SchurVINS: Schur Complement-Based Lightweight Visual Inertial Navigation System

0

Sign in to get full access
Overview
- This paper presents a Schur complement-based lightweight visual inertial navigation system called "SchurVINS".
- SchurVINS aims to provide accurate and efficient localization and mapping by leveraging the advantages of Schur complement optimization.
- The system is designed to be computationally lightweight, making it suitable for real-time applications on resource-constrained platforms.
Plain English Explanation
The paper introduces a new visual-inertial navigation system (VINS) called "SchurVINS" that uses a mathematical technique called the Schur complement to improve its performance. VINS systems combine information from cameras and inertial measurement units (IMUs) to estimate the position and orientation of a device, such as a smartphone or robot, as it moves through the environment.
The key idea behind SchurVINS is to exploit the Schur complement, which is a way of simplifying and speeding up the optimization process used to estimate the device's pose (position and orientation) from the sensor data. By using the Schur complement, the system can reduce the computational complexity of the optimization, making it more efficient and suitable for use on devices with limited processing power, like smartphones or small robots.
The authors claim that SchurVINS can achieve accurate localization and mapping while being lightweight and suitable for real-time applications. This could be useful for a variety of applications, such as augmented reality, autonomous navigation, and robotics.
Technical Explanation
The paper presents the "SchurVINS" framework, which is a Schur complement-based visual-inertial navigation system (VINS). VINS systems combine data from cameras and inertial measurement units (IMUs) to estimate the 6-degree-of-freedom (6DoF) pose of a device as it moves through an environment.
The key innovation of SchurVINS is the use of the Schur complement to optimize the pose estimation. The Schur complement is a mathematical technique that can be used to simplify the optimization problem by isolating and reducing the number of variables that need to be explicitly solved for. This leads to a more computationally efficient optimization process, which is important for deploying VINS on resource-constrained platforms like smartphones or small robots.
The paper describes the overall SchurVINS framework, including the sensor model, state representation, and optimization formulation. The authors also provide details on how the Schur complement is applied to the VINS problem to achieve the desired computational efficiency.
The performance of SchurVINS is evaluated through extensive experiments, including comparisons to other state-of-the-art VINS methods. The results demonstrate that SchurVINS can achieve accurate localization and mapping capabilities while being more lightweight and efficient than other approaches.
Critical Analysis
The paper makes a compelling case for the benefits of using the Schur complement optimization in the context of visual-inertial navigation systems. The authors have demonstrated the effectiveness of their approach through thorough experimentation and comparison to other VINS methods.
One potential limitation of the work is the reliance on specific sensor models and state representations, which may limit the generalizability of the approach. It would be interesting to see how SchurVINS performs when applied to a wider range of sensor configurations or different state parameterizations.
Additionally, the paper does not deeply explore the potential trade-offs between the computational efficiency gains and any potential impacts on the overall accuracy or robustness of the system. Further analysis in this area could provide valuable insights into the practical advantages and limitations of the SchurVINS framework.
Despite these minor caveats, the research presented in this paper represents a valuable contribution to the field of visual-inertial navigation, particularly for applications where computational resources are constrained. The use of the Schur complement optimization is a clever and novel approach that could inspire further advancements in this area.
Conclusion
The "SchurVINS" paper introduces a Schur complement-based visual-inertial navigation system that aims to provide accurate localization and mapping capabilities while being computationally efficient and lightweight. By leveraging the Schur complement optimization, the authors have developed a VINS framework that can be deployed on resource-constrained platforms, such as smartphones or small robots.
The experimental results demonstrate the effectiveness of the SchurVINS approach, showing that it can achieve performance comparable to state-of-the-art VINS methods while being more computationally efficient. This work represents an important step forward in the development of practical and deployable VINS solutions, with potential applications in areas like augmented reality, autonomous navigation, and robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SchurVINS: Schur Complement-Based Lightweight Visual Inertial Navigation System
Yunfei Fan, Tianyu Zhao, Guidong Wang
Accuracy and computational efficiency are the most important metrics to Visual Inertial Navigation System (VINS). The existing VINS algorithms with either high accuracy or low computational complexity, are difficult to provide the high precision localization in resource-constrained devices. To this end, we propose a novel filter-based VINS framework named SchurVINS, which could guarantee both high accuracy by building a complete residual model and low computational complexity with Schur complement. Technically, we first formulate the full residual model where Gradient, Hessian and observation covariance are explicitly modeled. Then Schur complement is employed to decompose the full model into ego-motion residual model and landmark residual model. Finally, Extended Kalman Filter (EKF) update is implemented in these two models with high efficiency. Experiments on EuRoC and TUM-VI datasets show that our method notably outperforms state-of-the-art (SOTA) methods in both accuracy and computational complexity. The experimental code of SchurVINS is available at https://github.com/bytedance/SchurVINS.
Read more6/7/2024
0
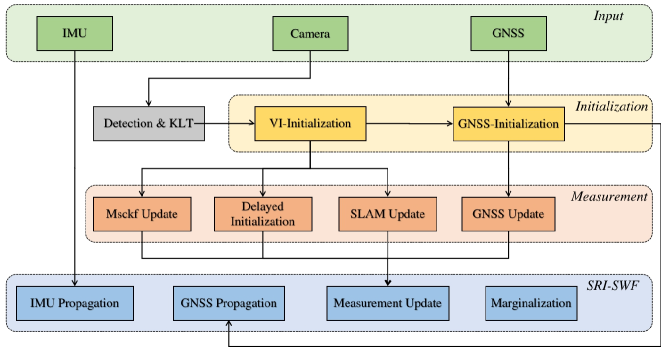
Square-Root Inverse Filter-based GNSS-Visual-Inertial Navigation
Jun Hu, Xiaoming Lang, Feng Zhang, Yinian Mao, Guoquan Huang
While Global Navigation Satellite System (GNSS) is often used to provide global positioning if available, its intermittency and/or inaccuracy calls for fusion with other sensors. In this paper, we develop a novel GNSS-Visual-Inertial Navigation System (GVINS) that fuses visual, inertial, and raw GNSS measurements within the square-root inverse sliding window filtering (SRI-SWF) framework in a tightly coupled fashion, which thus is termed SRI-GVINS. In particular, for the first time, we deeply fuse the GNSS pseudorange, Doppler shift, single-differenced pseudorange, and double-differenced carrier phase measurements, along with the visual-inertial measurements. Inherited from the SRI-SWF, the proposed SRI-GVINS gains significant numerical stability and computational efficiency over the start-of-the-art methods. Additionally, we propose to use a filter to sequentially initialize the reference frame transformation till converges, rather than collecting measurements for batch optimization. We also perform online calibration of GNSS-IMU extrinsic parameters to mitigate the possible extrinsic parameter degradation. The proposed SRI-GVINS is extensively evaluated on our own collected UAV datasets and the results demonstrate that the proposed method is able to suppress VIO drift in real-time and also show the effectiveness of online GNSS-IMU extrinsic calibration. The experimental validation on the public datasets further reveals that the proposed SRI-GVINS outperforms the state-of-the-art methods in terms of both accuracy and efficiency.
Read more5/20/2024

0
Visual-Inertial SLAM as Simple as A, B, VINS
Nathaniel Merrill, Guoquan Huang
We present AB-VINS, a different kind of visual-inertial SLAM system. Unlike most VINS systems which only use hand-crafted techniques, AB-VINS makes use of three different deep networks. Instead of estimating sparse feature positions, AB-VINS only estimates the scale and bias parameters (a and b) of monocular depth maps, as well as other terms to correct the depth using multi-view information which results in a compressed feature state. Despite being an optimization-based system, the main VIO thread of AB-VINS surpasses the efficiency of a state-of-the-art filter-based method while also providing dense depth. While state-of-the-art loop-closing SLAM systems have to relinearize a number of variables linear the number of keyframes, AB-VINS can perform loop closures while only affecting a constant number of variables. This is due to a novel data structure called the memory tree, in which the keyframe poses are defined relative to each other rather than all in one global frame, allowing for all but a few states to be fixed. AB-VINS is not as accurate as state-of-the-art VINS systems, but it is shown through careful experimentation to be more robust.
Read more6/18/2024

0
SuperVINS: A visual-inertial SLAM framework integrated deep learning features
Hongkun Luo, Chi Guo, Yang Liu, Zengke Li
In this article, we propose enhancements to VINS-Fusion by incorporating deep learning features and deep learning matching methods. We implemented the training of deep learning feature bag of words and utilized these features for loop closure detection. Additionally, we introduce the RANSAC algorithm in the deep learning feature matching module to optimize matching. SuperVINS, an improved version of VINS-Fusion, outperforms it in terms of positioning accuracy, robustness, and more. Particularly in challenging scenarios like low illumination and rapid jitter, traditional geometric features fail to fully exploit image information, whereas deep learning features excel at capturing image features.To validate our proposed improvement scheme, we conducted experiments using open source datasets. We performed a comprehensive analysis of the experimental results from both qualitative and quantitative perspectives. The results demonstrate the feasibility and effectiveness of this deep learning-based approach for SLAM systems.To foster knowledge exchange in this field, we have made the code for this article publicly available. You can find the code at this link: https://github.com/luohongk/SuperVINS.
Read more8/1/2024