Square-Root Inverse Filter-based GNSS-Visual-Inertial Navigation

0
Sign in to get full access
Overview
- This paper presents a Square-Root Inverse Sliding-Window Filter (SRISF) for GNSS-Visual-Inertial Navigation.
- The SRISF combines GNSS, visual, and inertial measurements to provide accurate and robust state estimation, addressing challenges in GNSS-based localization and visual-inertial odometry (VIO).
- The method leverages the advantages of square-root formulation and inverse filtering to achieve efficient and numerically stable state estimation.
Plain English Explanation
The paper introduces a new navigation system that combines information from different sensors - Global Navigation Satellite System (GNSS), cameras, and inertial measurement units (IMUs) - to accurately track the position and orientation of a moving object, such as a robot or a vehicle.
The key innovation is the use of a Square-Root Inverse Sliding-Window Filter (SRISF), which processes the sensor data in an efficient and numerically stable way. This helps overcome challenges faced by traditional GNSS-based localization, which can be inaccurate in urban environments, and visual-inertial odometry, which can suffer from drift.
By combining the strengths of different sensors, the SRISF can provide a more reliable and robust estimate of the object's state (position, velocity, orientation, etc.) compared to using any single sensor alone. This can be particularly useful for applications like autonomous driving, where accurate and reliable localization is critical for safe navigation.
Technical Explanation
The paper presents the Square-Root Inverse Sliding-Window Filter (SRISF), a novel approach for GNSS-Visual-Inertial Navigation. The SRISF leverages the advantages of square-root formulation and inverse filtering to achieve efficient and numerically stable state estimation.
The state estimation problem is formulated as a sliding-window optimization problem, where the states of the current and past time steps are jointly estimated using the available GNSS, visual, and inertial measurements. The square-root inverse filtering technique is employed to efficiently solve this optimization problem, providing accurate and consistent state estimates.
The key features of the SRISF include:
-
Square-Root Formulation: The state estimation problem is expressed in a square-root form, which improves numerical stability and computational efficiency compared to conventional Kalman filter-based approaches.
-
Inverse Filtering: The SRISF uses an inverse filtering technique, which allows for efficient marginalization of past states and provides a more accurate and consistent state estimate.
-
Sliding-Window Optimization: The state estimation is performed over a sliding window of past states, which helps to mitigate the effects of sensor biases and provide more robust localization.
The paper evaluates the performance of the SRISF-based GNSS-Visual-Inertial Navigation system through extensive experiments, including both simulations and real-world datasets. The results demonstrate the improved accuracy, robustness, and computational efficiency of the proposed approach compared to existing methods.
Critical Analysis
The paper presents a well-designed and comprehensive solution for GNSS-Visual-Inertial Navigation, addressing important challenges in localization and sensor fusion. The use of square-root formulation and inverse filtering is a notable contribution, as it helps to improve the numerical stability and computational efficiency of the state estimation process.
One potential limitation of the proposed approach is the reliance on a sliding-window optimization, which may introduce additional complexity and computational overhead compared to more traditional Kalman filter-based methods. Additionally, the paper does not provide a detailed analysis of the algorithm's robustness to sensor failures or extreme environmental conditions, which could be an important consideration for real-world applications.
Furthermore, the paper could have provided a more comprehensive comparison with other state-of-the-art GNSS-Visual-Inertial Navigation algorithms, such as tightly-coupled sensor fusion or learning-based VIO, to better contextualize the contributions and limitations of the SRISF-based approach.
Overall, the paper presents a promising and technically sound solution for GNSS-Visual-Inertial Navigation, but further research and evaluation may be needed to fully assess its practical applicability and performance in real-world scenarios.
Conclusion
This paper introduces the Square-Root Inverse Sliding-Window Filter (SRISF), a novel approach for GNSS-Visual-Inertial Navigation. The SRISF combines measurements from GNSS, cameras, and inertial sensors to provide accurate and robust state estimation, addressing the limitations of traditional GNSS-based localization and visual-inertial odometry.
The key innovations of the SRISF include the use of square-root formulation and inverse filtering, which improve the numerical stability and computational efficiency of the state estimation process. The sliding-window optimization further enhances the robustness of the system by mitigating the effects of sensor biases and providing consistent state estimates.
The experimental results demonstrate the superior performance of the SRISF-based GNSS-Visual-Inertial Navigation system compared to existing methods, highlighting its potential for applications such as autonomous vehicles, robotics, and augmented reality. While the paper presents a well-designed solution, further research may be needed to fully assess its real-world applicability and explore potential extensions or improvements.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Square-Root Inverse Filter-based GNSS-Visual-Inertial Navigation
Jun Hu, Xiaoming Lang, Feng Zhang, Yinian Mao, Guoquan Huang
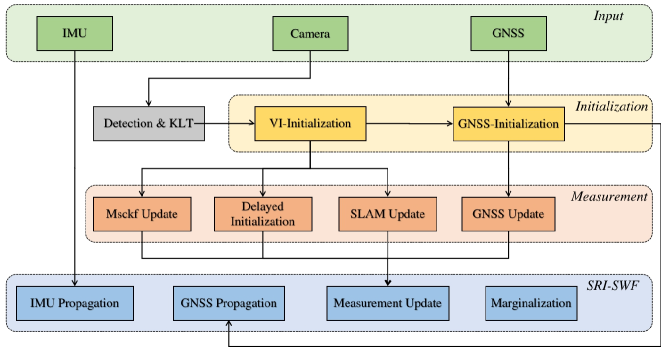
While Global Navigation Satellite System (GNSS) is often used to provide global positioning if available, its intermittency and/or inaccuracy calls for fusion with other sensors. In this paper, we develop a novel GNSS-Visual-Inertial Navigation System (GVINS) that fuses visual, inertial, and raw GNSS measurements within the square-root inverse sliding window filtering (SRI-SWF) framework in a tightly coupled fashion, which thus is termed SRI-GVINS. In particular, for the first time, we deeply fuse the GNSS pseudorange, Doppler shift, single-differenced pseudorange, and double-differenced carrier phase measurements, along with the visual-inertial measurements. Inherited from the SRI-SWF, the proposed SRI-GVINS gains significant numerical stability and computational efficiency over the start-of-the-art methods. Additionally, we propose to use a filter to sequentially initialize the reference frame transformation till converges, rather than collecting measurements for batch optimization. We also perform online calibration of GNSS-IMU extrinsic parameters to mitigate the possible extrinsic parameter degradation. The proposed SRI-GVINS is extensively evaluated on our own collected UAV datasets and the results demonstrate that the proposed method is able to suppress VIO drift in real-time and also show the effectiveness of online GNSS-IMU extrinsic calibration. The experimental validation on the public datasets further reveals that the proposed SRI-GVINS outperforms the state-of-the-art methods in terms of both accuracy and efficiency.
Read more5/20/2024

0
SchurVINS: Schur Complement-Based Lightweight Visual Inertial Navigation System
Yunfei Fan, Tianyu Zhao, Guidong Wang
Accuracy and computational efficiency are the most important metrics to Visual Inertial Navigation System (VINS). The existing VINS algorithms with either high accuracy or low computational complexity, are difficult to provide the high precision localization in resource-constrained devices. To this end, we propose a novel filter-based VINS framework named SchurVINS, which could guarantee both high accuracy by building a complete residual model and low computational complexity with Schur complement. Technically, we first formulate the full residual model where Gradient, Hessian and observation covariance are explicitly modeled. Then Schur complement is employed to decompose the full model into ego-motion residual model and landmark residual model. Finally, Extended Kalman Filter (EKF) update is implemented in these two models with high efficiency. Experiments on EuRoC and TUM-VI datasets show that our method notably outperforms state-of-the-art (SOTA) methods in both accuracy and computational complexity. The experimental code of SchurVINS is available at https://github.com/bytedance/SchurVINS.
Read more6/7/2024

0
Visual-Inertial SLAM as Simple as A, B, VINS
Nathaniel Merrill, Guoquan Huang
We present AB-VINS, a different kind of visual-inertial SLAM system. Unlike most VINS systems which only use hand-crafted techniques, AB-VINS makes use of three different deep networks. Instead of estimating sparse feature positions, AB-VINS only estimates the scale and bias parameters (a and b) of monocular depth maps, as well as other terms to correct the depth using multi-view information which results in a compressed feature state. Despite being an optimization-based system, the main VIO thread of AB-VINS surpasses the efficiency of a state-of-the-art filter-based method while also providing dense depth. While state-of-the-art loop-closing SLAM systems have to relinearize a number of variables linear the number of keyframes, AB-VINS can perform loop closures while only affecting a constant number of variables. This is due to a novel data structure called the memory tree, in which the keyframe poses are defined relative to each other rather than all in one global frame, allowing for all but a few states to be fixed. AB-VINS is not as accurate as state-of-the-art VINS systems, but it is shown through careful experimentation to be more robust.
Read more6/18/2024
🤷
0
Sky-GVIO: an enhanced GNSS/INS/Vision navigation with FCN-based sky-segmentation in urban canyon
Jingrong Wang, Bo Xu, Ronghe Jin, Shoujian Zhang, Kefu Gao, Jingnan Liu
Accurate, continuous, and reliable positioning is a critical component of achieving autonomous driving. However, in complex urban canyon environments, the vulnerability of a stand-alone sensor and non-line-of-sight (NLOS) caused by high buildings, trees, and elevated structures seriously affect positioning results. To address these challenges, a sky-view images segmentation algorithm based on Fully Convolutional Network (FCN) is proposed for GNSS NLOS detection. Building upon this, a novel NLOS detection and mitigation algorithm (named S-NDM) is extended to the tightly coupled Global Navigation Satellite Systems (GNSS), Inertial Measurement Units (IMU), and visual feature system which is called Sky-GVIO, with the aim of achieving continuous and accurate positioning in urban canyon environments. Furthermore, the system harmonizes Single Point Positioning (SPP) with Real-Time Kinematic (RTK) methodologies to bolster its operational versatility and resilience. In urban canyon environments, the positioning performance of S-NDM algorithm proposed in this paper is evaluated under different tightly coupled SPP-related and RTK-related models. The results exhibit that Sky-GVIO system achieves meter-level accuracy under SPP mode and sub-decimeter precision with RTK, surpassing the performance of GNSS/INS/Vision frameworks devoid of S-NDM. Additionally, the sky-view image dataset, inclusive of training and evaluation subsets, has been made publicly accessible for scholarly exploration at https://github.com/whuwangjr/sky-view-images .
Read more8/6/2024