics research, which is an important step towards advancing the field and enabling real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Scenario Execution for Robotics: A generic, backend-agnostic library for running reproducible robotics experiments and tests
Frederik Pasch, Florian Mirus, Yongzhou Zhang, Kay-Ulrich Scholl
Testing and evaluation of robotics systems is a difficult and oftentimes tedious task due to the systems' complexity and a lack of tools to conduct reproducible robotics experiments. Additionally, almost all available tools are either tailored towards a specific application domain, simulator or middleware. Particularly scenario-based testing, a common practice in the domain of automated driving, is not sufficiently covered in the robotics domain. In this paper, we propose a novel backend- and middleware-agnostic approach for conducting systematic, reproducible and automatable robotics experiments called Scenario Execution for Robotics. Our approach is implemented as a Python library built on top of the generic scenario description language OpenSCENARIO 2 and Behavior Trees and is made publicly available on GitHub. In extensive experiments, we demonstrate that our approach supports multiple simulators as backend and can be used as a standalone Python-library or as part of the ROS2 ecosystem. Furthermore, we demonstrate how our approach enables testing over ranges of varying values. Finally, we show how Scenario Execution for Robotics allows to move from simulation-based to real-world experiments with minimal adaptations to the scenario description file.
Read more9/12/2024

0
Algorithmic Scenario Generation as Quality Diversity Optimization
Stefanos Nikolaidis
The increasing complexity of robots and autonomous agents that interact with people highlights the critical need for approaches that systematically test them before deployment. This review paper presents a general framework for solving this problem, describes the insights that we have gained from working on each component of the framework, and shows how integrating these components leads to the discovery of a diverse range of realistic and challenging scenarios that reveal previously unknown failures in deployed robotic systems interacting with people.
Read more9/10/2024
0
Runtime Verification and Field-based Testing for ROS-Based Robotic Systems
Ricardo Caldas, Juan Antonio Pinera Garcia, Matei Schiopu, Patrizio Pelliccione, Genaina Rodrigues, Thorsten Berger
Robotic systems are becoming pervasive and adopted in increasingly many domains, such as manufacturing, healthcare, and space exploration. To this end, engineering software has emerged as a crucial discipline for building maintainable and reusable robotic systems. The robotics software engineering research field has received increasing attention, fostering autonomy as a fundamental goal. However, robotics developers are still challenged to achieve this goal because simulation cannot realistically deliver solutions to emulate real-world phenomena. Robots also need to operate in unpredictable and uncontrollable environments, which require safe and trustworthy self-adaptation capabilities implemented in software. Typical techniques to address the challenges are runtime verification, field-based testing, and mitigation techniques that enable fail-safe solutions. However, no clear guidance exists for architecting ROS-based systems to enable and facilitate runtime verification and field-based testing. This paper aims to fill this gap by providing guidelines to help developers and quality assurance (QA) teams develop, verify, or test their robots in the field. These guidelines are carefully tailored to address the challenges and requirements of testing robotics systems in real-world scenarios. We conducted (i) a literature review on studies addressing runtime verification and field-based testing for robotic systems, (ii) mined ROS-based applications repositories, and (iii) validated the applicability, clarity, and usefulness via two questionnaires with 55 answers overall. We contribute 20 guidelines: 8 for developers and 12 for QA teams formulated for researchers and practitioners in robotic software engineering. Finally, we map our guidelines to open challenges in runtime verification and field-based testing for ROS-based systems, and we outline promising research directions in the field.
Read more8/22/2024
0
A framework for training and benchmarking algorithms that schedule robot tasks
Wojciech Dudek, Daniel Gie{l}dowski, Tomasz Winiarski
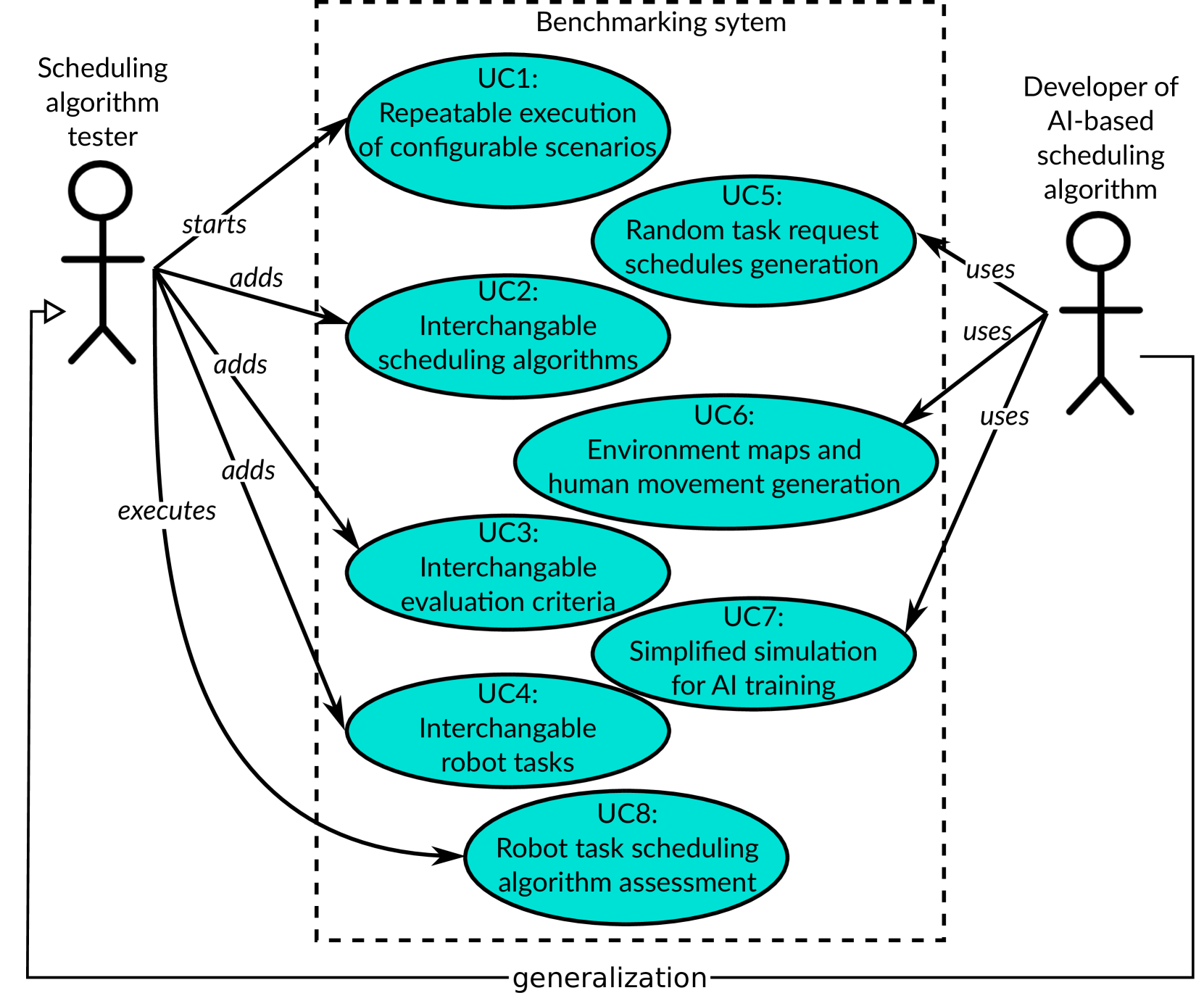
Service robots work in a changing environment habited by exogenous agents like humans. In the service robotics domain, lots of uncertainties result from exogenous actions and inaccurate localisation of objects and the robot itself. This makes the robot task scheduling problem incredibly challenging. In this article, we propose a benchmarking system for systematically assessing the performance of algorithms scheduling robot tasks. The robot environment incorporates a room map, furniture, transportable objects, and moving humans; the system defines interfaces for the algorithms, tasks to be executed, and evaluation methods. The system consists of several tools, easing testing scenario generation for training AI-based scheduling algorithms and statistical testing. For benchmarking purposes, a set of scenarios is chosen, and the performance of several scheduling algorithms is assessed. The system source is published to serve the community for tuning and comparable assessment of robot task scheduling algorithms for service robots.
Read more9/2/2024