Semantic Belief Behavior Graph: Enabling Autonomous Robot Inspection in Unknown Environments

0
🧪
Sign in to get full access
Overview
- This paper addresses the challenge of autonomous robotic inspection in complex and unknown environments.
- Existing methods often rely on predefined targets and fail to adapt to dynamic or unknown settings.
- The researchers introduce the Semantic Belief Behavior Graph (SB2G) framework, a novel approach to semantic-aware autonomous robot inspection.
Plain English Explanation
The paper focuses on the problem of enabling robots to inspect their surroundings without needing detailed pre-programmed information about the environment. This capability is important for real-world scenarios like building inspections, where robots need to navigate and identify relevant objects without prior knowledge of the layout.
Existing methods often rely on predefined targets and waypoints, which can't adapt to dynamic or unknown settings. The researchers wanted to develop a more flexible approach that would allow the robot to explore and identify objects for inspection based on their semantic properties, even in unfamiliar environments.
To achieve this, they created the Semantic Belief Behavior Graph (SB2G) framework. This system generates a control policy for the robot, featuring different "behavior nodes" that encapsulate various semantic-based policies designed for inspecting different classes of objects. For example, there might be a behavior node for inspecting electrical panels, another for inspecting windows, and so on.
The robot can then use an active semantic search behavior to locate objects it needs to inspect, while also reducing uncertainty about the semantic information in the environment. The transitions between these different behaviors are encoded in the "edges" of the SB2G graph.
By using this semantic-aware approach, the researchers were able to demonstrate that their SB2G framework enables more efficient inspection policies, with performance comparable to human-operated inspections.
Technical Explanation
The SB2G framework generates a control policy for the robot that features behavior nodes, each of which encapsulates a semantic-based policy for inspecting a particular class of objects. For example, there might be a behavior node for inspecting electrical panels, another for inspecting windows, and so on.
The researchers also designed an active semantic search behavior to guide the robot in locating objects for inspection while reducing semantic information uncertainty. This allows the robot to explore and identify relevant objects without relying on pre-programmed knowledge of the environment.
The edges in the SB2G graph encode the transitions between these different behaviors, providing a structured way for the robot to navigate through the inspection process.
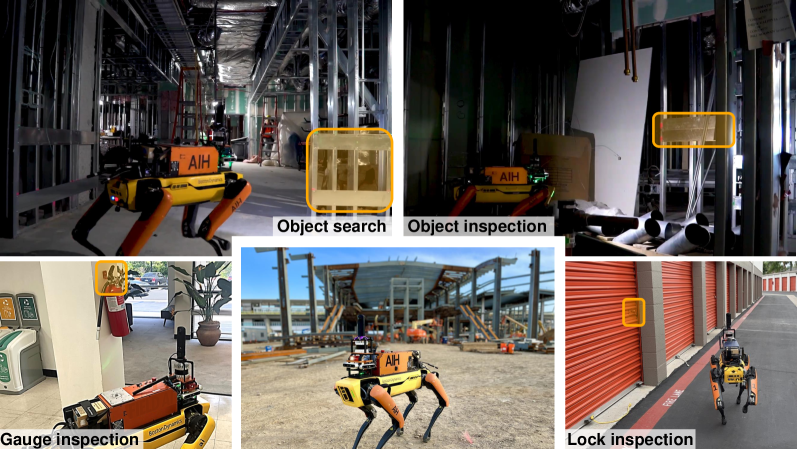
The researchers validated their approach through simulation and real-world urban inspections using a legged robotic platform. Their results show that the SB2G framework enables a more efficient inspection policy, with performance comparable to human-operated inspections.
This work builds on previous research in areas like situational graphs and behavior planning, as well as imitation learning techniques.
Critical Analysis
The paper provides a comprehensive explanation of the SB2G framework and its implementation, including details on the active semantic search behavior and the structure of the behavior nodes and edges. The real-world validation of the approach is also a strength, as it demonstrates the practicality of the system.
However, the paper does not address some potential limitations or areas for further research. For example, it does not discuss how the system would scale to larger or more complex environments, or how it might handle dynamic changes in the environment during the inspection process.
Additionally, while the performance of the SB2G framework is reported to be comparable to human-operated inspections, the paper does not provide a detailed comparison or analysis of the specific advantages and tradeoffs of the autonomous system. A more in-depth discussion of these factors could help readers better understand the practical implications and potential use cases of the technology.
Overall, the SB2G framework represents an interesting and potentially impactful approach to autonomous robotic inspection, but further research and development may be needed to address some of the remaining challenges and limitations.
Conclusion
This paper introduces the Semantic Belief Behavior Graph (SB2G) framework, a novel approach to semantic-aware autonomous robot inspection. The SB2G system generates a control policy for the robot that features behavior nodes designed for inspecting different classes of objects, and an active semantic search behavior to guide the robot in locating relevant objects while reducing uncertainty.
The researchers validated their approach through simulation and real-world urban inspections, demonstrating that the SB2G framework enables more efficient inspection policies compared to existing methods. This work represents an important step forward in enabling robots to conduct autonomous inspections in complex and unknown environments, which could have significant implications for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
Semantic Belief Behavior Graph: Enabling Autonomous Robot Inspection in Unknown Environments
Muhammad Fadhil Ginting, David D. Fan, Sung-Kyun Kim, Mykel J. Kochenderfer, Ali-akbar Agha-mohammadi
This paper addresses the problem of autonomous robotic inspection in complex and unknown environments. This capability is crucial for efficient and precise inspections in various real-world scenarios, even when faced with perceptual uncertainty and lack of prior knowledge of the environment. Existing methods for real-world autonomous inspections typically rely on predefined targets and waypoints and often fail to adapt to dynamic or unknown settings. In this work, we introduce the Semantic Belief Behavior Graph (SB2G) framework as a novel approach to semantic-aware autonomous robot inspection. SB2G generates a control policy for the robot, featuring behavior nodes that encapsulate various semantic-based policies designed for inspecting different classes of objects. We design an active semantic search behavior to guide the robot in locating objects for inspection while reducing semantic information uncertainty. The edges in the SB2G encode transitions between these behaviors. We validate our approach through simulation and real-world urban inspections using a legged robotic platform. Our results show that SB2G enables a more efficient inspection policy, exhibiting performance comparable to human-operated inspections.
Read more7/11/2024
0
SEEK: Semantic Reasoning for Object Goal Navigation in Real World Inspection Tasks
Muhammad Fadhil Ginting, Sung-Kyun Kim, David D. Fan, Matteo Palieri, Mykel J. Kochenderfer, Ali-akbar Agha-Mohammadi
This paper addresses the problem of object-goal navigation in autonomous inspections in real-world environments. Object-goal navigation is crucial to enable effective inspections in various settings, often requiring the robot to identify the target object within a large search space. Current object inspection methods fall short of human efficiency because they typically cannot bootstrap prior and common sense knowledge as humans do. In this paper, we introduce a framework that enables robots to use semantic knowledge from prior spatial configurations of the environment and semantic common sense knowledge. We propose SEEK (Semantic Reasoning for Object Inspection Tasks) that combines semantic prior knowledge with the robot's observations to search for and navigate toward target objects more efficiently. SEEK maintains two representations: a Dynamic Scene Graph (DSG) and a Relational Semantic Network (RSN). The RSN is a compact and practical model that estimates the probability of finding the target object across spatial elements in the DSG. We propose a novel probabilistic planning framework to search for the object using relational semantic knowledge. Our simulation analyses demonstrate that SEEK outperforms the classical planning and Large Language Models (LLMs)-based methods that are examined in this study in terms of efficiency for object-goal inspection tasks. We validated our approach on a physical legged robot in urban environments, showcasing its practicality and effectiveness in real-world inspection scenarios.
Read more5/17/2024

0
An Ontology-based Approach Towards Traceable Behavior Specifications in Automated Driving
Nayel Fabian Salem, Marcus Nolte, Veronica Haber, Till Menzel, Hans Steege, Robert Graubohm, Markus Maurer
Vehicles in public traffic that are equipped with Automated Driving Systems are subject to a number of expectations: Among other aspects, their behavior should be safe, conforming to the rules of the road and provide mobility to their users. This poses challenges for the developers of such systems: Developers are responsible for specifying this behavior, for example, in terms of requirements at system design time. As we will discuss in the article, this specification always involves the need for assumptions and trade-offs. As a result, insufficiencies in such a behavior specification can occur that can potentially lead to unsafe system behavior. In order to support the identification of specification insufficiencies, requirements and respective assumptions need to be made explicit. In this article, we propose the Semantic Norm Behavior Analysis as an ontology-based approach to specify the behavior for an Automated Driving System equipped vehicle. We use ontologies to formally represent specified behavior for a targeted operational environment, and to establish traceability between specified behavior and the addressed stakeholder needs. Furthermore, we illustrate the application of the Semantic Norm Behavior Analysis in two example scenarios and evaluate our results.
Read more9/11/2024
🔍
0
Situational Graphs for Robotic First Responders: an application to dismantling drug labs
W. J. Meijer, A. C. Kemmeren, J. M. van Bruggen, T. Haije, J. E. Fransman, J. D. van Mil
In this work, we support experts in the safety domain with safer dismantling of drug labs, by deploying robots for the initial inspection. Being able to act on the discovered environment is key to enabling this (semi-)autonomous inspection, e.g. to open doors or take a closer at suspicious items. Our approach addresses this with a novel environmental representation, the Behavior-Oriented Situational Graph, where we extend on the classical situational graph by merging a perception-driven backbone with prior actionable knowledge via a situational affordance schema. Linking situations to robot behaviors facilitates both autonomous mission planning and situational understanding of the operator. Planning over the graph is easier and faster, since it directly incorporates actionable information, which is critical for online mission systems. Moreover, the representation allows the human operator to seamlessly transition between different levels of autonomy of the robot, from remote control to behavior execution to full autonomous exploration. We test the effectiveness of our approach in a real-world drug lab scenario at a Dutch police training facility using a mobile Spot robot and use the results to iterate on the system design.
Read more4/29/2024