Should Teleoperation Be like Driving in a Car? Comparison of Teleoperation HMIs

0
Sign in to get full access
Overview
- The paper compares different human-machine interface (HMI) designs for teleoperation, exploring whether a car-like interface is more intuitive and user-friendly compared to other control schemes.
- Teleoperation refers to the remote control of robots or other machines, which is increasingly important as robots are used for tasks like search and rescue, construction, and hazardous materials handling.
- Understanding how best to design the HMI for teleoperation is crucial for ensuring the systems are easy to use and effective.
Plain English Explanation
The paper investigates whether a teleoperation interface that works like driving a car is more natural and user-friendly compared to other control methods. When operating a robot or other machine remotely, the way the human interacts with the system through the interface (the HMI) is very important. The researchers wanted to see if making the teleoperation interface similar to driving a car, which most people are familiar with, would be easier for users compared to other control schemes.
Teleoperation is becoming increasingly common as robots are used for tasks like search and rescue, construction, and handling hazardous materials where it's safer for a human to control the robot from a distance. So understanding how to design the HMI for these teleoperation systems is crucial - the interface needs to be intuitive and easy to use so the human operator can effectively control the remote machine.
Technical Explanation
The paper presents a comparison of different HMI designs for teleoperation, including a car-like interface that uses steering, acceleration, and braking controls similar to driving a vehicle. This is contrasted with other control schemes such as a direct mapping of hand/arm movements to the robot's motion.
The researchers conducted user studies where participants were asked to complete various teleoperation tasks using the different HMI designs. They measured factors like task completion time, mental workload, and user preference to evaluate the relative performance and usability of the interfaces.
The results suggest that the car-like interface was more natural and easier for users to pick up compared to the other control methods tested. Participants reported lower mental workload and generally preferred the car-like HMI, despite there being no significant difference in task completion times across the interfaces.
Critical Analysis
The paper provides some valuable insights into HMI design for teleoperation, but there are a few limitations to consider. The user studies were relatively small in scale, with only around 20 participants per condition, so the results may not fully generalize. Additionally, the tasks tested were relatively simple and constrained - more complex real-world teleoperation scenarios could yield different outcomes.
There is also the question of how well the car-like interface would transfer to operating very different types of remote machines, beyond just mobile robots. The intuitive mapping to steering, acceleration, and braking may not translate as effectively when the remote platform has a very different form factor or capabilities.
Further research is needed to validate these findings at a larger scale and in more diverse teleoperation contexts. Exploring how the HMI design interacts with operator training and experience would also be an interesting area for future work.
Conclusion
Overall, this paper offers promising evidence that a car-like HMI can be more intuitive and user-friendly for teleoperation compared to other control schemes. This suggests that leveraging people's existing knowledge and skills from driving could be a useful approach for designing effective teleoperation interfaces. As robots continue to take on an increasing range of real-world tasks, improving the ease and efficiency of remote control will be crucial for realizing the full potential of these technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Should Teleoperation Be like Driving in a Car? Comparison of Teleoperation HMIs
Maria-Magdalena Wolf, Richard Taupitz, Frank Diermeyer
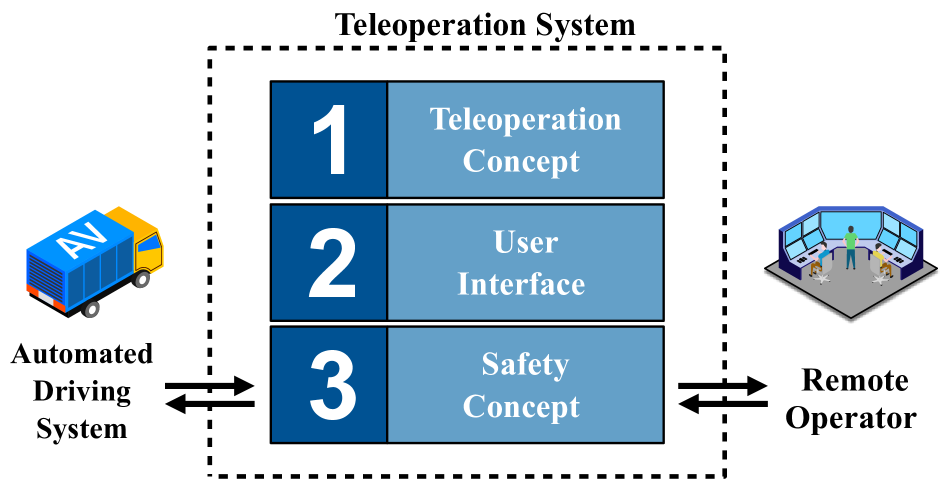
Since Automated Driving Systems are not expected to operate flawlessly, Automated Vehicles will require human assistance in certain situations. For this reason, teleoperation offers the opportunity for a human to be remotely connected to the vehicle and assist it. The Remote Operator can provide extensive support by directly controlling the vehicle, eliminating the need for Automated Driving functions. However, due to the physical disconnection to the vehicle, monitoring and controlling is challenging compared to driving in the vehicle. Therefore, this work follows the approach of simplifying the task for the Remote Operator by separating the path and velocity input. In a study using a miniature vehicle, different operator-vehicle interactions and input devices were compared based on collisions, task completion time, usability and workload. The evaluation revealed significant differences between the three implemented prototypes using a steering wheel, mouse and keyboard or a touchscreen. The separate input of path and velocity via mouse and keyboard or touchscreen is preferred but is slower compared to parallel input via steering wheel.
Read more4/29/2024
🌿
0
Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
David Brecht, Nils Gehrke, Tobias Kerbl, Niklas Krauss, Domagoj Majstorovic, Florian Pfab, Maria-Magdalena Wolf, Frank Diermeyer
Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.
Read more4/24/2024

0
Human-Robot Interface for Teleoperated Robotized Planetary Sample Collection and Assembly
Lorenzo Pagliara, Vincenzo Petrone, Enrico Ferrentino, Pasquale Chiacchio
As human space exploration evolves toward longer voyages farther from our home planet, in-situ resource utilization (ISRU) becomes increasingly important. Haptic teleoperations are one of the technologies by which such activities can be carried out remotely by humans, whose expertise is still necessary for complex activities. In order to perform precision tasks with effectiveness, the operator must experience ease of use and accuracy. The same features are demanded to reduce the complexity of the training procedures and the associated learning time for operators without a specific background in robotic teleoperations. Haptic teleoperation systems, that allow for a natural feeling of forces, need to cope with the trade-off between accurate movements and workspace extension. Clearly, both of them are required for typical ISRU tasks. In this work, we develop a new concept of operations and suitable human-robot interfaces to achieve sample collection and assembly with ease of use and accuracy. In the proposed operational concept, the teleoperation space is extended by executing automated trajectories, offline planned at the control station. In three different experimental scenarios, we validate the end-to-end system involving the control station and the robotic asset, by assessing the contribution of haptics to mission success, the system robustness to consistent delays, and the ease of training new operators.
Read more6/14/2024

0
Hands-free teleoperation of a nearby manipulator through a virtual body-to-robot link
Alexis Poignant, Nathanael Jarrass'e, Guillaume Morel
This paper introduces an innovative control approach for teleoperating a robot in close proximity to a human operator, which could be useful to control robots embedded on wheelchairs. The method entails establishing a virtual connection between a specific body part and the robot's end-effector, visually displayed through an Augmented Reality (AR) headset. This linkage enables the transformation of body rotations into amplified effector translations, extending the robot's workspace beyond the capabilities of direct one-to-one mapping. Moreover, the linkage can be reconfigured using a joystick, resulting in a hybrid position/velocity control mode using the body/joystick motions respectively. After providing a comprehensive overview of the control methodology, we present the results of an experimental campaign designed to elucidate the advantages and drawbacks of our approach compared to the conventional joystick-based teleoperation method. The body-link control demonstrates slightly faster task completion and is naturally preferred over joystick velocity control, albeit being more physically demanding for tasks with a large range. The hybrid mode, where participants could simultaneously utilize both modes, emerges as a compromise, combining the intuitiveness of the body mode with the extensive task range of the velocity mode. Finally, we provide preliminary observations on potential assistive applications using head motions, especially for operators with limited range of motion in their bodies.
Read more6/14/2024