SEEK: Semantic Reasoning for Object Goal Navigation in Real World Inspection Tasks

0
Sign in to get full access
Overview
- This paper proposes a semantic reasoning approach called SEEK (Semantic Reasoning for Object Goal Navigation) to enable robots to navigate to target objects in real-world inspection tasks.
- The key idea is to leverage semantic understanding of the environment, task context, and the target object to guide the robot's navigation and manipulation.
- SEEK combines computer vision, knowledge representation, and reasoning to enable robots to reason about the semantic relationships between objects and the environment.
Plain English Explanation
The paper presents a system called SEEK that helps robots navigate to and interact with specific objects in the real world. The core idea is to give the robot a deeper understanding of the environment and the task at hand, rather than just relying on basic visual perception.
For example, imagine a robot tasked with inspecting a piece of machinery in a factory. Rather than just using cameras to try to find the machine, the SEEK system allows the robot to reason about the semantic relationships between different objects in the environment. It can understand that the machine is likely located in a certain area of the factory, near other machinery and tools. This higher-level understanding helps the robot plan a more efficient and targeted navigation route to reach the desired object.
SEEK combines computer vision, knowledge representation, and reasoning to enable this type of semantic understanding. By tapping into information about the relationships between objects and their typical placements in the environment, the robot can make more informed decisions about how to move around and where to look for the target object.
This semantic awareness can also help the robot manipulate and interact with the object once it's found, drawing on knowledge about the object's properties and typical uses. Overall, the SEEK system aims to give robots a more contextualized understanding of their surroundings, allowing them to navigate and perform tasks more effectively in complex, real-world environments.
Technical Explanation
The SEEK system combines computer vision, knowledge representation, and reasoning to enable semantic-aware navigation and object interaction for robots in real-world inspection tasks.
Once the robot reaches the target object, it can also leverage the semantic understanding to manipulate and interact with the object more effectively, drawing on knowledge about its properties and typical uses.
Critical Analysis
The paper presents a compelling approach to enabling more intelligent and contextual navigation and interaction for robots in real-world environments. The key strength of SEEK is its ability to combine visual perception with higher-level reasoning about the semantic relationships between objects and the environment.
However, the paper also acknowledges some limitations. For example, the current implementation relies on a pre-built semantic map of the environment, which may not always be available or easy to create. There are also open questions about how well the system would scale to larger, more complex environments with many different objects and relationships.
Additionally, the paper does not provide a detailed evaluation of the system's performance compared to other state-of-the-art approaches for object-goal navigation. Further empirical testing and comparison would help better understand the relative strengths and weaknesses of the SEEK system.
Overall, the SEEK framework represents an interesting and promising step towards more intelligent and adaptable robot behavior in the real world. As the authors note, continued research in this area could lead to significant advancements in the field of robotics and autonomous systems.
Conclusion
The SEEK system proposed in this paper demonstrates how combining computer vision, knowledge representation, and semantic reasoning can enable more intelligent and contextual navigation and interaction for robots in real-world environments. By building an understanding of the relationships between objects and their typical placements, the system allows robots to plan more efficient paths to target objects and interact with them more effectively.
While the current implementation has some limitations, the overall approach represents an exciting step forward in the field of robotics and autonomous systems. As the researchers continue to refine and expand the SEEK framework, it has the potential to significantly improve the capabilities of robots operating in complex, real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SEEK: Semantic Reasoning for Object Goal Navigation in Real World Inspection Tasks
Muhammad Fadhil Ginting, Sung-Kyun Kim, David D. Fan, Matteo Palieri, Mykel J. Kochenderfer, Ali-akbar Agha-Mohammadi
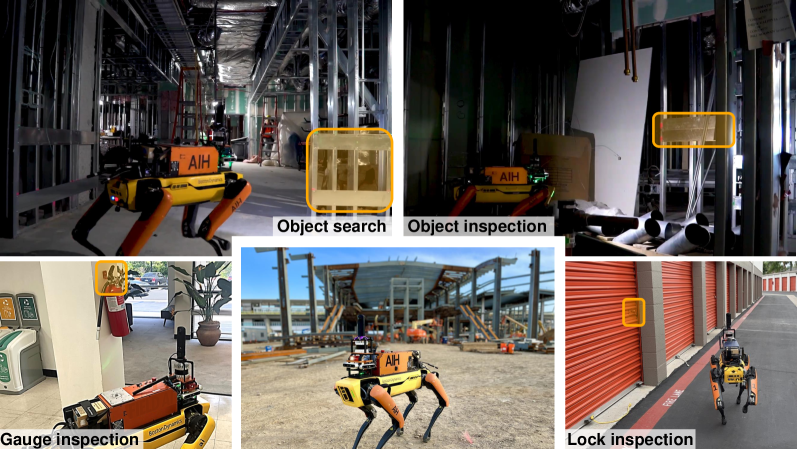
This paper addresses the problem of object-goal navigation in autonomous inspections in real-world environments. Object-goal navigation is crucial to enable effective inspections in various settings, often requiring the robot to identify the target object within a large search space. Current object inspection methods fall short of human efficiency because they typically cannot bootstrap prior and common sense knowledge as humans do. In this paper, we introduce a framework that enables robots to use semantic knowledge from prior spatial configurations of the environment and semantic common sense knowledge. We propose SEEK (Semantic Reasoning for Object Inspection Tasks) that combines semantic prior knowledge with the robot's observations to search for and navigate toward target objects more efficiently. SEEK maintains two representations: a Dynamic Scene Graph (DSG) and a Relational Semantic Network (RSN). The RSN is a compact and practical model that estimates the probability of finding the target object across spatial elements in the DSG. We propose a novel probabilistic planning framework to search for the object using relational semantic knowledge. Our simulation analyses demonstrate that SEEK outperforms the classical planning and Large Language Models (LLMs)-based methods that are examined in this study in terms of efficiency for object-goal inspection tasks. We validated our approach on a physical legged robot in urban environments, showcasing its practicality and effectiveness in real-world inspection scenarios.
Read more5/17/2024
🧪
0
Semantic Belief Behavior Graph: Enabling Autonomous Robot Inspection in Unknown Environments
Muhammad Fadhil Ginting, David D. Fan, Sung-Kyun Kim, Mykel J. Kochenderfer, Ali-akbar Agha-mohammadi
This paper addresses the problem of autonomous robotic inspection in complex and unknown environments. This capability is crucial for efficient and precise inspections in various real-world scenarios, even when faced with perceptual uncertainty and lack of prior knowledge of the environment. Existing methods for real-world autonomous inspections typically rely on predefined targets and waypoints and often fail to adapt to dynamic or unknown settings. In this work, we introduce the Semantic Belief Behavior Graph (SB2G) framework as a novel approach to semantic-aware autonomous robot inspection. SB2G generates a control policy for the robot, featuring behavior nodes that encapsulate various semantic-based policies designed for inspecting different classes of objects. We design an active semantic search behavior to guide the robot in locating objects for inspection while reducing semantic information uncertainty. The edges in the SB2G encode transitions between these behaviors. We validate our approach through simulation and real-world urban inspections using a legged robotic platform. Our results show that SB2G enables a more efficient inspection policy, exhibiting performance comparable to human-operated inspections.
Read more7/11/2024

0
Aligning Knowledge Graph with Visual Perception for Object-goal Navigation
Nuo Xu, Wen Wang, Rong Yang, Mengjie Qin, Zheyuan Lin, Wei Song, Chunlong Zhang, Jason Gu, Chao Li
Object-goal navigation is a challenging task that requires guiding an agent to specific objects based on first-person visual observations. The ability of agent to comprehend its surroundings plays a crucial role in achieving successful object finding. However, existing knowledge-graph-based navigators often rely on discrete categorical one-hot vectors and vote counting strategy to construct graph representation of the scenes, which results in misalignment with visual images. To provide more accurate and coherent scene descriptions and address this misalignment issue, we propose the Aligning Knowledge Graph with Visual Perception (AKGVP) method for object-goal navigation. Technically, our approach introduces continuous modeling of the hierarchical scene architecture and leverages visual-language pre-training to align natural language description with visual perception. The integration of a continuous knowledge graph architecture and multimodal feature alignment empowers the navigator with a remarkable zero-shot navigation capability. We extensively evaluate our method using the AI2-THOR simulator and conduct a series of experiments to demonstrate the effectiveness and efficiency of our navigator. Code available: https://github.com/nuoxu/AKGVP.
Read more4/29/2024
🗣️
0
Semantic-aware Next-Best-View for Multi-DoFs Mobile System in Search-and-Acquisition based Visual Perception
Xiaotong Yu, Chang-Wen Chen
Efficient visual perception using mobile systems is crucial, particularly in unknown environments such as search and rescue operations, where swift and comprehensive perception of objects of interest is essential. In such real-world applications, objects of interest are often situated in complex environments, making the selection of the 'Next Best' view based solely on maximizing visibility gain suboptimal. Semantics, providing a higher-level interpretation of perception, should significantly contribute to the selection of the next viewpoint for various perception tasks. In this study, we formulate a novel information gain that integrates both visibility gain and semantic gain in a unified form to select the semantic-aware Next-Best-View. Additionally, we design an adaptive strategy with termination criterion to support a two-stage search-and-acquisition manoeuvre on multiple objects of interest aided by a multi-degree-of-freedoms (Multi-DoFs) mobile system. Several semantically relevant reconstruction metrics, including perspective directivity and region of interest (ROI)-to-full reconstruction volume ratio, are introduced to evaluate the performance of the proposed approach. Simulation experiments demonstrate the advantages of the proposed approach over existing methods, achieving improvements of up to 27.13% for the ROI-to-full reconstruction volume ratio and a 0.88234 average perspective directivity. Furthermore, the planned motion trajectory exhibits better perceiving coverage toward the target.
Read more4/26/2024