Legible and Proactive Robot Planning for Prosocial Human-Robot Interactions
2404.03734
0
0
Abstract
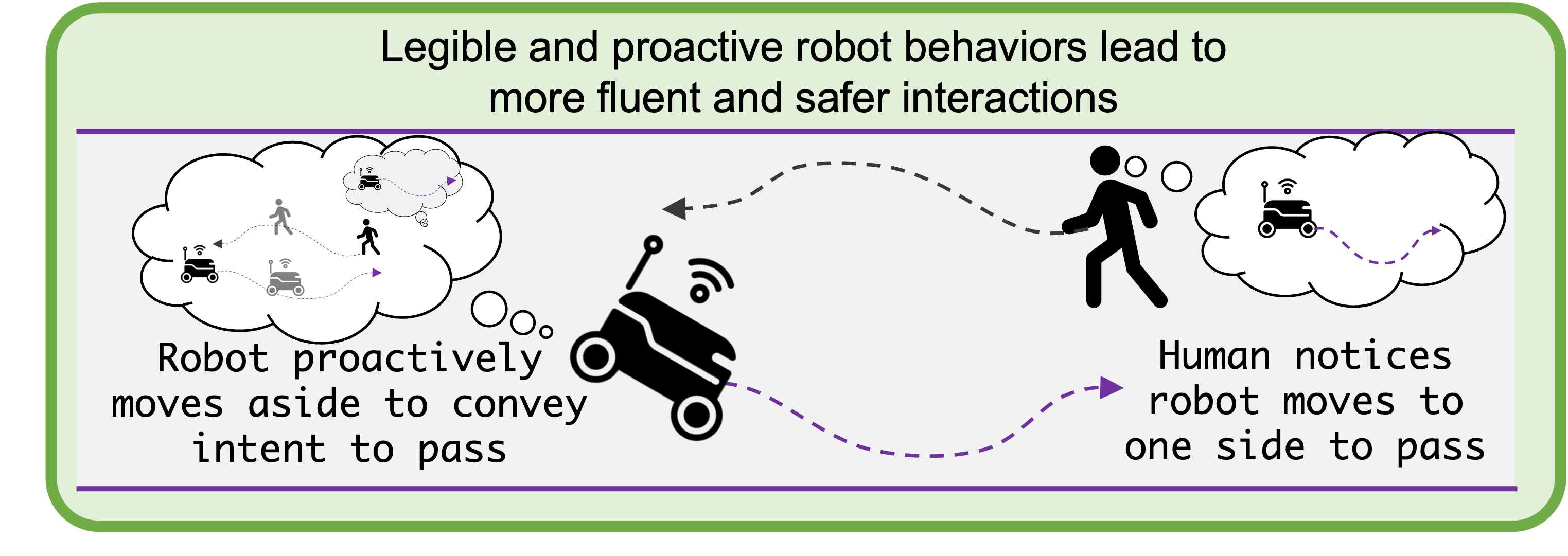
Humans have a remarkable ability to fluently engage in joint collision avoidance in crowded navigation tasks despite the complexities and uncertainties inherent in human behavior. Underlying these interactions is a mutual understanding that (i) individuals are prosocial, that is, there is equitable responsibility in avoiding collisions, and (ii) individuals should behave legibly, that is, move in a way that clearly conveys their intent to reduce ambiguity in how they intend to avoid others. Toward building robots that can safely and seamlessly interact with humans, we propose a general robot trajectory planning framework for synthesizing legible and proactive behaviors and demonstrate that our robot planner naturally leads to prosocial interactions. Specifically, we introduce the notion of a markup factor to incentivize legible and proactive behaviors and an inconvenience budget constraint to ensure equitable collision avoidance responsibility. We evaluate our approach against well-established multi-agent planning algorithms and show that using our approach produces safe, fluent, and prosocial interactions. We demonstrate the real-time feasibility of our approach with human-in-the-loop simulations. Project page can be found at https://uw-ctrl.github.io/phri/.
Create account to get full access
Overview
- This paper presents a framework for robot planning that aims to make robot actions more legible and proactive in human-robot interactions.
- The key goals are to make robot behavior more transparent and aligned with human expectations, ultimately enabling more natural and positive interactions.
- The proposed approach combines techniques like inverse optimal control, intention recognition, and interactive planning to achieve these objectives.
Plain English Explanation
The paper focuses on making robots better at interacting with humans in a natural and intuitive way. Current robots can sometimes seem unpredictable or unclear in their actions, which can be confusing or even frustrating for people. The researchers wanted to develop a new framework to address this.
The core idea is to make robot planning and decision-making more "legible" and "proactive." Legible means the robot's intentions and reasoning are clear and easy for humans to understand. Proactive means the robot anticipates what humans might need or want, and acts accordingly to be helpful.
To achieve this, the framework combines techniques like inverse optimal control, intention recognition, and interactive planning. The goal is for the robot to better understand human goals and preferences, and then plan its actions in a way that is clear, helpful, and aligned with human expectations.
Technical Explanation
The proposed framework consists of three main components:
-
Inverse Optimal Control: This module infers the human's underlying objectives or preferences from observed behavior. By understanding what motivates the human, the robot can then plan actions that are more aligned with those preferences.
-
Intention Recognition: This component uses sensor data and models of human behavior to recognize the human's current intentions or goals. Knowing the human's immediate aims allows the robot to provide more relevant and helpful assistance.
-
Interactive Planning: Finally, the robot uses this understanding of human preferences and intentions to plan its own actions. The goal is to generate robot behavior that is legible (easy for the human to interpret) and proactive (anticipating the human's needs).
The paper presents experiments where the framework is applied to a variety of human-robot interaction scenarios. The results demonstrate improvements in metrics like task efficiency, user satisfaction, and perceived transparency of the robot's behavior compared to baseline approaches.
Critical Analysis
The proposed framework represents a promising direction for enhancing human-robot interactions. By focusing on legibility and proactivity, the approach aims to make robots more intuitive and aligned with human expectations. This is an important step towards more natural, collaborative, and positive interactions.
However, the paper acknowledges several limitations and areas for further research. For example, the framework currently relies on relatively simplistic models of human cognition and behavior. Incorporating more sophisticated psychological models could lead to even more effective intention recognition and preference learning.
Additionally, the experiments were conducted in relatively constrained, laboratory-style settings. Testing the framework in more complex, real-world scenarios would help validate its broader applicability and identify any challenges that may arise.
Future work could also explore how to scale the framework to handle more diverse human-robot interaction contexts, as well as ways to ensure the robot's plans remain transparent and trustworthy even as the complexity of the interactions increases.
Conclusion
Overall, this paper presents an innovative framework for making robot planning and behavior more legible and proactive in human-robot interactions. By combining techniques like inverse optimal control, intention recognition, and interactive planning, the approach aims to enable robots that are more transparent, helpful, and aligned with human expectations.
While further research is needed to address some of the limitations, this work represents an important step towards developing robots that can engage in more natural, cooperative, and prosocial interactions with people. As robots become increasingly prevalent in our lives, such advancements will be crucial for ensuring positive, meaningful, and beneficial human-robot collaborations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Legibot: Generating Legible Motions for Service Robots Using Cost-Based Local Planners
Javad Amirian, Mouad Abrini, Mohamed Chetouani
0
0
With the increasing presence of social robots in various environments and applications, there is an increasing need for these robots to exhibit socially-compliant behaviors. Legible motion, characterized by the ability of a robot to clearly and quickly convey intentions and goals to the individuals in its vicinity, through its motion, holds significant importance in this context. This will improve the overall user experience and acceptance of robots in human environments. In this paper, we introduce a novel approach to incorporate legibility into local motion planning for mobile robots. This can enable robots to generate legible motions in real-time and dynamic environments. To demonstrate the effectiveness of our proposed methodology, we also provide a robotic stack designed for deploying legibility-aware motion planning in a social robot, by integrating perception and localization components.
4/9/2024

Bidirectional Human Interactive AI Framework for Social Robot Navigation
Tuba Girgin, Emre Girgin, Yigit Yildirim, Emre Ugur, Mehmet Haklidir
0
0
Trustworthiness is a crucial concept in the context of human-robot interaction. Cooperative robots must be transparent regarding their decision-making process, especially when operating in a human-oriented environment. This paper presents a comprehensive end-to-end framework aimed at fostering trustworthy bidirectional human-robot interaction in collaborative environments for the social navigation of mobile robots. In this framework, the robot communicates verbally while the human guides with gestures. Our method enables a mobile robot to predict the trajectory of people and adjust its route in a socially-aware manner. In case of conflict between human and robot decisions, detected through visual examination, the route is dynamically modified based on human preference while verbal communication is maintained. We present our pipeline, framework design, and preliminary experiments that form the foundation of our proposition.
5/7/2024
Designing for Fairness in Human-Robot Interactions
Houston Claure
0
0
The foundation of successful human collaboration is deeply rooted in the principles of fairness. As robots are increasingly prevalent in various parts of society where they are working alongside groups and teams of humans, their ability to understand and act according to principles of fairness becomes crucial for their effective integration. This is especially critical when robots are part of multi-human teams, where they must make continuous decisions regarding the allocation of resources. These resources can be material, such as tools, or communicative, such as gaze direction, and must be distributed fairly among team members to ensure optimal team performance and healthy group dynamics. Therefore, our research focuses on understanding how robots can effectively participate within human groups by making fair decisions while contributing positively to group dynamics and outcomes. In this paper, I discuss advances toward ensuring that robots are capable of considering human notions of fairness in their decision-making.
6/3/2024
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
0
0
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
6/10/2024