SHINE: Social Homology Identification for Navigation in Crowded Environments
2404.16705
0
0

Abstract
Navigating mobile robots in social environments remains a challenging task due to the intricacies of human-robot interactions. Most of the motion planners designed for crowded and dynamic environments focus on choosing the best velocity to reach the goal while avoiding collisions, but do not explicitly consider the high-level navigation behavior (avoiding through the left or right side, letting others pass or passing before others, etc.). In this work, we present a novel motion planner that incorporates topology distinct paths representing diverse navigation strategies around humans. The planner selects the topology class that imitates human behavior the best using a deep neural network model trained on real-world human motion data, ensuring socially intelligent and contextually aware navigation. Our system refines the chosen path through an optimization-based local planner in real time, ensuring seamless adherence to desired social behaviors. In this way, we decouple perception and local planning from the decision-making process. We evaluate the prediction accuracy of the network with real-world data. In addition, we assess the navigation capabilities in both simulation and a real-world platform, comparing it with other state-of-the-art planners. We demonstrate that our planner exhibits socially desirable behaviors and shows a smooth and remarkable performance.
Create account to get full access
Overview
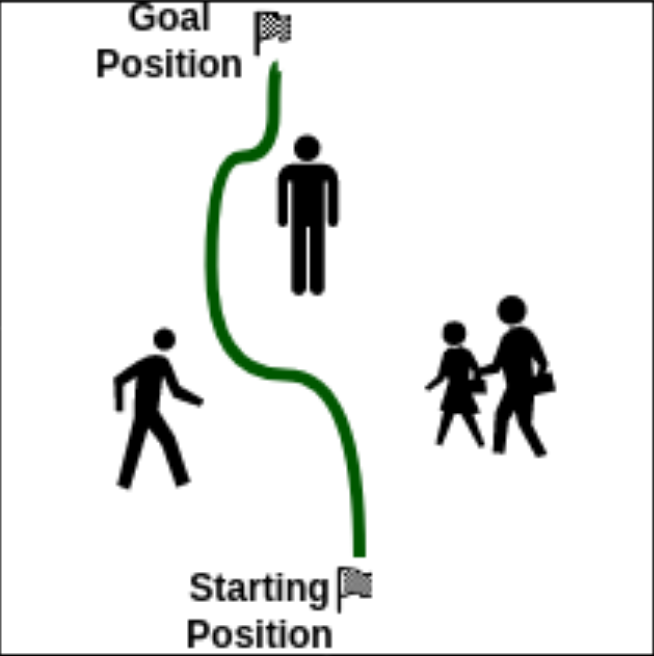
- Presents a new approach called SHINE (Social Homology Identification for Navigation in Crowded Environments) for robot navigation in crowded environments
- Leverages the concept of "social homology" to identify and follow human movement patterns
- Aims to enable robots to navigate efficiently and safely in crowded spaces by anticipating and adapting to human behavior
Plain English Explanation
SHINE is a new approach that helps robots navigate crowded environments more effectively. The key idea is to identify and follow the "social homology" - the common patterns of how people move and behave in a given space. By understanding these social cues, the robots can anticipate human movements and adapt their own navigation accordingly.
For example, imagine a busy train station where people tend to naturally form lines and queues to board trains. A robot using SHINE would recognize these social homologies and follow the flow of human traffic, rather than trying to cut through the crowd in a disruptive way. This allows the robot to move through the space more efficiently and safely, without interfering with or colliding with the people around it.
Technical Explanation
The SHINE paper proposes a novel approach for robot navigation in crowded environments. The key innovation is the concept of "social homology" - identifying the common patterns and structures in how humans move and interact within a given space.
The SHINE system uses machine learning to observe and model these social homologies, such as the formation of lines, queues, and other collective human behaviors. It then uses this understanding to plan and execute navigation strategies that anticipate and adapt to the predicted movements of people in the environment.
This is in contrast to traditional robot navigation approaches that tend to treat humans as obstacles to be avoided, rather than dynamic agents whose behavior can be understood and leveraged. By embracing the social context, the SHINE system is able to navigate crowded spaces more efficiently and with less disruption to the humans around it.
The paper presents experiments demonstrating the advantages of the SHINE approach compared to other state-of-the-art robot navigation methods, both in simulation and real-world environments. The results show significant improvements in measures like travel time, collisions, and overall fluency of navigation.
Critical Analysis
The SHINE paper provides a compelling and well-executed approach to the challenge of robot navigation in crowded spaces. By incorporating models of social homology, the system represents a significant advance over more traditional navigation methods that treat humans as static obstacles.
However, the paper does acknowledge some limitations and areas for further research. For instance, the current SHINE implementation relies on the ability to accurately detect and track individual humans in the environment, which can be technically challenging in dense, dynamic crowds.
Additionally, the paper notes that the social homology models are trained on specific environments and may not generalize well to completely novel settings. Further research would be needed to explore techniques for rapidly adapting the system to new contexts.
Overall, the SHINE approach represents an important step forward in enabling more natural and fluent robot navigation in crowded public spaces. As this technology continues to develop, it could have significant implications for applications like interactive robot assistants or autonomous delivery systems.
Conclusion
The SHINE system presents a novel approach to robot navigation in crowded environments that leverages the concept of "social homology" - the common patterns and structures of human movement and interaction. By modeling these social cues, the SHINE system is able to plan and execute navigation strategies that are more efficient, safe, and aligned with human behavior.
The paper's experimental results demonstrate the advantages of this approach over traditional robot navigation methods. While there are some limitations that require further research, the SHINE system represents an important step forward in enabling robots to navigate crowded public spaces in a more natural and fluent way.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Learning Strategies For Successful Crowd Navigation
Rajshree Daulatabad, Serena Nath
0
0
Teaching autonomous mobile robots to successfully navigate human crowds is a challenging task. Not only does it require planning, but it requires maintaining social norms which may differ from one context to another. Here we focus on crowd navigation, using a neural network to learn specific strategies in-situ with a robot. This allows us to take into account human behavior and reactions toward a real robot as well as learn strategies that are specific to various scenarios in that context. A CNN takes a top-down image of the scene as input and outputs the next action for the robot to take in terms of speed and angle. Here we present the method, experimental results, and quantitatively evaluate our approach.
4/11/2024
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
0
0
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
5/3/2024

Follow me: an architecture for user identification and social navigation with a mobile robot
Andrea Ruo, Lorenzo Sabattini, Valeria Villani
0
0
Over the past decade, a multitude of service robots have been developed to fulfill a wide range of practical purposes. Notably, roles such as reception and robotic guidance have garnered extensive popularity. In these positions, robots are progressively assuming the responsibilities traditionally held by human staff in assisting customers. Ensuring the safe and socially acceptable operation of robots in such environments poses a fundamental challenge within the context of Socially Responsible Navigation (SRN). This article presents an architecture for user identification and social navigation with a mobile robot that employs computer vision, machine learning, and artificial intelligence algorithms to identify and guide users in a social navigation context, thereby providing an intuitive and user-friendly experience with the robot.
5/3/2024

Adaptive Social Force Window Planner with Reinforcement Learning
Mauro Martini, No'e P'erez-Higueras, Andrea Ostuni, Marcello Chiaberge, Fernando Caballero, Luis Merino
0
0
Human-aware navigation is a complex task for mobile robots, requiring an autonomous navigation system capable of achieving efficient path planning together with socially compliant behaviors. Social planners usually add costs or constraints to the objective function, leading to intricate tuning processes or tailoring the solution to the specific social scenario. Machine Learning can enhance planners' versatility and help them learn complex social behaviors from data. This work proposes an adaptive social planner, using a Deep Reinforcement Learning agent to dynamically adjust the weighting parameters of the cost function used to evaluate trajectories. The resulting planner combines the robustness of the classic Dynamic Window Approach, integrated with a social cost based on the Social Force Model, and the flexibility of learning methods to boost the overall performance on social navigation tasks. Our extensive experimentation on different environments demonstrates the general advantage of the proposed method over static cost planners.
4/23/2024