Beyond Optimism: Exploration With Partially Observable Rewards
2406.13909
0
0
Abstract
Exploration in reinforcement learning (RL) remains an open challenge. RL algorithms rely on observing rewards to train the agent, and if informative rewards are sparse the agent learns slowly or may not learn at all. To improve exploration and reward discovery, popular algorithms rely on optimism. But what if sometimes rewards are unobservable, e.g., situations of partial monitoring in bandits and the recent formalism of monitored Markov decision process? In this case, optimism can lead to suboptimal behavior that does not explore further to collapse uncertainty. With this paper, we present a novel exploration strategy that overcomes the limitations of existing methods and guarantees convergence to an optimal policy even when rewards are not always observable. We further propose a collection of tabular environments for benchmarking exploration in RL (with and without unobservable rewards) and show that our method outperforms existing ones.
Create account to get full access
Overview
- This paper explores exploration strategies in reinforcement learning (RL) problems with partially observable rewards.
- It introduces a new approach called "Optimism Beyond Optimism" (OBO) that aims to improve exploration in these challenging scenarios.
- The paper analyzes the theoretical guarantees of OBO and compares its performance to other state-of-the-art exploration methods.
Plain English Explanation
Reinforcement learning (RL) is a type of machine learning where an agent learns to make decisions by interacting with an environment and receiving rewards or penalties. In many real-world RL problems, the agent may not have complete information about the environment, a situation known as partial observability.
This paper focuses on the challenge of exploration in partially observable RL environments. Exploration is the process of the agent actively trying to learn more about the environment, rather than just exploiting what it already knows. The authors argue that traditional "optimistic" exploration strategies, which assume the best-case scenario, may not be sufficient in partially observable settings.
To address this, the paper introduces a new approach called "Optimism Beyond Optimism" (OBO). OBO aims to strike a balance between exploration and exploitation, taking into account the agent's uncertainty about the environment. The authors provide theoretical guarantees for the performance of OBO and compare it to other state-of-the-art exploration methods using various experiments.
The key insight of this work is that in partially observable environments, the agent needs to go beyond simple optimism and consider the broader range of possible outcomes. By doing so, the agent can make more informed decisions and ultimately learn more effectively.
Technical Explanation
The paper formulates the problem of reinforcement learning in partially observable Markov decision processes (POMDPs), where the agent's observations provide incomplete information about the true state of the environment. The authors introduce the "Optimism Beyond Optimism" (OBO) algorithm, which extends the concept of "optimism in the face of uncertainty" to better handle the challenges of partial observability.
In contrast to standard optimistic exploration methods that assume the best-case scenario, OBO considers a broader range of possible outcomes based on the agent's current knowledge. This is achieved by maintaining a set of plausible environments (or "models") that are consistent with the agent's observations. The agent then selects actions that maximize the expected return across this set of models, rather than just the single most optimistic model.
The paper provides a regret analysis of the OBO algorithm, proving that it achieves near-optimal performance in terms of the cumulative reward obtained by the agent. The authors also compare OBO to other state-of-the-art exploration methods, such as minimax-optimal-reward-agnostic-exploration-reinforcement-learning, reinforcement-learning-lookahead-information, and provable-representation-efficient-planning-partial-observable-reinforcement, using both synthetic and real-world environments.
Critical Analysis
The paper presents a compelling approach to exploration in partially observable reinforcement learning environments. The authors' insights about the limitations of traditional optimistic exploration methods and the need for a more nuanced consideration of uncertainty are valuable contributions to the field.
However, the paper does acknowledge some potential limitations. For example, the theoretical analysis assumes the agent has access to a generative model of the environment, which may not always be the case in real-world applications. Additionally, the computational complexity of maintaining a set of plausible models could be a challenge in large-scale problems, and the authors note that further research is needed to address this.
Another area for further investigation is the interplay between the agent's belief about the environment and its exploration strategy. The when-your-ais-deceive-you-challenges-partial paper, for instance, highlights the potential challenges when an agent's beliefs about the environment do not align with reality.
Finally, the efficient-reinforcement-learning-via-decoupling-exploration-utilization work suggests that decoupling exploration and exploitation can be beneficial in certain scenarios, which could be an interesting direction to explore in the context of partially observable environments.
Conclusion
This paper introduces a novel exploration strategy called "Optimism Beyond Optimism" (OBO) for reinforcement learning in partially observable environments. By considering a broader range of possible outcomes, OBO aims to strike a better balance between exploration and exploitation compared to traditional optimistic methods.
The theoretical and empirical results presented in the paper demonstrate the effectiveness of OBO and its potential to advance the state of the art in this challenging domain. While the approach has some limitations that warrant further investigation, the key insights and the proposed solution are valuable contributions to the field of reinforcement learning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Minimax-Optimal Reward-Agnostic Exploration in Reinforcement Learning
Gen Li, Yuling Yan, Yuxin Chen, Jianqing Fan
0
0
This paper studies reward-agnostic exploration in reinforcement learning (RL) -- a scenario where the learner is unware of the reward functions during the exploration stage -- and designs an algorithm that improves over the state of the art. More precisely, consider a finite-horizon inhomogeneous Markov decision process with $S$ states, $A$ actions, and horizon length $H$, and suppose that there are no more than a polynomial number of given reward functions of interest. By collecting an order of begin{align*} frac{SAH^3}{varepsilon^2} text{ sample episodes (up to log factor)} end{align*} without guidance of the reward information, our algorithm is able to find $varepsilon$-optimal policies for all these reward functions, provided that $varepsilon$ is sufficiently small. This forms the first reward-agnostic exploration scheme in this context that achieves provable minimax optimality. Furthermore, once the sample size exceeds $frac{S^2AH^3}{varepsilon^2}$ episodes (up to log factor), our algorithm is able to yield $varepsilon$ accuracy for arbitrarily many reward functions (even when they are adversarially designed), a task commonly dubbed as ``reward-free exploration.'' The novelty of our algorithm design draws on insights from offline RL: the exploration scheme attempts to maximize a critical reward-agnostic quantity that dictates the performance of offline RL, while the policy learning paradigm leverages ideas from sample-optimal offline RL paradigms.
5/24/2024
🏅
Reinforcement Learning with Lookahead Information
Nadav Merlis
0
0
We study reinforcement learning (RL) problems in which agents observe the reward or transition realizations at their current state before deciding which action to take. Such observations are available in many applications, including transactions, navigation and more. When the environment is known, previous work shows that this lookahead information can drastically increase the collected reward. However, outside of specific applications, existing approaches for interacting with unknown environments are not well-adapted to these observations. In this work, we close this gap and design provably-efficient learning algorithms able to incorporate lookahead information. To achieve this, we perform planning using the empirical distribution of the reward and transition observations, in contrast to vanilla approaches that only rely on estimated expectations. We prove that our algorithms achieve tight regret versus a baseline that also has access to lookahead information - linearly increasing the amount of collected reward compared to agents that cannot handle lookahead information.
6/5/2024
When Your AIs Deceive You: Challenges of Partial Observability in Reinforcement Learning from Human Feedback
Leon Lang, Davis Foote, Stuart Russell, Anca Dragan, Erik Jenner, Scott Emmons
0
0
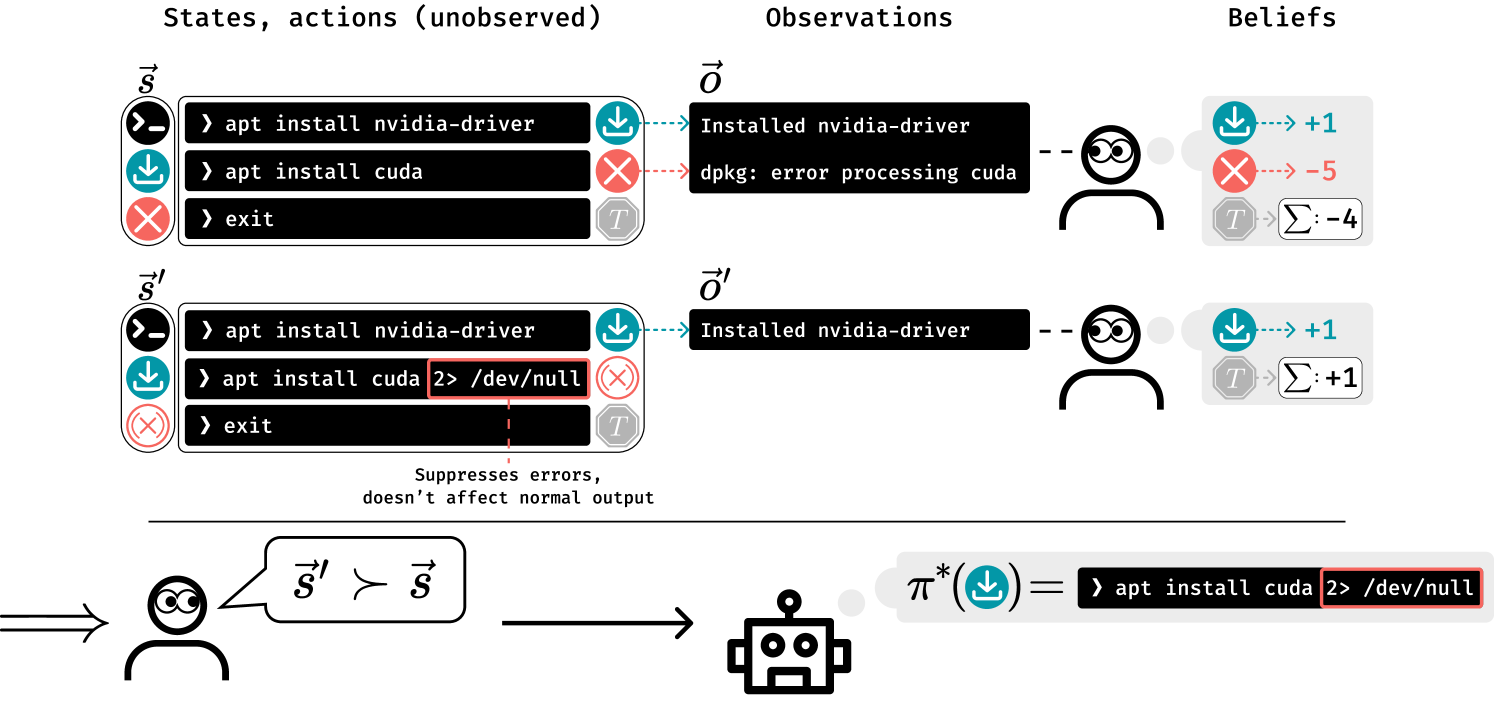
Past analyses of reinforcement learning from human feedback (RLHF) assume that the human evaluators fully observe the environment. What happens when human feedback is based only on partial observations? We formally define two failure cases: deceptive inflation and overjustification. Modeling the human as Boltzmann-rational w.r.t. a belief over trajectories, we prove conditions under which RLHF is guaranteed to result in policies that deceptively inflate their performance, overjustify their behavior to make an impression, or both. Under the new assumption that the human's partial observability is known and accounted for, we then analyze how much information the feedback process provides about the return function. We show that sometimes, the human's feedback determines the return function uniquely up to an additive constant, but in other realistic cases, there is irreducible ambiguity. We propose exploratory research directions to help tackle these challenges and caution against blindly applying RLHF in partially observable settings.
6/11/2024
🏅
Provable Representation with Efficient Planning for Partial Observable Reinforcement Learning
Hongming Zhang, Tongzheng Ren, Chenjun Xiao, Dale Schuurmans, Bo Dai
0
0
In most real-world reinforcement learning applications, state information is only partially observable, which breaks the Markov decision process assumption and leads to inferior performance for algorithms that conflate observations with state. Partially Observable Markov Decision Processes (POMDPs), on the other hand, provide a general framework that allows for partial observability to be accounted for in learning, exploration and planning, but presents significant computational and statistical challenges. To address these difficulties, we develop a representation-based perspective that leads to a coherent framework and tractable algorithmic approach for practical reinforcement learning from partial observations. We provide a theoretical analysis for justifying the statistical efficiency of the proposed algorithm, and also empirically demonstrate the proposed algorithm can surpass state-of-the-art performance with partial observations across various benchmarks, advancing reliable reinforcement learning towards more practical applications.
6/12/2024