The Shortcomings of Force-from-Motion in Robot Learning

0
Sign in to get full access
Overview
- This paper discusses the shortcomings of using force-from-motion, a common approach in robot learning, and proposes alternative strategies.
- The authors argue that force-from-motion has limitations in capturing the true dynamics and interactions involved in robotic manipulation tasks.
- They suggest exploring other learning methods, such as learning force control for legged manipulation, generating robot policy code, and robust soft robot interactions, to address these shortcomings.
Plain English Explanation
Robots are often trained to learn how to manipulate objects by observing the motion of those objects, a technique called "force-from-motion." However, this paper argues that this approach has some limitations. The authors suggest that simply looking at the movement of objects doesn't always capture the full complexity of the physical interactions and forces involved in robotic manipulation tasks.
Instead, the researchers propose exploring other learning methods that focus more on directly understanding and modeling the forces and dynamics at play. For example, they point to research on learning force control for legged robots, which could be applicable to arm-based manipulation as well. They also mention work on generating robot control code and developing soft, responsive robots that can better interact with their environments.
The key idea is that by moving beyond just observing motion, robots may be able to learn more nuanced and effective manipulation skills that are grounded in a deeper understanding of the underlying physics and forces at play.
Technical Explanation
The paper argues that the common approach of "force-from-motion" in robot learning has significant limitations. This technique involves using observations of object motion to infer the forces and dynamics involved in manipulating those objects. However, the authors contend that this indirect method fails to capture the true complexity of the physical interactions.
Instead, the researchers propose exploring alternative learning strategies that more directly model the forces and dynamics at play. They point to work on learning force control for legged manipulation, which could provide insights applicable to arm-based manipulation as well. The authors also highlight research on automatically generating high-precision robot control code and developing robust, soft robots capable of rich interactions.
The key idea is that by moving beyond just observing motion, robots may be able to learn more nuanced and effective manipulation skills that are grounded in a deeper understanding of the underlying physics and forces. This could lead to more dexterous, adaptive, and reliable robotic systems for a wide range of applications.
Critical Analysis
The paper raises valid concerns about the limitations of the force-from-motion approach in robot learning. The authors make a compelling case that this indirect method may fail to capture the full complexity of physical interactions, potentially limiting the manipulation capabilities of robots trained in this way.
However, the paper does not provide a detailed comparison of force-from-motion against the alternative learning strategies it proposes. While the authors cite relevant research in areas like force control, code generation, and soft robotics, they do not thoroughly evaluate the merits and drawbacks of these approaches relative to the shortcomings of force-from-motion. Readers would benefit from a more comprehensive analysis of the tradeoffs involved.
Additionally, the paper could have addressed the practical challenges of implementing these alternative learning methods, such as the increased data requirements, computational complexity, or the need for more sophisticated sensing and control hardware. Acknowledging these potential obstacles would strengthen the critical perspective and help readers assess the feasibility of the proposed solutions.
Overall, the paper effectively highlights the shortcomings of force-from-motion and the need to explore more sophisticated learning techniques. However, a deeper, more balanced analysis of the alternatives and their practical implications would further strengthen the contribution and help guide future research in this important area of robot learning.
Conclusion
This paper makes a compelling case for moving beyond the limitations of the force-from-motion approach in robot learning. By arguing that this indirect method fails to capture the true complexity of physical interactions, the authors point to the need for more direct modelling of forces and dynamics to enable more dexterous and adaptive robotic manipulation.
While the paper does not provide a comprehensive comparison of alternative learning strategies, it highlights promising directions such as learning force control, generating high-precision control code, and developing robust soft robots. Exploring these and other approaches that more closely model the underlying physics could lead to significant advancements in robotic manipulation capabilities, with far-reaching implications across a variety of industries and applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
The Shortcomings of Force-from-Motion in Robot Learning
Elie Aljalbout, Felix Frank, Patrick van der Smagt, Alexandros Paraschos
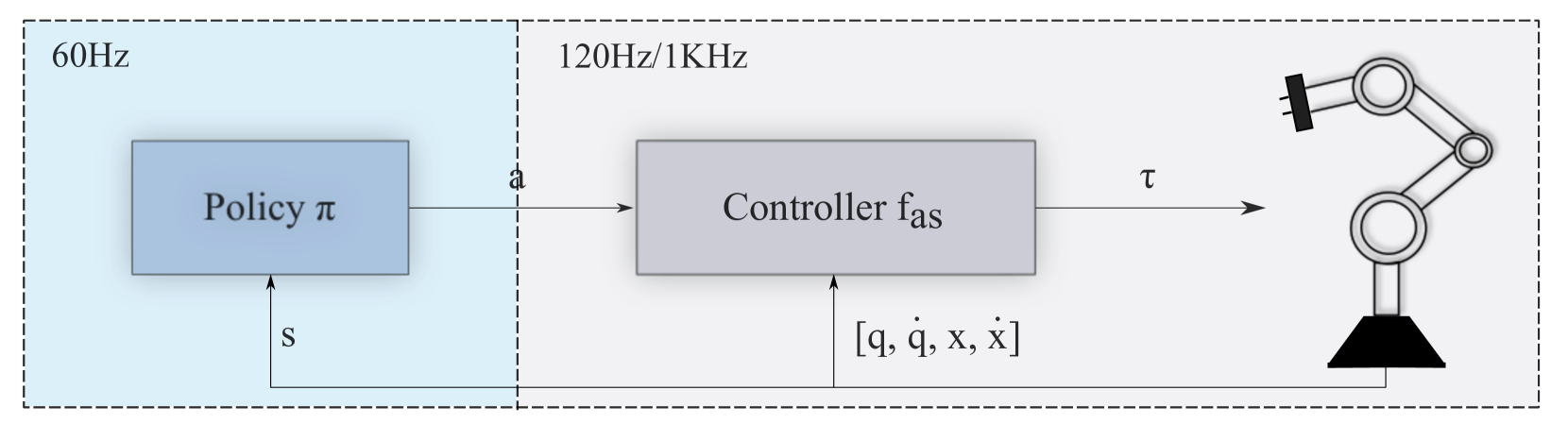
Robotic manipulation requires accurate motion and physical interaction control. However, current robot learning approaches focus on motion-centric action spaces that do not explicitly give the policy control over the interaction. In this paper, we discuss the repercussions of this choice and argue for more interaction-explicit action spaces in robot learning.
Read more7/4/2024
0
On the Role of the Action Space in Robot Manipulation Learning and Sim-to-Real Transfer
Elie Aljalbout, Felix Frank, Maximilian Karl, Patrick van der Smagt
We study the choice of action space in robot manipulation learning and sim-to-real transfer. We define metrics that assess the performance, and examine the emerging properties in the different action spaces. We train over 250 reinforcement learning~(RL) agents in simulated reaching and pushing tasks, using 13 different control spaces. The choice of spaces spans combinations of common action space design characteristics. We evaluate the training performance in simulation and the transfer to a real-world environment. We identify good and bad characteristics of robotic action spaces and make recommendations for future designs. Our findings have important implications for the design of RL algorithms for robot manipulation tasks, and highlight the need for careful consideration of action spaces when training and transferring RL agents for real-world robotics.
Read more5/1/2024
0
Learning Force Control for Legged Manipulation
Tifanny Portela, Gabriel B. Margolis, Yandong Ji, Pulkit Agrawal
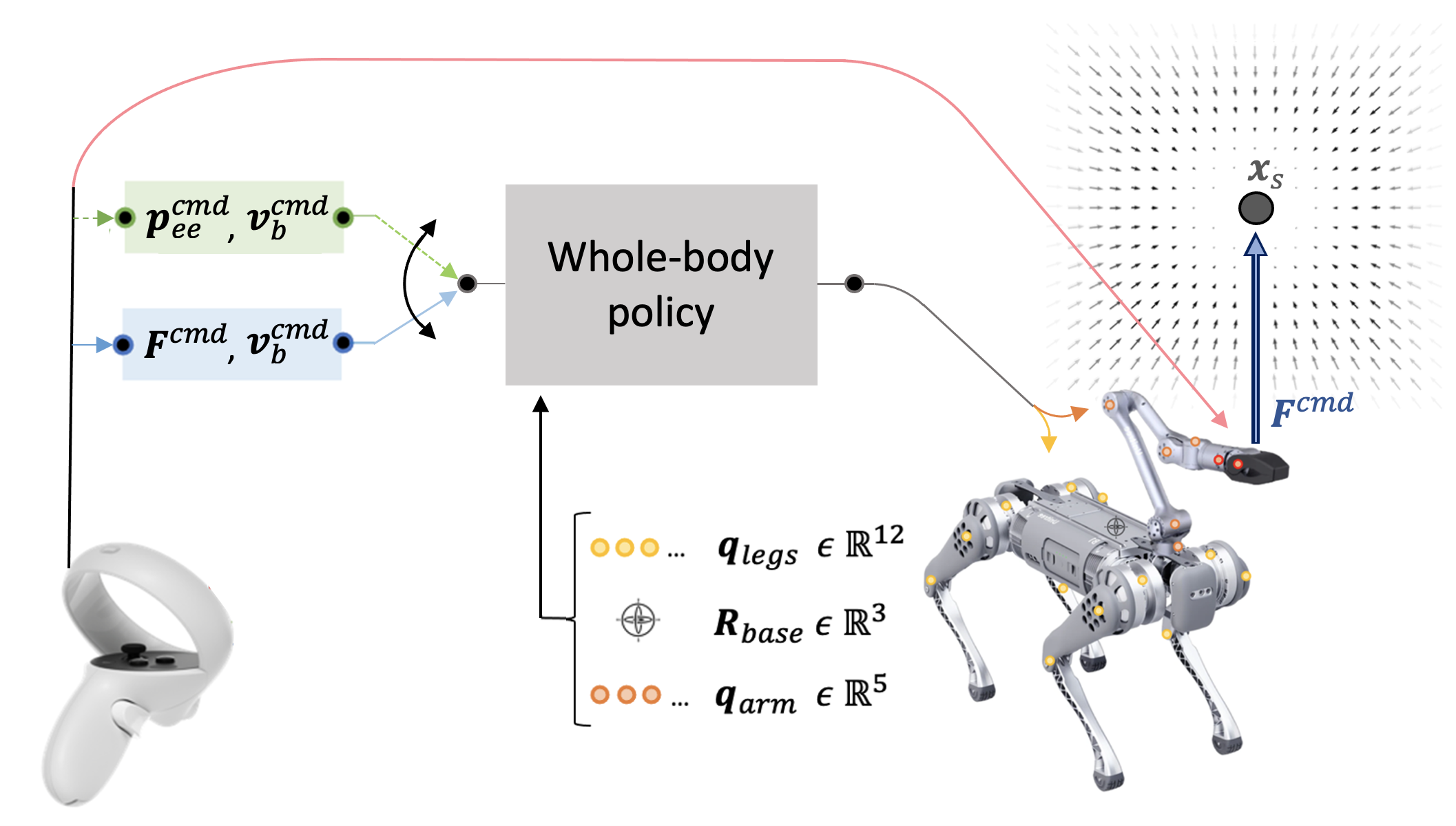
Controlling contact forces during interactions is critical for locomotion and manipulation tasks. While sim-to-real reinforcement learning (RL) has succeeded in many contact-rich problems, current RL methods achieve forceful interactions implicitly without explicitly regulating forces. We propose a method for training RL policies for direct force control without requiring access to force sensing. We showcase our method on a whole-body control platform of a quadruped robot with an arm. Such force control enables us to perform gravity compensation and impedance control, unlocking compliant whole-body manipulation. The learned whole-body controller with variable compliance makes it intuitive for humans to teleoperate the robot by only commanding the manipulator, and the robot's body adjusts automatically to achieve the desired position and force. Consequently, a human teleoperator can easily demonstrate a wide variety of loco-manipulation tasks. To the best of our knowledge, we provide the first deployment of learned whole-body force control in legged manipulators, paving the way for more versatile and adaptable legged robots.
Read more5/21/2024

0
GenCHiP: Generating Robot Policy Code for High-Precision and Contact-Rich Manipulation Tasks
Kaylee Burns, Ajinkya Jain, Keegan Go, Fei Xia, Michael Stark, Stefan Schaal, Karol Hausman
Large Language Models (LLMs) have been successful at generating robot policy code, but so far these results have been limited to high-level tasks that do not require precise movement. It is an open question how well such approaches work for tasks that require reasoning over contact forces and working within tight success tolerances. We find that, with the right action space, LLMs are capable of successfully generating policies for a variety of contact-rich and high-precision manipulation tasks, even under noisy conditions, such as perceptual errors or grasping inaccuracies. Specifically, we reparameterize the action space to include compliance with constraints on the interaction forces and stiffnesses involved in reaching a target pose. We validate this approach on subtasks derived from the Functional Manipulation Benchmark (FMB) and NIST Task Board Benchmarks. Exposing this action space alongside methods for estimating object poses improves policy generation with an LLM by greater than 3x and 4x when compared to non-compliant action spaces
Read more4/11/2024