Set-membership target search and tracking within an unknown cluttered area using cooperating UAVs equipped with vision systems

0
Sign in to get full access
Overview
- Cooperative target search and tracking in unknown cluttered areas using vision systems on UAVs
- Set-membership approach for robust target detection and tracking
- Model Predictive Control (MPC) used for trajectory planning and control
Plain English Explanation
This research explores a system for using a team of unmanned aerial vehicles (UAVs) equipped with vision systems to search for and track a target within an unknown, cluttered environment. The key innovation is the use of a set-membership approach to make the target detection and tracking more robust to uncertainties in the environment.
Rather than relying on precise models of the environment, the set-membership approach assumes that the true state lies within a known set of possible states. This allows the system to handle unknown obstacles, sensor errors, and other unpredictable factors. Model Predictive Control (MPC) is then used to plan trajectories for the UAVs that can effectively search for and track the target within this uncertain environment.
The researchers demonstrate through simulations that this cooperative approach, combining set-membership state estimation and MPC-based control, can successfully locate and track a target even in cluttered, unknown settings. This could have important applications for search and rescue operations, surveillance, and other scenarios where UAVs need to operate in unstructured environments.
Technical Explanation
The paper presents a framework for set-membership target search and tracking using a team of cooperating UAVs equipped with vision systems. The key technical components are:
-
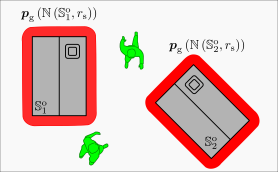
Set-membership state estimation: Rather than relying on precise models of the target and environment, the system uses a set-membership approach to represent the target's state as bounded within a known set of possible states. This makes the estimation more robust to uncertainties.
-
Cooperative multi-UAV control: The UAVs coordinate their search and tracking actions using Model Predictive Control (MPC) to plan optimal trajectories that maximize the probability of detecting and keeping the target within the set-membership state estimate.
-
Vision-based target detection and tracking: Each UAV uses its onboard computer vision system to detect and track the target. The set-membership state estimate is then fused across the team to improve robustness.
The researchers evaluate their approach through extensive simulations, demonstrating its effectiveness at locating and tracking a target in cluttered, unknown environments compared to baseline methods. Key simulation results include high target detection and tracking success rates, as well as the ability to handle sensor errors and unknown obstacles.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed set-membership approach for cooperative target search and tracking. The use of set-membership estimation to handle uncertainty is a notable strength, as it can make the system more robust to real-world challenges.
However, the paper does not discuss the computational complexity of the MPC-based control and how it might scale as the number of UAVs or environment size increases. There are also open questions about the sensitivity of the approach to parameters like the size of the set-membership bounds and the accuracy of the vision-based detection.
Additionally, the paper focuses on simulation results and does not provide any real-world experimental validation. Implementing this system on physical UAV platforms and testing it in realistic environments would be an important next step to demonstrate its practical feasibility and identify any additional challenges.
Conclusion
This research presents a promising approach for using a team of cooperative UAVs equipped with vision systems to search for and track targets in unknown, cluttered environments. By combining set-membership state estimation and MPC-based control, the system can effectively handle the uncertainties inherent in such scenarios.
The simulation results suggest this framework could have valuable applications in search and rescue, surveillance, and other domains where UAVs need to operate autonomously in unstructured settings. Further work is needed to assess the scalability and real-world viability of the approach, but this paper makes a compelling case for the potential of set-membership techniques in cooperative UAV systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!