A framework for training and benchmarking algorithms that schedule robot tasks

0
Sign in to get full access
Overview
- This paper proposes a framework for training and benchmarking algorithms that schedule robot tasks.
- The research was funded by the Centre for Priority Research Area Artificial Intelligence and Robotics at the Warsaw University of Technology.
- The goal is to create a standardized way to evaluate and compare different algorithms for robot task scheduling.
Plain English Explanation
The paper describes a framework for training and testing algorithms that decide how robots should complete their tasks. The researchers wanted to develop a consistent way to evaluate different scheduling methods and compare their performance.
The framework allows researchers to set up various robot task scenarios, like moving objects or navigating environments, and then run different scheduling algorithms on those tasks. This helps identify which algorithms work best for different types of robot tasks. The goal is to provide a standardized benchmark that the robotics community can use to advance the state-of-the-art in robot task scheduling.
Technical Explanation
The paper presents a framework for training and benchmarking algorithms that schedule tasks for robots. The framework includes:
- A simulator that can model different robot task scenarios, such as object manipulation or navigation.
- A set of standard task scenarios that can be used to evaluate scheduling algorithms.
- Metrics for assessing the performance of scheduling algorithms, such as task completion time or energy efficiency.
- Tools for training and fine-tuning scheduling algorithms using machine learning techniques like neural networks.
The researchers used this framework to benchmark several existing scheduling algorithms and identify their strengths and weaknesses on different task scenarios. The results provide insights into the types of algorithms that work best for various robot applications.
Critical Analysis
The paper provides a valuable contribution by creating a standardized way to evaluate and compare robot task scheduling algorithms. This will help advance the state-of-the-art in this important area of robotics.
However, the paper does not address the limitations of the framework, such as the fidelity of the simulated environments or the generalizability of the benchmark scenarios. Additionally, the paper does not explore the potential biases that may be introduced by the choice of performance metrics or the specific task scenarios.
Further research is needed to validate the framework's effectiveness and to explore ways to make it more comprehensive and inclusive of a wider range of robot applications and use cases.
Conclusion
This paper presents a novel framework for training and benchmarking algorithms that schedule tasks for robots. The framework provides a standardized way to evaluate and compare different scheduling methods, which can help advance the field of robot task scheduling. While the framework is a valuable contribution, there are opportunities for further research to address its limitations and expand its scope to better serve the broader robotics community.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A framework for training and benchmarking algorithms that schedule robot tasks
Wojciech Dudek, Daniel Gie{l}dowski, Tomasz Winiarski
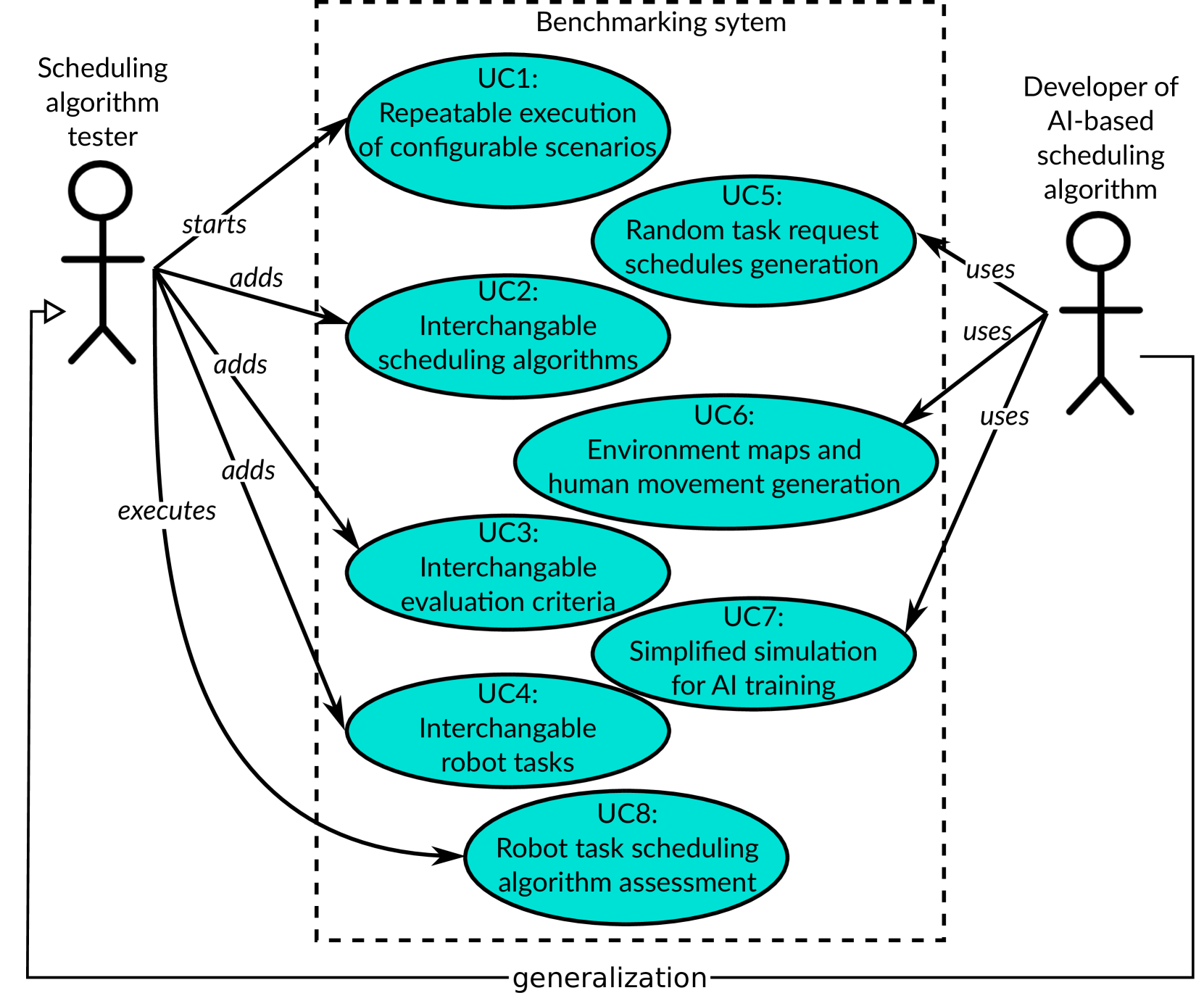
Service robots work in a changing environment habited by exogenous agents like humans. In the service robotics domain, lots of uncertainties result from exogenous actions and inaccurate localisation of objects and the robot itself. This makes the robot task scheduling problem incredibly challenging. In this article, we propose a benchmarking system for systematically assessing the performance of algorithms scheduling robot tasks. The robot environment incorporates a room map, furniture, transportable objects, and moving humans; the system defines interfaces for the algorithms, tasks to be executed, and evaluation methods. The system consists of several tools, easing testing scenario generation for training AI-based scheduling algorithms and statistical testing. For benchmarking purposes, a set of scenarios is chosen, and the performance of several scheduling algorithms is assessed. The system source is published to serve the community for tuning and comparable assessment of robot task scheduling algorithms for service robots.
Read more9/2/2024

0
RoboCAS: A Benchmark for Robotic Manipulation in Complex Object Arrangement Scenarios
Liming Zheng, Feng Yan, Fanfan Liu, Chengjian Feng, Zhuoliang Kang, Lin Ma
Foundation models hold significant potential for enabling robots to perform long-horizon general manipulation tasks. However, the simplicity of tasks and the uniformity of environments in existing benchmarks restrict their effective deployment in complex scenarios. To address this limitation, this paper introduces the textit{RoboCAS} benchmark, the first benchmark specifically designed for complex object arrangement scenarios in robotic manipulation. This benchmark employs flexible and concise scripted policies to efficiently collect a diverse array of demonstrations, showcasing scattered, orderly, and stacked object arrangements within a highly realistic physical simulation environment. It includes complex processes such as target retrieval, obstacle clearance, and robot manipulation, testing agents' abilities to perform long-horizon planning for spatial reasoning and predicting chain reactions under ambiguous instructions. Extensive experiments on multiple baseline models reveal their limitations in managing complex object arrangement scenarios, underscoring the urgent need for intelligent agents capable of performing long-horizon operations in practical deployments and providing valuable insights for future research directions. Project website: url{https://github.com/notFoundThisPerson/RoboCAS-v0}.
Read more7/10/2024

0
Algorithmic Scenario Generation as Quality Diversity Optimization
Stefanos Nikolaidis
The increasing complexity of robots and autonomous agents that interact with people highlights the critical need for approaches that systematically test them before deployment. This review paper presents a general framework for solving this problem, describes the insights that we have gained from working on each component of the framework, and shows how integrating these components leads to the discovery of a diverse range of realistic and challenging scenarios that reveal previously unknown failures in deployed robotic systems interacting with people.
Read more9/10/2024

0
Reinforcement Learning of Multi-robot Task Allocation for Multi-object Transportation with Infeasible Tasks
Yuma Shida, Tomohiko Jimbo, Tadashi Odashima, Takamitsu Matsubara
Multi-object transport using multi-robot systems has the potential for diverse practical applications such as delivery services owing to its efficient individual and scalable cooperative transport. However, allocating transportation tasks of objects with unknown weights remains challenging. Moreover, the presence of infeasible tasks (untransportable objects) can lead to robot stoppage (deadlock). This paper proposes a framework for dynamic task allocation that involves storing task experiences for each task in a scalable manner with respect to the number of robots. First, these experiences are broadcasted from the cloud server to the entire robot system. Subsequently, each robot learns the exclusion levels for each task based on those task experiences, enabling it to exclude infeasible tasks and reset its task priorities. Finally, individual transportation, cooperative transportation, and the temporary exclusion of tasks considered infeasible are achieved. The scalability and versatility of the proposed method were confirmed through numerical experiments with an increased number of robots and objects, including unlearned weight objects. The effectiveness of the temporary deadlock avoidance was also confirmed by introducing additional robots within an episode. The proposed method enables the implementation of task allocation strategies that are feasible for different numbers of robots and various transport tasks without prior consideration of feasibility.
Read more4/19/2024