Scene Adaptive Sparse Transformer for Event-based Object Detection
2404.01882
0
0

Abstract
While recent Transformer-based approaches have shown impressive performances on event-based object detection tasks, their high computational costs still diminish the low power consumption advantage of event cameras. Image-based works attempt to reduce these costs by introducing sparse Transformers. However, they display inadequate sparsity and adaptability when applied to event-based object detection, since these approaches cannot balance the fine granularity of token-level sparsification and the efficiency of window-based Transformers, leading to reduced performance and efficiency. Furthermore, they lack scene-specific sparsity optimization, resulting in information loss and a lower recall rate. To overcome these limitations, we propose the Scene Adaptive Sparse Transformer (SAST). SAST enables window-token co-sparsification, significantly enhancing fault tolerance and reducing computational overhead. Leveraging the innovative scoring and selection modules, along with the Masked Sparse Window Self-Attention, SAST showcases remarkable scene-aware adaptability: It focuses only on important objects and dynamically optimizes sparsity level according to scene complexity, maintaining a remarkable balance between performance and computational cost. The evaluation results show that SAST outperforms all other dense and sparse networks in both performance and efficiency on two large-scale event-based object detection datasets (1Mpx and Gen1). Code: https://github.com/Peterande/SAST
Get summaries of the top AI research delivered straight to your inbox:
Overview
• This paper presents a new event-based object detection system called the Scene Adaptive Sparse Transformer (SAST).
• SAST uses a sparse transformer architecture that can adaptively capture spatial and temporal features from event streams to improve object detection performance.
• The system is evaluated on challenging event-based object detection benchmarks and shows improvements over existing methods.
Plain English Explanation
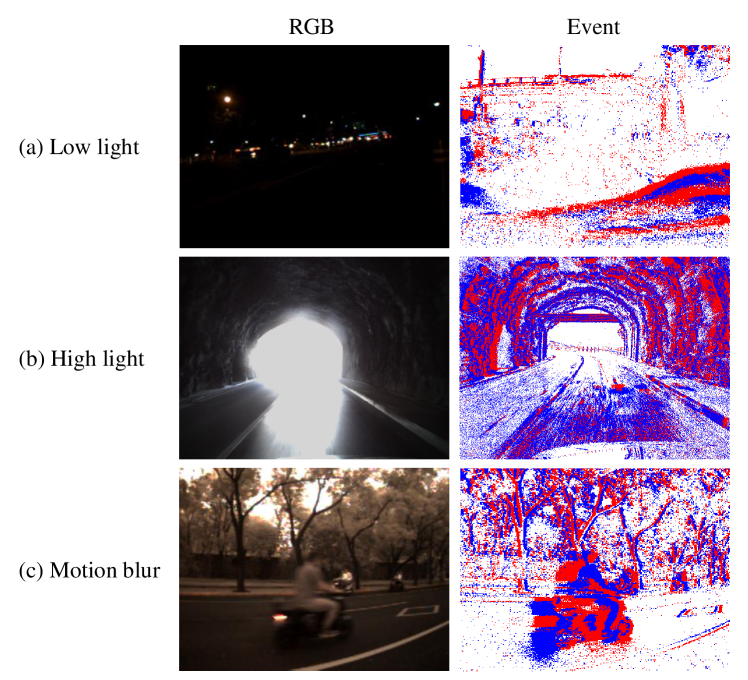
The paper introduces a new way to detect objects in video captured by event cameras. Event cameras are a type of camera that record changes in brightness over time, rather than traditional full-frame video.
The key innovation is the use of a "sparse transformer" neural network. This allows the system to focus on the most important parts of the event stream when detecting objects, rather than processing the entire video feed. The transformer can adapt its attention to the specific scene, which helps it identify objects more accurately.
The authors show that their Scene Adaptive Sparse Transformer (SAST) outperforms previous event-based object detectors on standard benchmarks. This suggests the sparse transformer approach is effective at extracting useful information from the complex, sparse event data.
Overall, the SAST system demonstrates how advanced neural network architectures can be tailored to the unique properties of event cameras, leading to improved object detection for applications like robotics and autonomous vehicles.
Technical Explanation
The paper proposes the Scene Adaptive Sparse Transformer (SAST) for event-based object detection. SAST is built on a sparse transformer architecture that can adaptively capture spatial and temporal features from the event stream.
The key components are:
- Event Embedding: The input event data is embedded into a high-dimensional feature space.
- Sparse Transformer Encoder: A transformer encoder with sparse attention is used to extract spatial-temporal features from the embedded events.
- Scene Adaptive Attention: The attention mechanism in the transformer is adapted based on the current scene to focus on the most relevant features.
- Object Detection Head: The extracted features are fed into a detection head to predict bounding boxes and object classes.
The authors evaluate SAST on multiple event-based object detection benchmarks and show consistent improvements over prior state-of-the-art methods. Ablation studies demonstrate the importance of the sparse transformer and scene adaptive attention in the system's strong performance.
Critical Analysis
The paper provides a compelling technical solution to the challenging problem of event-based object detection. The sparse transformer architecture and scene-adaptive attention mechanism are well-motivated and the experimental results are impressive.
However, the paper does not address some potential limitations of the approach. For example, the system may struggle in highly dynamic scenes with rapidly moving objects, as the adaptive attention may not be able to keep up. Additionally, the computationally expensive transformer model could limit the real-time performance of the system, an important consideration for many event-based applications.
Further research could explore ways to make the transformer more efficient, potentially through model pruning or distillation techniques. Evaluating SAST in a wider range of real-world scenarios would also help assess its practical limitations and guide future improvements.
Overall, the SAST system represents an innovative step forward in event-based perception, demonstrating the value of tailoring neural network architectures to the unique properties of event data. With continued research and development, this work could lead to more robust and capable event-based object detection systems for robotics, autonomous vehicles, and other applications.
Conclusion
This paper presents the Scene Adaptive Sparse Transformer (SAST), a novel event-based object detection system that uses a sparse transformer architecture with scene-adaptive attention. SAST outperforms previous state-of-the-art methods on standard benchmarks, showing the effectiveness of its approach to extracting useful information from the complex, sparse event data.
The sparse transformer and scene-adaptive attention mechanisms are key technical innovations that enable SAST's strong performance. While the paper does not address all potential limitations, it represents an important step forward in event-based perception research. With further optimization and real-world testing, SAST could lead to more robust and capable event-based object detection systems with applications in robotics, autonomous vehicles, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Deep Event-based Object Detection in Autonomous Driving: A Survey
Bingquan Zhou, Jie Jiang
0
0
Object detection plays a critical role in autonomous driving, where accurately and efficiently detecting objects in fast-moving scenes is crucial. Traditional frame-based cameras face challenges in balancing latency and bandwidth, necessitating the need for innovative solutions. Event cameras have emerged as promising sensors for autonomous driving due to their low latency, high dynamic range, and low power consumption. However, effectively utilizing the asynchronous and sparse event data presents challenges, particularly in maintaining low latency and lightweight architectures for object detection. This paper provides an overview of object detection using event data in autonomous driving, showcasing the competitive benefits of event cameras.
5/8/2024
State Space Models for Event Cameras
Nikola Zubi'c, Mathias Gehrig, Davide Scaramuzza
0
0
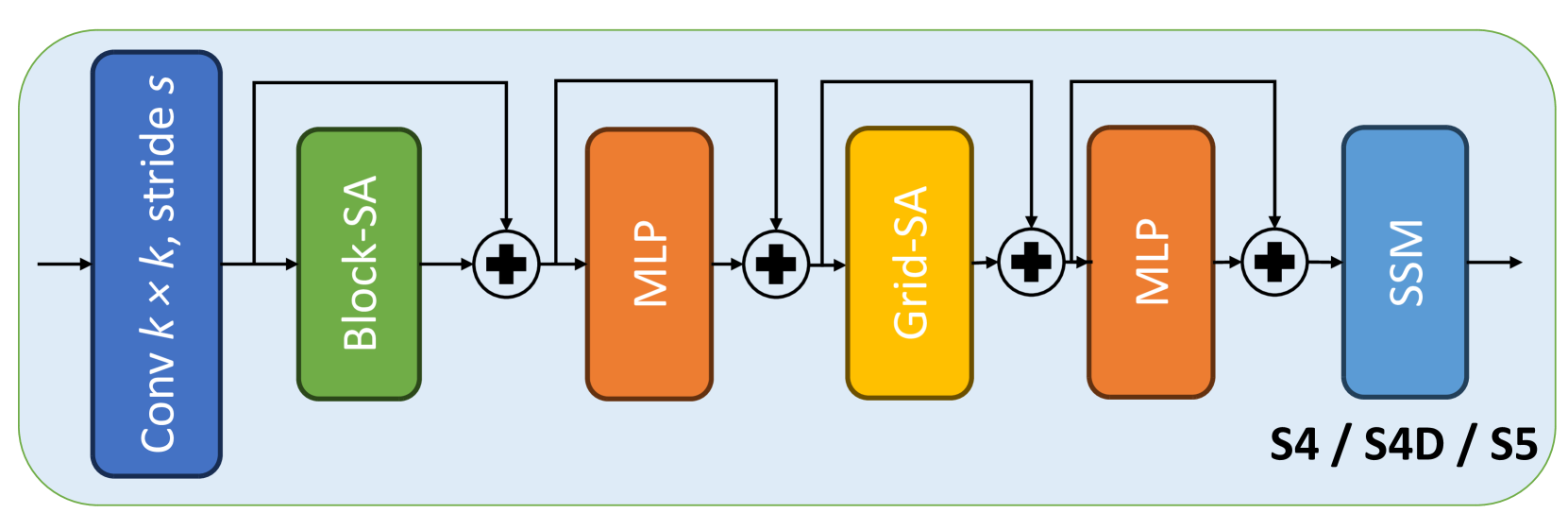
Today, state-of-the-art deep neural networks that process event-camera data first convert a temporal window of events into dense, grid-like input representations. As such, they exhibit poor generalizability when deployed at higher inference frequencies (i.e., smaller temporal windows) than the ones they were trained on. We address this challenge by introducing state-space models (SSMs) with learnable timescale parameters to event-based vision. This design adapts to varying frequencies without the need to retrain the network at different frequencies. Additionally, we investigate two strategies to counteract aliasing effects when deploying the model at higher frequencies. We comprehensively evaluate our approach against existing methods based on RNN and Transformer architectures across various benchmarks, including Gen1 and 1 Mpx event camera datasets. Our results demonstrate that SSM-based models train 33% faster and also exhibit minimal performance degradation when tested at higher frequencies than the training input. Traditional RNN and Transformer models exhibit performance drops of more than 20 mAP, with SSMs having a drop of 3.76 mAP, highlighting the effectiveness of SSMs in event-based vision tasks.
4/19/2024
🔎
Automotive Object Detection via Learning Sparse Events by Spiking Neurons
Hu Zhang, Yanchen Li, Luziwei Leng, Kaiwei Che, Qian Liu, Qinghai Guo, Jianxing Liao, Ran Cheng
0
0
Event-based sensors, distinguished by their high temporal resolution of 1 $mathrm{mu}text{s}$ and a dynamic range of 120 $text{dB}$, stand out as ideal tools for deployment in fast-paced settings like vehicles and drones. Traditional object detection techniques that utilize Artificial Neural Networks (ANNs) face challenges due to the sparse and asynchronous nature of the events these sensors capture. In contrast, Spiking Neural Networks (SNNs) offer a promising alternative, providing a temporal representation that is inherently aligned with event-based data. This paper explores the unique membrane potential dynamics of SNNs and their ability to modulate sparse events. We introduce an innovative spike-triggered adaptive threshold mechanism designed for stable training. Building on these insights, we present a specialized spiking feature pyramid network (SpikeFPN) optimized for automotive event-based object detection. Comprehensive evaluations demonstrate that SpikeFPN surpasses both traditional SNNs and advanced ANNs enhanced with attention mechanisms. Evidently, SpikeFPN achieves a mean Average Precision (mAP) of 0.477 on the GEN1 Automotive Detection (GAD) benchmark dataset, marking significant increases over the selected SNN baselines. Moreover, the efficient design of SpikeFPN ensures robust performance while optimizing computational resources, attributed to its innate sparse computation capabilities.
5/3/2024
SAFDNet: A Simple and Effective Network for Fully Sparse 3D Object Detection
Gang Zhang, Junnan Chen, Guohuan Gao, Jianmin Li, Si Liu, Xiaolin Hu
0
0
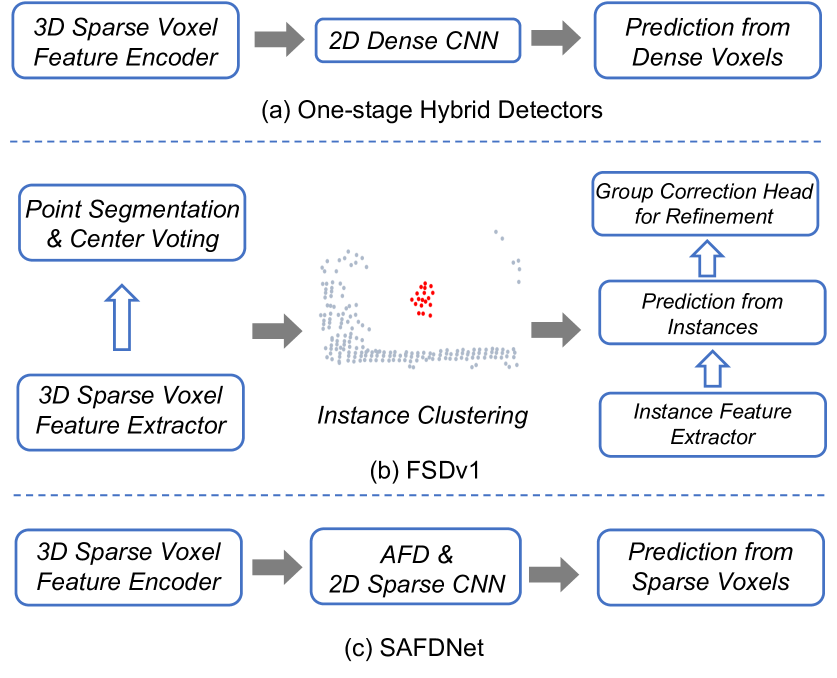
LiDAR-based 3D object detection plays an essential role in autonomous driving. Existing high-performing 3D object detectors usually build dense feature maps in the backbone network and prediction head. However, the computational costs introduced by the dense feature maps grow quadratically as the perception range increases, making these models hard to scale up to long-range detection. Some recent works have attempted to construct fully sparse detectors to solve this issue; nevertheless, the resulting models either rely on a complex multi-stage pipeline or exhibit inferior performance. In this work, we propose SAFDNet, a straightforward yet highly effective architecture, tailored for fully sparse 3D object detection. In SAFDNet, an adaptive feature diffusion strategy is designed to address the center feature missing problem. We conducted extensive experiments on Waymo Open, nuScenes, and Argoverse2 datasets. SAFDNet performed slightly better than the previous SOTA on the first two datasets but much better on the last dataset, which features long-range detection, verifying the efficacy of SAFDNet in scenarios where long-range detection is required. Notably, on Argoverse2, SAFDNet surpassed the previous best hybrid detector HEDNet by 2.6% mAP while being 2.1x faster, and yielded 2.1% mAP gains over the previous best sparse detector FSDv2 while being 1.3x faster. The code will be available at https://github.com/zhanggang001/HEDNet.
4/23/2024