Learning Strategies For Successful Crowd Navigation
2404.06561
0
0

Abstract
Teaching autonomous mobile robots to successfully navigate human crowds is a challenging task. Not only does it require planning, but it requires maintaining social norms which may differ from one context to another. Here we focus on crowd navigation, using a neural network to learn specific strategies in-situ with a robot. This allows us to take into account human behavior and reactions toward a real robot as well as learn strategies that are specific to various scenarios in that context. A CNN takes a top-down image of the scene as input and outputs the next action for the robot to take in terms of speed and angle. Here we present the method, experimental results, and quantitatively evaluate our approach.
Create account to get full access
Overview
- This paper presents learning strategies for successful crowd navigation, which is an important challenge in robotics and autonomous systems.
- The researchers explore various techniques to enable robots to navigate through dense crowds of people effectively and safely.
- The methods involve leveraging deep reinforcement learning, multi-robot collaboration, and language-guided planning.
Plain English Explanation
Navigating through crowded environments is a difficult task for robots, as they need to be able to move safely and efficiently without colliding with or disrupting the people around them. The researchers in this paper explored different approaches to help robots learn how to successfully navigate through crowds.
One key idea they looked at was using deep reinforcement learning, which involves training the robot to learn from trial-and-error experiences how to make the best decisions for navigating the crowd. This allows the robot to adapt and improve its navigation skills over time.
The researchers also investigated how multi-robot collaboration could be used, where multiple robots work together to coordinate their movements and share information to navigate the crowd more effectively as a team.
Finally, they looked at using language-guided planning, where the robots can understand and follow natural language instructions from humans to guide their navigation through the crowd.
By exploring these different learning strategies, the researchers aimed to develop more robust and adaptable crowd navigation capabilities for robots, which could have important applications in areas like warehouse logistics, event security, and urban mobility.
Technical Explanation
The paper begins by outlining the key challenges in crowd navigation for robots, including the need to safely and efficiently navigate through dynamic, unpredictable environments while avoiding collisions and disturbances.
To address these challenges, the researchers proposed a multi-faceted approach involving several key components:
-
Deep Reinforcement Learning: The researchers trained their robots using deep reinforcement learning techniques, which allowed the robots to learn effective navigation policies through trial-and-error interactions with the crowd. This enabled the robots to adapt their behavior based on the specific crowd conditions.
-
Multi-Robot Collaboration: The paper also explored multi-robot collaboration strategies, where multiple robots coordinate their movements and share information to navigate the crowd more effectively as a team.
-
Language-Guided Planning: Finally, the researchers investigated the use of language-guided planning, which allows the robots to understand and follow natural language instructions from humans to guide their navigation through the crowd.
The researchers conducted extensive experiments to evaluate the performance of their proposed techniques, including simulations and real-world deployments. The results demonstrated significant improvements in the robots' ability to navigate through dense crowds while minimizing disruptions and collisions.
Critical Analysis
The paper provides a comprehensive and well-designed study of various learning strategies for crowd navigation. The researchers have carefully considered the key challenges and limitations of existing approaches and have proposed innovative solutions that leverage state-of-the-art techniques in deep reinforcement learning, multi-agent collaboration, and language-guided planning.
One potential limitation of the work is the reliance on simulation-based experiments, which may not fully capture the complexity and unpredictability of real-world crowd environments. While the researchers did conduct some real-world deployments, it would be valuable to see more extensive validation of the proposed methods in diverse, large-scale crowd scenarios.
Additionally, the paper could have delved deeper into the ethical considerations and potential societal impacts of deploying autonomous robots in crowded public spaces. Issues such as privacy, trust, and the impact on human behavior and social dynamics should be thoroughly explored to ensure the responsible development and deployment of these technologies.
Further research could also investigate the scalability of the proposed approaches, as well as their robustness to unexpected events or adversarial conditions that may arise in real-world crowd settings.
Conclusion
This paper presents a comprehensive investigation into learning strategies for successful crowd navigation by robots. The researchers have developed a multi-pronged approach that leverages deep reinforcement learning, multi-robot collaboration, and language-guided planning to enable robots to navigate through dense crowds effectively and safely.
The results of the study demonstrate the potential of these techniques to significantly improve the performance of autonomous robots in crowded environments, with important implications for applications such as warehouse logistics, event management, and urban mobility.
While the paper provides a strong foundation for further research in this area, it also highlights the need for deeper exploration of the ethical and societal implications of deploying such technologies in public spaces. By addressing these considerations, the research community can work towards developing crowd navigation solutions that are not only technologically advanced but also socially responsible and beneficial.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

SHINE: Social Homology Identification for Navigation in Crowded Environments
Diego Martinez-Baselga, Oscar de Groot, Luzia Knoedler, Luis Riazuelo, Javier Alonso-Mora, Luis Montano
0
0
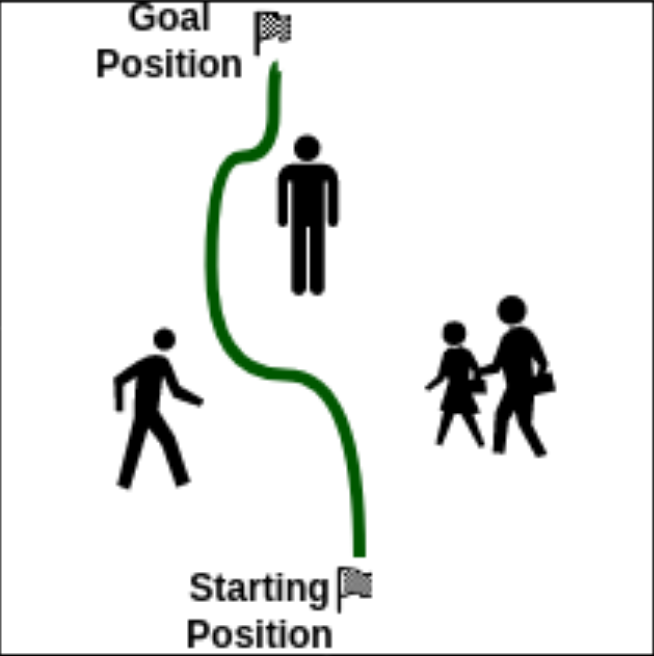
Navigating mobile robots in social environments remains a challenging task due to the intricacies of human-robot interactions. Most of the motion planners designed for crowded and dynamic environments focus on choosing the best velocity to reach the goal while avoiding collisions, but do not explicitly consider the high-level navigation behavior (avoiding through the left or right side, letting others pass or passing before others, etc.). In this work, we present a novel motion planner that incorporates topology distinct paths representing diverse navigation strategies around humans. The planner selects the topology class that imitates human behavior the best using a deep neural network model trained on real-world human motion data, ensuring socially intelligent and contextually aware navigation. Our system refines the chosen path through an optimization-based local planner in real time, ensuring seamless adherence to desired social behaviors. In this way, we decouple perception and local planning from the decision-making process. We evaluate the prediction accuracy of the network with real-world data. In addition, we assess the navigation capabilities in both simulation and a real-world platform, comparing it with other state-of-the-art planners. We demonstrate that our planner exhibits socially desirable behaviors and shows a smooth and remarkable performance.
4/26/2024
Structured Graph Network for Constrained Robot Crowd Navigation with Low Fidelity Simulation
Shuijing Liu, Kaiwen Hong, Neeloy Chakraborty, Katherine Driggs-Campbell
0
0
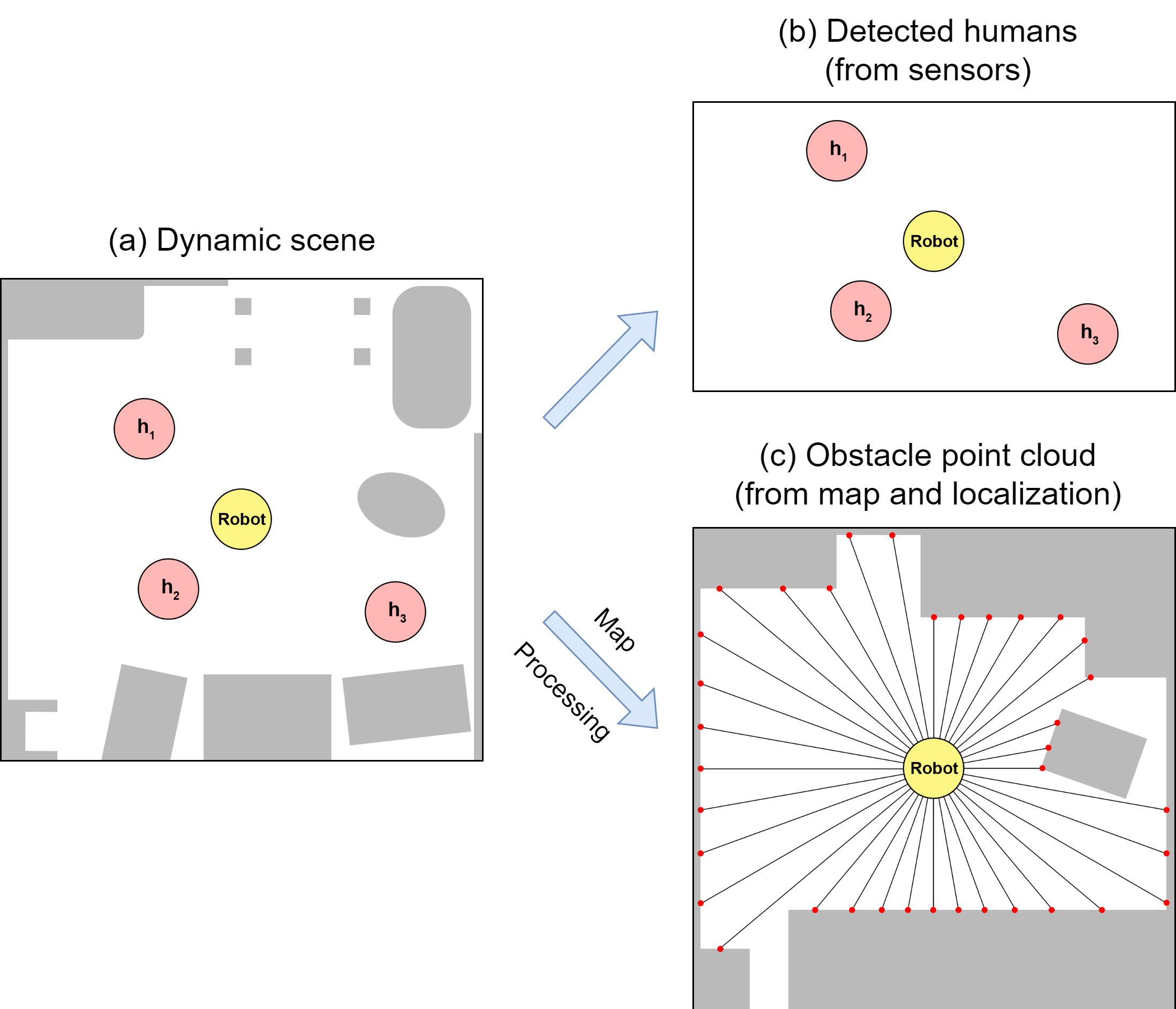
We investigate the feasibility of deploying reinforcement learning (RL) policies for constrained crowd navigation using a low-fidelity simulator. We introduce a representation of the dynamic environment, separating human and obstacle representations. Humans are represented through detected states, while obstacles are represented as computed point clouds based on maps and robot localization. This representation enables RL policies trained in a low-fidelity simulator to deploy in real world with a reduced sim2real gap. Additionally, we propose a spatio-temporal graph to model the interactions between agents and obstacles. Based on the graph, we use attention mechanisms to capture the robot-human, human-human, and human-obstacle interactions. Our method significantly improves navigation performance in both simulated and real-world environments. Video demonstrations can be found at https://sites.google.com/view/constrained-crowdnav/home.
5/29/2024
Learning Early Social Maneuvers for Enhanced Social Navigation
Yigit Yildirim, Mehmet Suzer, Emre Ugur
0
0
Socially compliant navigation is an integral part of safety features in Human-Robot Interaction. Traditional approaches to mobile navigation prioritize physical aspects, such as efficiency, but social behaviors gain traction as robots appear more in daily life. Recent techniques to improve the social compliance of navigation often rely on predefined features or reward functions, introducing assumptions about social human behavior. To address this limitation, we propose a novel Learning from Demonstration (LfD) framework for social navigation that exclusively utilizes raw sensory data. Additionally, the proposed system contains mechanisms to consider the future paths of the surrounding pedestrians, acknowledging the temporal aspect of the problem. The final product is expected to reduce the anxiety of people sharing their environment with a mobile robot, helping them trust that the robot is aware of their presence and will not harm them. As the framework is currently being developed, we outline its components, present experimental results, and discuss future work towards realizing this framework.
5/3/2024
Mixed-Strategy Nash Equilibrium for Crowd Navigation
Muchen Sun, Francesca Baldini, Katie Hughes, Peter Trautman, Todd Murphey
0
0
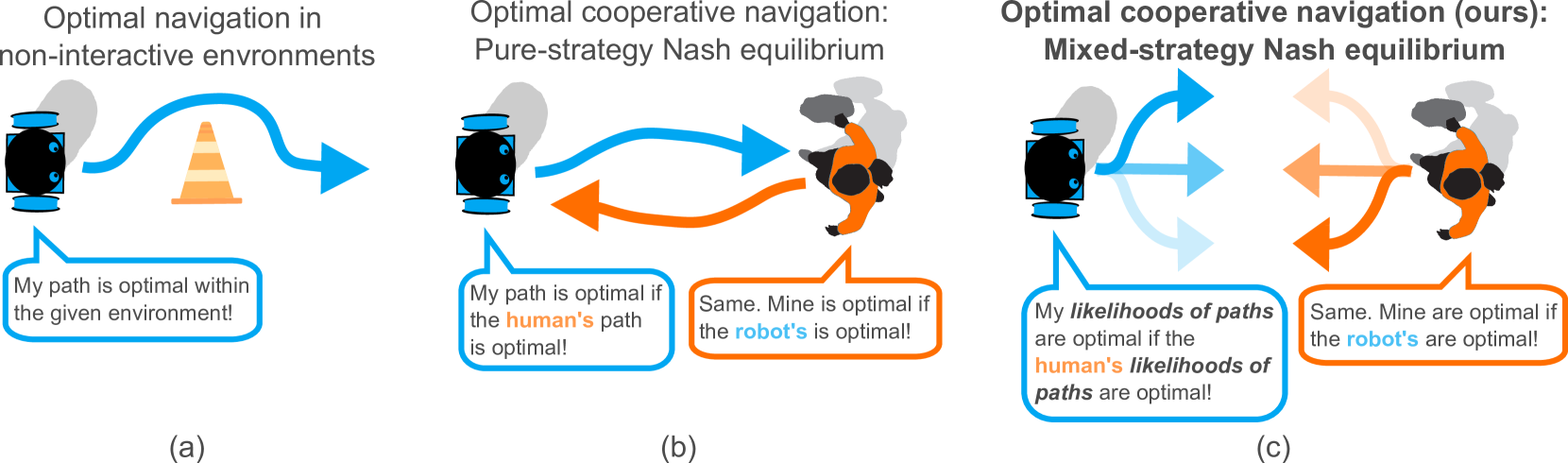
Robots navigating in crowded areas should negotiate free space with humans rather than fully controlling collision avoidance, as this can lead to freezing behavior. Game theory provides a framework for the robot to reason about potential cooperation from humans for collision avoidance during path planning. In particular, the mixed strategy Nash equilibrium captures the negotiation behavior under uncertainty, making it well suited for crowd navigation. However, computing the mixed strategy Nash equilibrium is often prohibitively expensive for real-time decision-making. In this paper, we propose an iterative Bayesian update scheme over probability distributions of trajectories. The algorithm simultaneously generates a stochastic plan for the robot and probabilistic predictions of other pedestrians' paths. We prove that the proposed algorithm is equivalent to solving a mixed strategy game for crowd navigation, and the algorithm guarantees the recovery of the global Nash equilibrium of the game. We name our algorithm Bayes' Rule Nash Equilibrium (BRNE) and develop a real-time model prediction crowd navigation framework. Since BRNE is not solving a general-purpose mixed strategy Nash equilibrium but a tailored formula specifically for crowd navigation, it can compute the solution in real-time on a low-power embedded computer. We evaluate BRNE in both simulated environments and real-world pedestrian datasets. BRNE consistently outperforms non-learning and learning-based methods regarding safety and navigation efficiency. It also reaches human-level crowd navigation performance in the pedestrian dataset benchmark. Lastly, we demonstrate the practicality of our algorithm with real humans on an untethered quadruped robot with fully onboard perception and computation.
6/18/2024