Semi-Supervised Domain Adaptation Using Target-Oriented Domain Augmentation for 3D Object Detection

0
Sign in to get full access
Overview
- This paper presents a semi-supervised domain adaptation method called "Target-Oriented Domain Augmentation" (TODA) for 3D object detection in autonomous driving scenarios.
- The goal is to improve the performance of 3D object detectors on a target domain (e.g., a new driving environment) by leveraging labeled data from a source domain (e.g., a different driving environment) and a small amount of unlabeled target domain data.
- The key idea is to generate synthetic target domain data that is tailored to the specific characteristics of the target environment, which can then be used to fine-tune the 3D object detector.
Plain English Explanation
3D object detection is a crucial task for autonomous vehicles, as it allows them to accurately identify and locate objects in their surroundings, such as other cars, pedestrians, or obstacles. However, training 3D object detectors can be challenging, as they require large amounts of labeled 3D data, which can be expensive and time-consuming to collect.
The authors of this paper propose a solution to this problem. They developed a technique called "Target-Oriented Domain Augmentation" (TODA) that can help improve the performance of 3D object detectors on a new target domain (e.g., a different city or driving environment) by leveraging a small amount of unlabeled target domain data and a larger labeled dataset from a source domain (e.g., a different city or driving environment).
The key idea behind TODA is to generate synthetic target domain data that is tailored to the specific characteristics of the target environment. This synthetic data is then used to fine-tune the 3D object detector, allowing it to better adapt to the target domain without requiring a large amount of labeled target domain data.
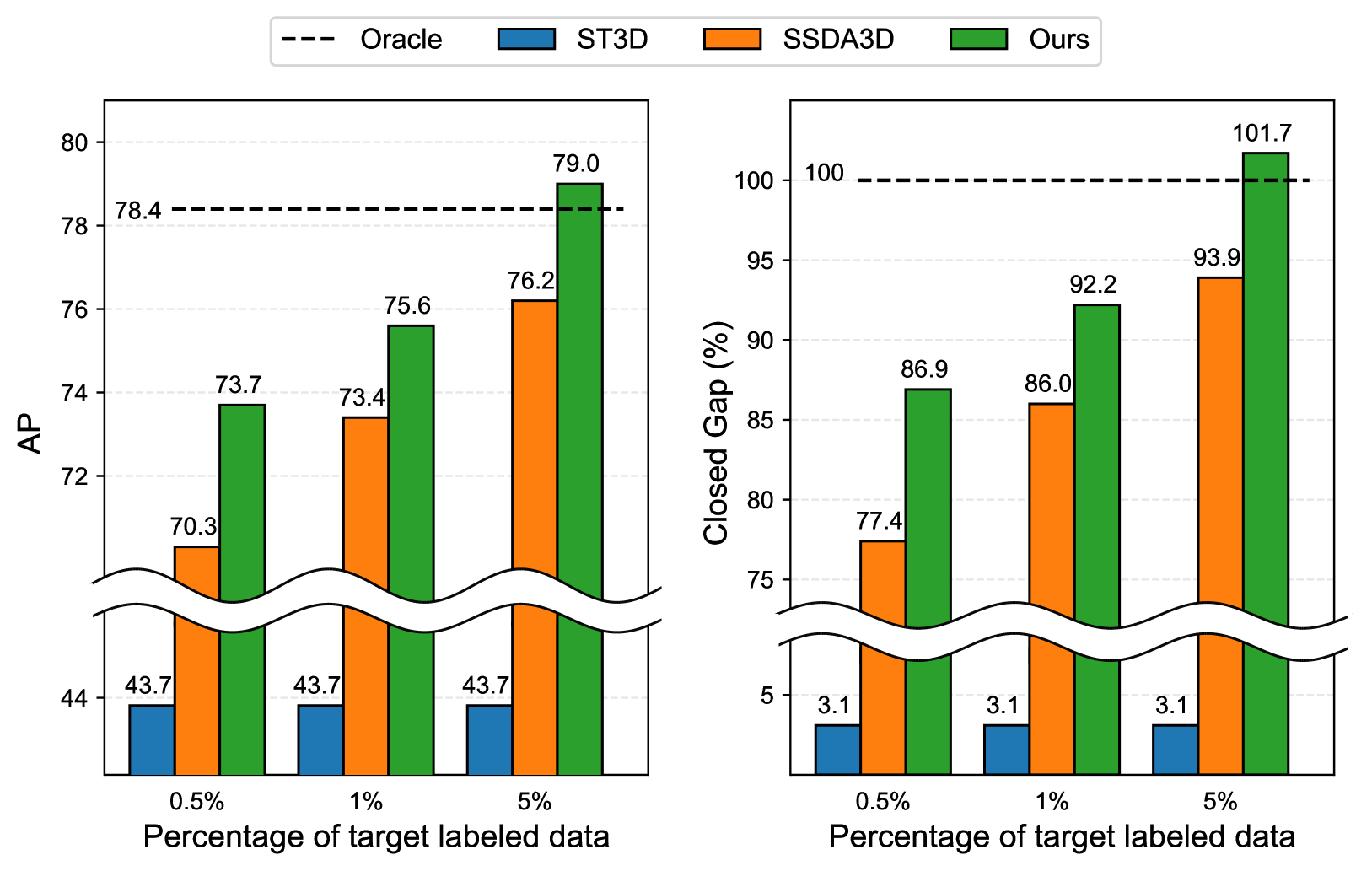
The authors of this paper demonstrate that TODA can significantly improve the performance of 3D object detectors on target domains, compared to other domain adaptation techniques. This is particularly useful for autonomous driving applications, where the driving environment can vary significantly between different locations, and collecting labeled data for each new environment can be costly and time-consuming.
Technical Explanation
The authors propose a semi-supervised domain adaptation approach called "Target-Oriented Domain Augmentation" (TODA) for 3D object detection. The key components of their approach are:
-
Source-to-Target Alignment: The authors first align the source and target domain feature distributions using an adversarial domain adaptation technique, similar to UADA3D.
-
Target-Oriented Data Augmentation: The authors then generate synthetic target domain data that is tailored to the specific characteristics of the target environment. This is achieved by training a conditional generative adversarial network (cGAN) that takes the unlabeled target domain data as input and generates new synthetic samples.
-
Fine-Tuning with Synthetic Data: The authors fine-tune the 3D object detector using a combination of the labeled source domain data and the synthetic target domain data generated by the cGAN. This allows the model to adapt to the target domain without requiring a large amount of labeled target domain data.
The authors evaluate their approach on several 3D object detection benchmarks, including KITTI and Waymo Open Dataset, and demonstrate significant performance improvements over other domain adaptation techniques, especially in the semi-supervised setting where only a small amount of unlabeled target domain data is available.
Critical Analysis
The authors have presented a promising approach for semi-supervised domain adaptation in 3D object detection, which can be particularly useful for autonomous driving applications. However, there are a few potential limitations and areas for further research:
-
Scalability to Diverse Environments: While the authors demonstrate the effectiveness of TODA on a few target domains, it remains to be seen how well the approach would scale to more diverse driving environments with significantly different characteristics.
-
Reliance on Unlabeled Target Data: The TODA approach still requires a small amount of unlabeled target domain data, which may not always be readily available, especially in new or emerging markets.
-
Potential Bias in Synthetic Data: The authors do not explicitly address the potential for bias or distribution shift in the synthetic target domain data generated by the cGAN. This could be an area for further investigation and refinement of the data generation process.
-
Computational Complexity: The training and inference of the TODA approach, including the cGAN and the fine-tuning process, may be computationally intensive, which could be a concern for real-world deployment in autonomous vehicles.
Despite these potential limitations, the authors' work represents an important step forward in addressing the challenge of domain adaptation for 3D object detection, and their findings could have a significant impact on the development of more robust and adaptable autonomous driving systems.
Conclusion
The semi-supervised domain adaptation method proposed in this paper, called "Target-Oriented Domain Augmentation" (TODA), presents a promising approach for improving the performance of 3D object detectors on target domains with limited labeled data. By generating synthetic target domain data that is tailored to the specific characteristics of the target environment, the authors demonstrate significant performance improvements over other domain adaptation techniques.
This research has important implications for the development of autonomous driving systems, where the ability to adapt to diverse driving environments is crucial. While the approach has some potential limitations that warrant further investigation, the authors' work represents an important step forward in addressing the challenge of domain adaptation for 3D object detection.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Semi-Supervised Domain Adaptation Using Target-Oriented Domain Augmentation for 3D Object Detection
Yecheol Kim, Junho Lee, Changsoo Park, Hyoung won Kim, Inho Lim, Christopher Chang, Jun Won Choi
3D object detection is crucial for applications like autonomous driving and robotics. However, in real-world environments, variations in sensor data distribution due to sensor upgrades, weather changes, and geographic differences can adversely affect detection performance. Semi-Supervised Domain Adaptation (SSDA) aims to mitigate these challenges by transferring knowledge from a source domain, abundant in labeled data, to a target domain where labels are scarce. This paper presents a new SSDA method referred to as Target-Oriented Domain Augmentation (TODA) specifically tailored for LiDAR-based 3D object detection. TODA efficiently utilizes all available data, including labeled data in the source domain, and both labeled data and unlabeled data in the target domain to enhance domain adaptation performance. TODA consists of two stages: TargetMix and AdvMix. TargetMix employs mixing augmentation accounting for LiDAR sensor characteristics to facilitate feature alignment between the source-domain and target-domain. AdvMix applies point-wise adversarial augmentation with mixing augmentation, which perturbs the unlabeled data to align the features within both labeled and unlabeled data in the target domain. Our experiments conducted on the challenging domain adaptation tasks demonstrate that TODA outperforms existing domain adaptation techniques designed for 3D object detection by significant margins. The code is available at: https://github.com/rasd3/TODA.
Read more6/18/2024
0
UADA3D: Unsupervised Adversarial Domain Adaptation for 3D Object Detection with Sparse LiDAR and Large Domain Gaps
Maciej K Wozniak, Mattias Hansson, Marko Thiel, Patric Jensfelt
In this study, we address a gap in existing unsupervised domain adaptation approaches on LiDAR-based 3D object detection, which have predominantly concentrated on adapting between established, high-density autonomous driving datasets. We focus on sparser point clouds, capturing scenarios from different perspectives: not just from vehicles on the road but also from mobile robots on sidewalks, which encounter significantly different environmental conditions and sensor configurations. We introduce Unsupervised Adversarial Domain Adaptation for 3D Object Detection (UADA3D). UADA3D does not depend on pre-trained source models or teacher-student architectures. Instead, it uses an adversarial approach to directly learn domain-invariant features. We demonstrate its efficacy in various adaptation scenarios, showing significant improvements in both self-driving car and mobile robot domains. Our code is open-source and will be available soon.
Read more6/13/2024

0
Syn-to-Real Unsupervised Domain Adaptation for Indoor 3D Object Detection
Yunsong Wang, Na Zhao, Gim Hee Lee
The use of synthetic data in indoor 3D object detection offers the potential of greatly reducing the manual labor involved in 3D annotations and training effective zero-shot detectors. However, the complicated domain shifts across syn-to-real indoor datasets remains underexplored. In this paper, we propose a novel Object-wise Hierarchical Domain Alignment (OHDA) framework for syn-to-real unsupervised domain adaptation in indoor 3D object detection. Our approach includes an object-aware augmentation strategy to effectively diversify the source domain data, and we introduce a two-branch adaptation framework consisting of an adversarial training branch and a pseudo labeling branch, in order to simultaneously reach holistic-level and class-level domain alignment. The pseudo labeling is further refined through two proposed schemes specifically designed for indoor UDA. Our adaptation results from synthetic dataset 3D-FRONT to real-world datasets ScanNetV2 and SUN RGB-D demonstrate remarkable mAP25 improvements of 9.7% and 9.1% over Source-Only baselines, respectively, and consistently outperform the methods adapted from 2D and 3D outdoor scenarios. The code will be publicly available upon paper acceptance.
Read more8/27/2024

0
STAL3D: Unsupervised Domain Adaptation for 3D Object Detection via Collaborating Self-Training and Adversarial Learning
Yanan Zhang, Chao Zhou, Di Huang
Existing 3D object detection suffers from expensive annotation costs and poor transferability to unknown data due to the domain gap, Unsupervised Domain Adaptation (UDA) aims to generalize detection models trained in labeled source domains to perform robustly on unexplored target domains, providing a promising solution for cross-domain 3D object detection. Although Self-Training (ST) based cross-domain 3D detection methods with the assistance of pseudo-labeling techniques have achieved remarkable progress, they still face the issue of low-quality pseudo-labels when there are significant domain disparities due to the absence of a process for feature distribution alignment. While Adversarial Learning (AL) based methods can effectively align the feature distributions of the source and target domains, the inability to obtain labels in the target domain forces the adoption of asymmetric optimization losses, resulting in a challenging issue of source domain bias. To overcome these limitations, we propose a novel unsupervised domain adaptation framework for 3D object detection via collaborating ST and AL, dubbed as STAL3D, unleashing the complementary advantages of pseudo labels and feature distribution alignment. Additionally, a Background Suppression Adversarial Learning (BS-AL) module and a Scale Filtering Module (SFM) are designed tailored for 3D cross-domain scenes, effectively alleviating the issues of the large proportion of background interference and source domain size bias. Our STAL3D achieves state-of-the-art performance on multiple cross-domain tasks and even surpasses the Oracle results on Waymo $rightarrow$ KITTI and Waymo $rightarrow$ KITTI-rain.
Read more6/28/2024