Self-supervised visual learning from interactions with objects

0

Sign in to get full access
Overview
This paper explores a novel approach to self-supervised visual learning by having agents interact with objects in a virtual environment. The key idea is that through these interactions, the agents can learn rich visual representations of objects without the need for labeled training data. The authors demonstrate that this approach can lead to significant performance improvements on downstream computer vision tasks, even in low-data regimes.
Plain English Explanation
Imagine you're a young child learning about the world around you. As you play with different toys and objects, you start to develop an intuitive understanding of how they look, feel, and behave. This is the core insight behind the research in this paper. The authors hypothesized that if they could create a similar "learning through interaction" scenario for AI systems, the agents would be able to build up a deep understanding of visual objects without being explicitly shown thousands of labeled examples.
To test this, the researchers created a virtual environment where AI agents could freely interact with various 3D objects. As the agents manipulated and explored these objects, the system recorded the visual data and used it to train the agents' neural networks. The key benefit of this approach is that it allows the agents to learn object representations in a self-supervised manner, without the need for human-annotated training data.
The results of the experiments demonstrate that this interaction-based learning approach can lead to significant performance gains on a variety of computer vision tasks, even when the amount of labeled training data is limited. This is an exciting development, as it suggests that AI systems can learn powerful visual representations through their own exploration and interaction with the world, much like how humans and animals develop their understanding of their environment.
Technical Explanation
The paper presents a framework for self-supervised visual learning from interactions with objects in a virtual environment. The key components of the system are:
-
Virtual Environment: The authors created a 3D virtual environment populated with a diverse set of objects that the agents could freely interact with and manipulate.
-
Agent-Object Interactions: The agents were able to perform various interactions with the objects, such as grasping, pushing, pulling, and rotating them. These interactions were recorded as sequences of visual observations and associated action commands.
-
Self-Supervised Representation Learning: The visual observations and interaction data were used to train a neural network-based visual encoder in a self-supervised manner. The goal was for the encoder to learn rich, generalizable representations of the objects that could be useful for downstream computer vision tasks.
-
Downstream Evaluation: The authors evaluated the learned representations on a variety of computer vision tasks, such as object recognition, pose estimation, and few-shot learning. They compared the performance of the self-supervised representations to those learned from standard supervised training on large labeled datasets.
The key findings of the paper are that the self-supervised visual representations learned through interaction-based learning can outperform supervised representations, especially in low-data regimes. This suggests that the interaction-based approach allows the agents to capture more nuanced and generalizable visual features than what can be learned from static image datasets alone.
Critical Analysis
The paper presents a promising approach to self-supervised visual learning, but there are a few potential limitations and areas for further research:
-
Scalability to Real-World Environments: The experiments were conducted in a simulated virtual environment, which may not fully capture the complexity and variability of real-world object interactions. Further research is needed to understand how well the approach would scale to more realistic settings.
-
Learning Efficiency: While the interaction-based learning approach showed benefits in low-data regimes, it's unclear how efficient the learning process is compared to other self-supervised techniques, such as contrastive learning or context-based learning. Exploring ways to further improve the sample efficiency of the interaction-based learning could be an important next step.
-
Transferability to Downstream Tasks: The paper focused on evaluating the learned representations on computer vision tasks that were relatively similar to the interaction-based learning. It would be valuable to investigate how well the representations transfer to more diverse and challenging tasks, such as those involving high-level reasoning or complex multi-modal understanding.
Overall, the research presented in this paper represents an exciting step forward in the field of self-supervised learning, with the potential to reduce the reliance on large labeled datasets and enable more efficient and generalizable visual learning.
Conclusion
This paper introduces a novel approach to self-supervised visual learning by having AI agents interact with objects in a virtual environment. The key insight is that the visual and interaction data captured during these object manipulations can be used to train powerful visual representations without the need for labeled training data.
The results demonstrate that the learned representations can outperform those trained in a supervised manner, particularly in low-data regimes. This suggests that the interaction-based learning approach allows the agents to capture more nuanced and generalizable visual features than what can be learned from static image datasets alone.
While there are some limitations and areas for further research, such as scaling the approach to real-world environments and understanding its transferability to diverse downstream tasks, this work represents an exciting step forward in the field of self-supervised learning. By leveraging an agent's own interactions with the world, we may be able to unlock more efficient and versatile visual learning, with broad implications for a wide range of computer vision applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Self-supervised visual learning from interactions with objects
Arthur Aubret, C'eline Teuli`ere, Jochen Triesch
Self-supervised learning (SSL) has revolutionized visual representation learning, but has not achieved the robustness of human vision. A reason for this could be that SSL does not leverage all the data available to humans during learning. When learning about an object, humans often purposefully turn or move around objects and research suggests that these interactions can substantially enhance their learning. Here we explore whether such object-related actions can boost SSL. For this, we extract the actions performed to change from one ego-centric view of an object to another in four video datasets. We then introduce a new loss function to learn visual and action embeddings by aligning the performed action with the representations of two images extracted from the same clip. This permits the performed actions to structure the latent visual representation. Our experiments show that our method consistently outperforms previous methods on downstream category recognition. In our analysis, we find that the observed improvement is associated with a better viewpoint-wise alignment of different objects from the same category. Overall, our work demonstrates that embodied interactions with objects can improve SSL of object categories.
Read more7/10/2024
0
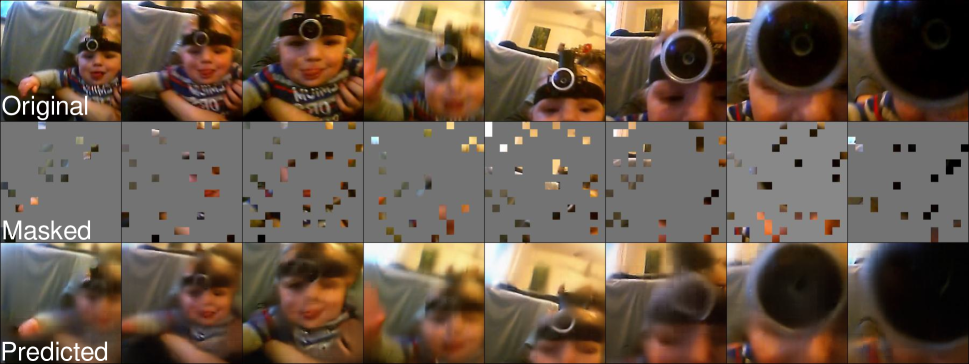
Self-supervised learning of video representations from a child's perspective
A. Emin Orhan, Wentao Wang, Alex N. Wang, Mengye Ren, Brenden M. Lake
Children learn powerful internal models of the world around them from a few years of egocentric visual experience. Can such internal models be learned from a child's visual experience with highly generic learning algorithms or do they require strong inductive biases? Recent advances in collecting large-scale, longitudinal, developmentally realistic video datasets and generic self-supervised learning (SSL) algorithms are allowing us to begin to tackle this nature vs. nurture question. However, existing work typically focuses on image-based SSL algorithms and visual capabilities that can be learned from static images (e.g. object recognition), thus ignoring temporal aspects of the world. To close this gap, here we train self-supervised video models on longitudinal, egocentric headcam recordings collected from a child over a two year period in their early development (6-31 months). The resulting models are highly effective at facilitating the learning of action concepts from a small number of labeled examples; they have favorable data size scaling properties; and they display emergent video interpolation capabilities. Video models also learn more robust object representations than image-based models trained with the exact same data. These results suggest that important temporal aspects of a child's internal model of the world may be learnable from their visual experience using highly generic learning algorithms and without strong inductive biases.
Read more7/26/2024

0
A Survey of the Self Supervised Learning Mechanisms for Vision Transformers
Asifullah Khan, Anabia Sohail, Mustansar Fiaz, Mehdi Hassan, Tariq Habib Afridi, Sibghat Ullah Marwat, Farzeen Munir, Safdar Ali, Hannan Naseem, Muhammad Zaigham Zaheer, Kamran Ali, Tangina Sultana, Ziaurrehman Tanoli, Naeem Akhter
Deep supervised learning models require high volume of labeled data to attain sufficiently good results. Although, the practice of gathering and annotating such big data is costly and laborious. Recently, the application of self supervised learning (SSL) in vision tasks has gained significant attention. The intuition behind SSL is to exploit the synchronous relationships within the data as a form of self-supervision, which can be versatile. In the current big data era, most of the data is unlabeled, and the success of SSL thus relies in finding ways to utilize this vast amount of unlabeled data available. Thus it is better for deep learning algorithms to reduce reliance on human supervision and instead focus on self-supervision based on the inherent relationships within the data. With the advent of ViTs, which have achieved remarkable results in computer vision, it is crucial to explore and understand the various SSL mechanisms employed for training these models specifically in scenarios where there is limited labelled data available. In this survey, we develop a comprehensive taxonomy of systematically classifying the SSL techniques based upon their representations and pre-training tasks being applied. Additionally, we discuss the motivations behind SSL, review popular pre-training tasks, and highlight the challenges and advancements in this field. Furthermore, we present a comparative analysis of different SSL methods, evaluate their strengths and limitations, and identify potential avenues for future research.
Read more9/23/2024

0
Self-supervised visual learning in the low-data regime: a comparative evaluation
Sotirios Konstantakos, Despina Ioanna Chalkiadaki, Ioannis Mademlis, Yuki M. Asano, Efstratios Gavves, Georgios Th. Papadopoulos
Self-Supervised Learning (SSL) is a valuable and robust training methodology for contemporary Deep Neural Networks (DNNs), enabling unsupervised pretraining on a `pretext task' that does not require ground-truth labels/annotation. This allows efficient representation learning from massive amounts of unlabeled training data, which in turn leads to increased accuracy in a `downstream task' by exploiting supervised transfer learning. Despite the relatively straightforward conceptualization and applicability of SSL, it is not always feasible to collect and/or to utilize very large pretraining datasets, especially when it comes to real-world application settings. In particular, in cases of specialized and domain-specific application scenarios, it may not be achievable or practical to assemble a relevant image pretraining dataset in the order of millions of instances or it could be computationally infeasible to pretrain at this scale. This motivates an investigation on the effectiveness of common SSL pretext tasks, when the pretraining dataset is of relatively limited/constrained size. In this context, this work introduces a taxonomy of modern visual SSL methods, accompanied by detailed explanations and insights regarding the main categories of approaches, and, subsequently, conducts a thorough comparative experimental evaluation in the low-data regime, targeting to identify: a) what is learnt via low-data SSL pretraining, and b) how do different SSL categories behave in such training scenarios. Interestingly, for domain-specific downstream tasks, in-domain low-data SSL pretraining outperforms the common approach of large-scale pretraining on general datasets. Grounded on the obtained results, valuable insights are highlighted regarding the performance of each category of SSL methods, which in turn suggest straightforward future research directions in the field.
Read more4/29/2024