Semantic Gaussians: Open-Vocabulary Scene Understanding with 3D Gaussian Splatting

0

Sign in to get full access
Overview
- Introduces a novel approach called "Semantic Gaussians" for open-vocabulary scene understanding using 3D Gaussian splatting
- Leverages language models to enable flexible and expressive scene representations beyond predefined object categories
- Demonstrates strong performance on various 3D scene understanding tasks compared to prior methods
Plain English Explanation
The paper presents a new technique called "Semantic Gaussians" that aims to improve how computer vision systems understand 3D scenes. Traditional approaches often rely on predefined object categories, which can be limiting.
The key idea behind Semantic Gaussians is to use language models to enable more flexible and expressive scene representations. Instead of just recognizing predefined objects, the system can associate 3D points in the scene with a wide range of semantic concepts described in natural language.
This is achieved through 3D Gaussian splatting, which represents objects as 3D Gaussian distributions rather than discrete bounding boxes or segmentation masks. The system can then match these Gaussian "blobs" to language descriptions to understand the scene contents.
The authors show that this approach outperforms prior methods on various 3D scene understanding tasks, demonstrating its advantages for open-vocabulary scene analysis.
Technical Explanation
The Semantic Gaussians framework consists of two key components:
-
Semantic 3D Gaussian Splatting: This module takes 3D point cloud data as input and associates each 3D point with a Gaussian distribution. The mean and covariance of the Gaussian are predicted using a neural network that encodes the local 3D geometry and appearance features.
-
Language-Guided Scene Understanding: A language model is used to embed text descriptions of scene contents. These text embeddings are then matched to the 3D Gaussian distributions to enable open-vocabulary scene understanding, going beyond predefined object categories.
The authors evaluate their method on various 3D scene understanding tasks, including 3D object detection, semantic segmentation, and scene classification. They demonstrate significant performance improvements over previous state-of-the-art approaches, highlighting the advantages of the Semantic Gaussians approach for flexible and expressive scene representation.
Critical Analysis
The paper presents a compelling approach to open-vocabulary scene understanding, but there are a few potential limitations to consider:
-
The reliance on language models introduces the risk of biases or inconsistencies present in the training data. More research may be needed to understand the robustness of the language-guided scene understanding component.
-
The 3D Gaussian splatting technique, while flexible, may struggle to capture fine-grained details or accurately model complex object shapes. Combining it with other 3D representation methods could be an area for future exploration.
-
The evaluation is primarily focused on indoor scene understanding tasks. Applying the Semantic Gaussians approach to outdoor or large-scale scenes may present additional challenges that were not addressed in this work.
Overall, the Semantic Gaussians framework represents an intriguing step towards more expressive and open-ended 3D scene understanding, with potential for further refinement and development.
Conclusion
The "Semantic Gaussians" approach introduced in this paper offers a novel way to enable open-vocabulary scene understanding using 3D Gaussian splatting and language models. By moving beyond predefined object categories, the system can represent scenes in a more flexible and expressive manner, with demonstrated improvements on various 3D scene understanding tasks.
While the technique has some potential limitations, it represents an exciting direction for advancing the capabilities of computer vision systems to perceive and interpret 3D environments in a more nuanced and language-grounded way. As language models and 3D scene understanding continue to evolve, the Semantic Gaussians framework could pave the way for more intelligent and contextually-aware scene interpretation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Semantic Gaussians: Open-Vocabulary Scene Understanding with 3D Gaussian Splatting
Jun Guo, Xiaojian Ma, Yue Fan, Huaping Liu, Qing Li
Open-vocabulary 3D scene understanding presents a significant challenge in computer vision, with wide-ranging applications in embodied agents and augmented reality systems. Existing methods adopt neurel rendering methods as 3D representations and jointly optimize color and semantic features to achieve rendering and scene understanding simultaneously. In this paper, we introduce Semantic Gaussians, a novel open-vocabulary scene understanding approach based on 3D Gaussian Splatting. Our key idea is to distill knowledge from 2D pre-trained models to 3D Gaussians. Unlike existing methods, we design a versatile projection approach that maps various 2D semantic features from pre-trained image encoders into a novel semantic component of 3D Gaussians, which is based on spatial relationship and need no additional training. We further build a 3D semantic network that directly predicts the semantic component from raw 3D Gaussians for fast inference. The quantitative results on ScanNet segmentation and LERF object localization demonstates the superior performance of our method. Additionally, we explore several applications of Semantic Gaussians including object part segmentation, instance segmentation, scene editing, and spatiotemporal segmentation with better qualitative results over 2D and 3D baselines, highlighting its versatility and effectiveness on supporting diverse downstream tasks.
Read more8/26/2024
0
SA-GS: Semantic-Aware Gaussian Splatting for Large Scene Reconstruction with Geometry Constrain
Butian Xiong, Xiaoyu Ye, Tze Ho Elden Tse, Kai Han, Shuguang Cui, Zhen Li
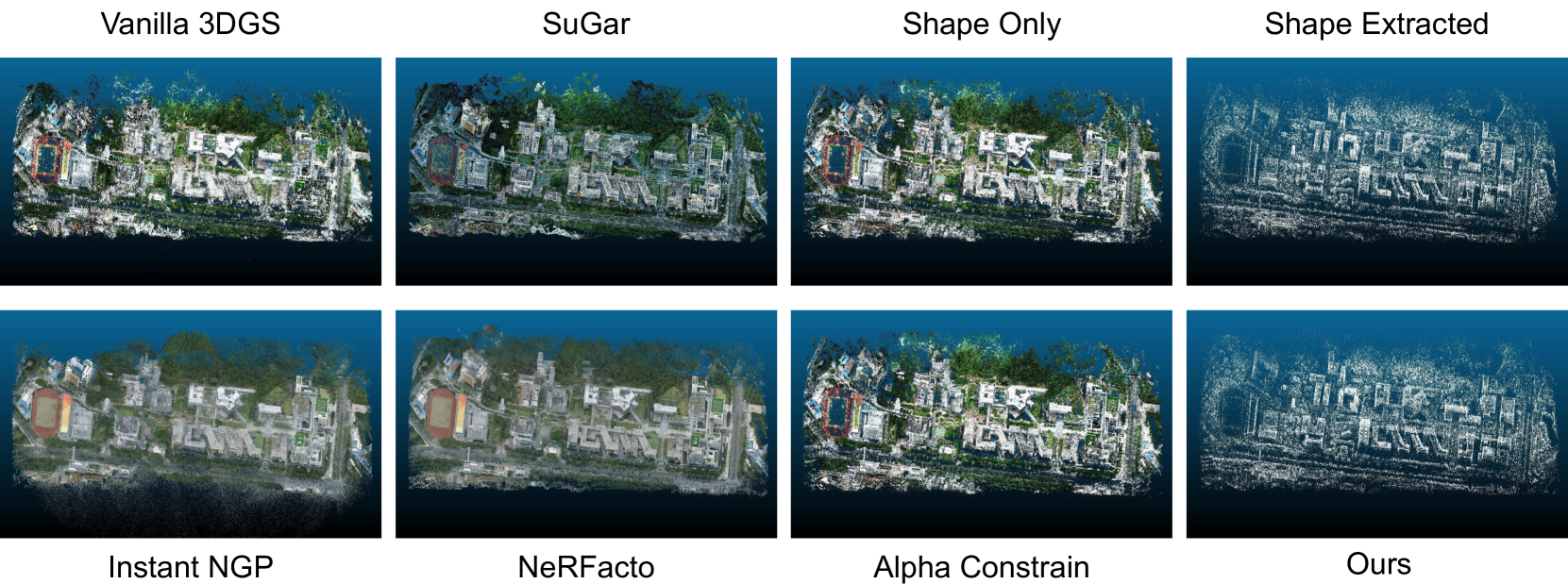
With the emergence of Gaussian Splats, recent efforts have focused on large-scale scene geometric reconstruction. However, most of these efforts either concentrate on memory reduction or spatial space division, neglecting information in the semantic space. In this paper, we propose a novel method, named SA-GS, for fine-grained 3D geometry reconstruction using semantic-aware 3D Gaussian Splats. Specifically, we leverage prior information stored in large vision models such as SAM and DINO to generate semantic masks. We then introduce a geometric complexity measurement function to serve as soft regularization, guiding the shape of each Gaussian Splat within specific semantic areas. Additionally, we present a method that estimates the expected number of Gaussian Splats in different semantic areas, effectively providing a lower bound for Gaussian Splats in these areas. Subsequently, we extract the point cloud using a novel probability density-based extraction method, transforming Gaussian Splats into a point cloud crucial for downstream tasks. Our method also offers the potential for detailed semantic inquiries while maintaining high image-based reconstruction results. We provide extensive experiments on publicly available large-scale scene reconstruction datasets with highly accurate point clouds as ground truth and our novel dataset. Our results demonstrate the superiority of our method over current state-of-the-art Gaussian Splats reconstruction methods by a significant margin in terms of geometric-based measurement metrics. Code and additional results will soon be available on our project page.
Read more5/29/2024

0
SpectralGaussians: Semantic, spectral 3D Gaussian splatting for multi-spectral scene representation, visualization and analysis
Saptarshi Neil Sinha, Holger Graf, Michael Weinmann
We propose a novel cross-spectral rendering framework based on 3D Gaussian Splatting (3DGS) that generates realistic and semantically meaningful splats from registered multi-view spectrum and segmentation maps. This extension enhances the representation of scenes with multiple spectra, providing insights into the underlying materials and segmentation. We introduce an improved physically-based rendering approach for Gaussian splats, estimating reflectance and lights per spectra, thereby enhancing accuracy and realism. In a comprehensive quantitative and qualitative evaluation, we demonstrate the superior performance of our approach with respect to other recent learning-based spectral scene representation approaches (i.e., XNeRF and SpectralNeRF) as well as other non-spectral state-of-the-art learning-based approaches. Our work also demonstrates the potential of spectral scene understanding for precise scene editing techniques like style transfer, inpainting, and removal. Thereby, our contributions address challenges in multi-spectral scene representation, rendering, and editing, offering new possibilities for diverse applications.
Read more8/14/2024

0
OpenGaussian: Towards Point-Level 3D Gaussian-based Open Vocabulary Understanding
Yanmin Wu, Jiarui Meng, Haijie Li, Chenming Wu, Yahao Shi, Xinhua Cheng, Chen Zhao, Haocheng Feng, Errui Ding, Jingdong Wang, Jian Zhang
This paper introduces OpenGaussian, a method based on 3D Gaussian Splatting (3DGS) capable of 3D point-level open vocabulary understanding. Our primary motivation stems from observing that existing 3DGS-based open vocabulary methods mainly focus on 2D pixel-level parsing. These methods struggle with 3D point-level tasks due to weak feature expressiveness and inaccurate 2D-3D feature associations. To ensure robust feature presentation and 3D point-level understanding, we first employ SAM masks without cross-frame associations to train instance features with 3D consistency. These features exhibit both intra-object consistency and inter-object distinction. Then, we propose a two-stage codebook to discretize these features from coarse to fine levels. At the coarse level, we consider the positional information of 3D points to achieve location-based clustering, which is then refined at the fine level. Finally, we introduce an instance-level 3D-2D feature association method that links 3D points to 2D masks, which are further associated with 2D CLIP features. Extensive experiments, including open vocabulary-based 3D object selection, 3D point cloud understanding, click-based 3D object selection, and ablation studies, demonstrate the effectiveness of our proposed method. Project page: https://3d-aigc.github.io/OpenGaussian
Read more6/5/2024