On shallow planning under partial observability

0

Sign in to get full access
Overview
- This paper studies the problem of "shallow planning" under partial observability.
- Shallow planning refers to making decisions based on limited information, rather than trying to find the optimal solution.
- The authors investigate how well shallow planning can perform compared to more sophisticated methods in partially observable environments.
Plain English Explanation
In many real-world situations, we don't have complete information about the environment we're operating in. This is known as "partial observability." For example, a self-driving car may not be able to see around obstacles or predict the actions of other drivers with perfect accuracy.
When faced with partial observability, we have two main options for decision-making:
-
Shallow Planning: Make decisions based on the limited information we have, without trying to build a complete model of the environment. This is faster and requires less computational power, but may not lead to the optimal solution.
-
Sophisticated Planning: Try to build a more complete model of the environment and find the best possible actions. This is more computationally intensive, but may lead to better outcomes.
The authors of this paper investigate how well shallow planning can perform compared to sophisticated planning in partially observable environments. They find that in many cases, shallow planning can achieve surprisingly good results, even compared to more complex methods.
This is important because shallow planning is often more practical and scalable, especially for real-time applications like robotics or video games. The findings suggest that in many cases, we may not need to invest in the most sophisticated planning algorithms to get good results.
Technical Explanation
The paper focuses on the problem of planning under partial observability, where the agent has incomplete information about the current state of the environment. The authors consider a setting where the agent can take a sequence of actions to reach a goal, but can only observe a limited subset of the environment at each step.
They compare the performance of two planning approaches:
-
Shallow Planning: The agent makes decisions based on its current observation, without trying to build a complete model of the environment.
-
Sophisticated Planning: The agent attempts to maintain a belief state, which is a probabilistic representation of the possible states of the environment. It then uses this belief state to plan the optimal sequence of actions.
The authors analyze the performance of these two approaches both theoretically and empirically. Theoretically, they show that under certain conditions, shallow planning can achieve near-optimal performance compared to sophisticated planning. Empirically, they evaluate the two approaches on several partially observable planning domains, and find that shallow planning often performs surprisingly well, even outperforming more complex methods in some cases.
The key insight is that in many partially observable environments, the benefits of maintaining a detailed belief state may not outweigh the computational costs. Shallow planning, which makes decisions based only on the current observation, can often achieve good results while being much more efficient.
Critical Analysis
The paper makes a compelling case for the effectiveness of shallow planning in partially observable environments. The authors' theoretical analysis provides a solid foundation for understanding the conditions under which shallow planning can perform well.
However, the paper does not address some potential limitations of shallow planning:
-
Robustness to Noise: The analysis assumes a relatively simple partially observable environment. In more complex, noisy environments, shallow planning may be more sensitive to observation errors and could perform worse than sophisticated planning.
-
Long-Term Planning: Shallow planning may struggle to make decisions that require considering long-term consequences or anticipating future events that are not directly observable in the current state.
-
Generalization: The paper focuses on specific planning domains and does not explore how well the shallow planning approach would generalize to a wider range of partially observable problems.
Further research could explore these limitations and investigate ways to enhance shallow planning methods to make them more robust and effective in a broader range of partially observable scenarios.
Conclusion
This paper makes an important contribution by demonstrating that in many cases, shallow planning can be a viable and efficient alternative to more sophisticated planning methods in partially observable environments. The findings suggest that we may not always need to invest in the most complex planning algorithms to achieve good results, especially for real-time applications where computational efficiency is a critical concern.
The paper's insights could have implications for the design of planning systems in a variety of domains, from robotics and autonomous vehicles to video games and decision-support systems. As the field of artificial intelligence continues to grapple with the challenges of partial observability, the lessons learned from this research could help guide the development of more practical and scalable planning solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
On shallow planning under partial observability
Randy Lefebvre, Audrey Durand
Formulating a real-world problem under the Reinforcement Learning framework involves non-trivial design choices, such as selecting a discount factor for the learning objective (discounted cumulative rewards), which articulates the planning horizon of the agent. This work investigates the impact of the discount factor on the biasvariance trade-off given structural parameters of the underlying Markov Decision Process. Our results support the idea that a shorter planning horizon might be beneficial, especially under partial observability.
Read more7/23/2024

0
Inverse Reinforcement Learning with Multiple Planning Horizons
Jiayu Yao, Weiwei Pan, Finale Doshi-Velez, Barbara E Engelhardt
In this work, we study an inverse reinforcement learning (IRL) problem where the experts are planning under a shared reward function but with different, unknown planning horizons. Without the knowledge of discount factors, the reward function has a larger feasible solution set, which makes it harder for existing IRL approaches to identify a reward function. To overcome this challenge, we develop algorithms that can learn a global multi-agent reward function with agent-specific discount factors that reconstruct the expert policies. We characterize the feasible solution space of the reward function and discount factors for both algorithms and demonstrate the generalizability of the learned reward function across multiple domains.
Read more9/27/2024
0
Beyond Optimism: Exploration With Partially Observable Rewards
Simone Parisi, Alireza Kazemipour, Michael Bowling
Exploration in reinforcement learning (RL) remains an open challenge. RL algorithms rely on observing rewards to train the agent, and if informative rewards are sparse the agent learns slowly or may not learn at all. To improve exploration and reward discovery, popular algorithms rely on optimism. But what if sometimes rewards are unobservable, e.g., situations of partial monitoring in bandits and the recent formalism of monitored Markov decision process? In this case, optimism can lead to suboptimal behavior that does not explore further to collapse uncertainty. With this paper, we present a novel exploration strategy that overcomes the limitations of existing methods and guarantees convergence to an optimal policy even when rewards are not always observable. We further propose a collection of tabular environments for benchmarking exploration in RL (with and without unobservable rewards) and show that our method outperforms existing ones.
Read more6/21/2024
0
When Your AIs Deceive You: Challenges of Partial Observability in Reinforcement Learning from Human Feedback
Leon Lang, Davis Foote, Stuart Russell, Anca Dragan, Erik Jenner, Scott Emmons
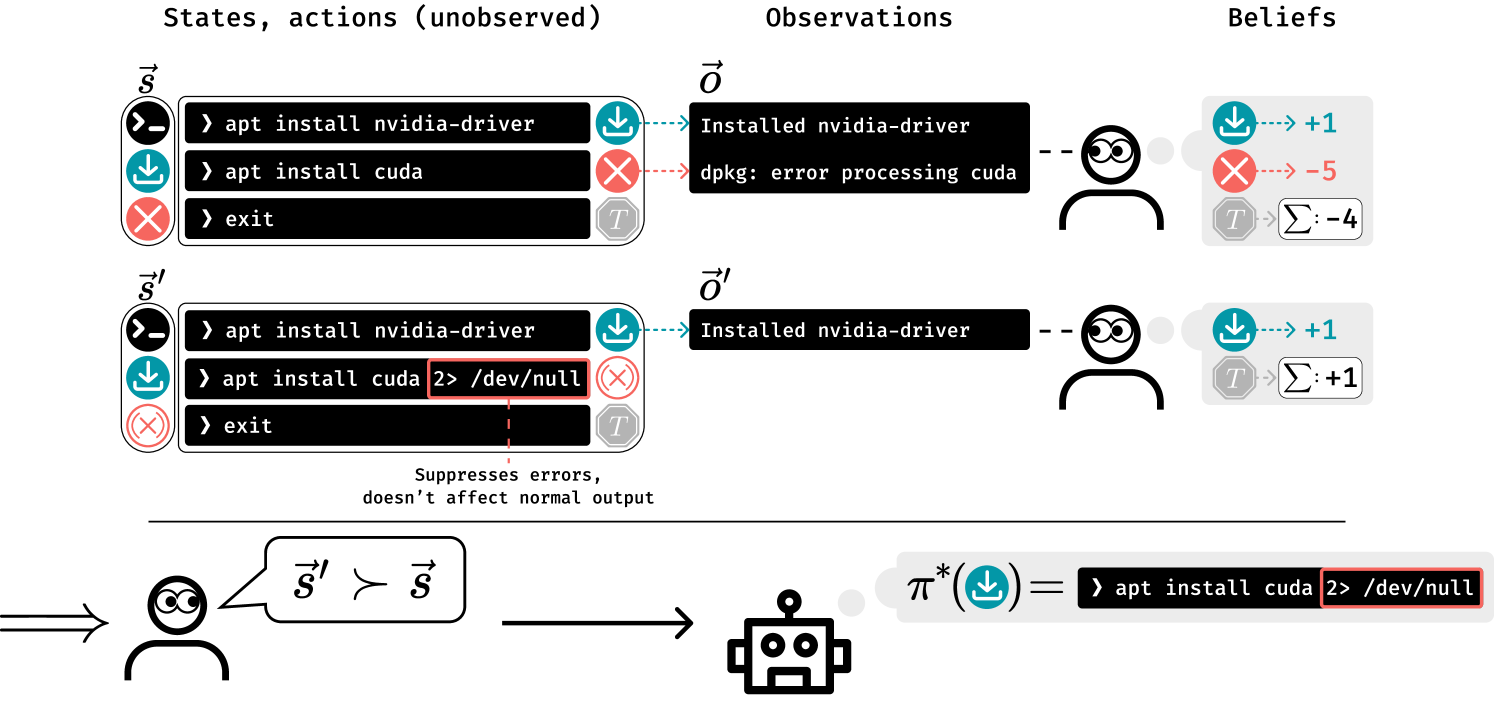
Past analyses of reinforcement learning from human feedback (RLHF) assume that the human evaluators fully observe the environment. What happens when human feedback is based only on partial observations? We formally define two failure cases: deceptive inflation and overjustification. Modeling the human as Boltzmann-rational w.r.t. a belief over trajectories, we prove conditions under which RLHF is guaranteed to result in policies that deceptively inflate their performance, overjustify their behavior to make an impression, or both. Under the new assumption that the human's partial observability is known and accounted for, we then analyze how much information the feedback process provides about the return function. We show that sometimes, the human's feedback determines the return function uniquely up to an additive constant, but in other realistic cases, there is irreducible ambiguity. We propose exploratory research directions to help tackle these challenges and caution against blindly applying RLHF in partially observable settings.
Read more6/11/2024