Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements

0
🌿
Sign in to get full access
Overview
- This paper examines different approaches to teleoperation, which allows a human remote operator to support highly automated vehicles when the automated driving system disengages.
- The researchers reviewed the literature on automated vehicle disengagements and previous studies comparing teleoperation concepts.
- They then evaluated various teleoperation concepts in an expert workshop, using different automated vehicle disengagement scenarios and performance metrics.
- Based on the workshop results, the researchers identified a set of teleoperation concepts that can effectively address a wide range of automated vehicle disengagements in a safe and efficient manner.
Plain English Explanation
Teleoperation is a way to remotely control highly automated vehicles when the self-driving system stops working properly. In these cases, a human remote operator can wirelessly connect to the vehicle and either help the automated system get back on track or take over driving completely so the vehicle can resume its journey.
There are different approaches to remote support of automated driving functions, known as teleoperation concepts. The researchers reviewed the existing literature on these concepts and the types of situations where an automated vehicle might need to disengage from self-driving mode. They also looked at previous studies that compared different teleoperation strategies.
The researchers then held an expert workshop to evaluate various teleoperation concepts across a range of automated vehicle disengagement scenarios. They used specific metrics to assess how well each approach performed in terms of safety and efficiency.
Based on the workshop findings, the researchers identified a set of teleoperation concepts that can effectively address a wide variety of automated vehicle disengagements. This helps ensure the vehicle can continue its journey safely when the self-driving system needs human assistance.
Technical Explanation
The researchers conducted a literature review to understand the current state of research on automated vehicle disengagements and the comparison of different teleoperation concepts. They found that while many teleoperation approaches have been described, there has been no comprehensive evaluation to determine which concepts are best suited to safely and efficiently support highly automated vehicles in diverse disengagement scenarios.
To address this gap, the researchers organized an expert workshop. They presented participants with various automated vehicle disengagement scenarios and asked them to evaluate different teleoperation concepts using specific performance metrics, such as safety and efficiency.
The workshop results allowed the researchers to identify a set of teleoperation concepts that can effectively address a wide range of automated vehicle disengagements. This provides a foundation for developing remote support systems that can keep self-driving cars safely on the road when their autonomous capabilities are temporarily disrupted.
Critical Analysis
The researchers acknowledge that their expert workshop evaluation of teleoperation concepts was limited in scope, focusing on a select set of disengagement scenarios and performance metrics. They suggest that future research should expand the range of scenarios and metrics considered to further validate and refine the recommended teleoperation approaches.
Additionally, the paper does not delve into the technical details of the various teleoperation concepts, such as the specific interface designs or the underlying control algorithms. A more in-depth examination of the technical characteristics of each approach could provide additional insights into their strengths, weaknesses, and suitability for different types of automated vehicle disengagements.
Overall, the researchers have laid a solid foundation for understanding the landscape of teleoperation concepts and identifying promising approaches for supporting highly automated vehicles. However, further research and real-world testing will be needed to fully validate the effectiveness and practicality of these remote support systems.
Conclusion
This study provides a comprehensive review of teleoperation concepts for supporting highly automated vehicles when their self-driving systems disengage. By evaluating various approaches through an expert workshop, the researchers have identified a set of teleoperation concepts that can effectively address a wide range of automated vehicle disengagement scenarios in a safe and efficient manner.
These findings have important implications for the development of remote support systems that can help keep self-driving cars on the road and ensure the safety of passengers and other road users when the autonomous capabilities are temporarily disrupted. As the technology for highly automated vehicles continues to evolve, the insights from this research can guide the design and implementation of robust teleoperation solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
0
Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
David Brecht, Nils Gehrke, Tobias Kerbl, Niklas Krauss, Domagoj Majstorovic, Florian Pfab, Maria-Magdalena Wolf, Frank Diermeyer
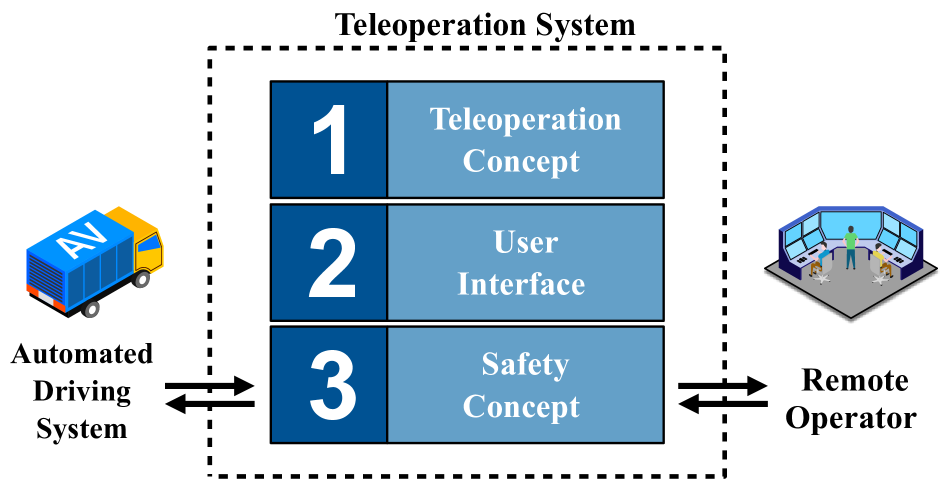
Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.
Read more4/24/2024
0
Should Teleoperation Be like Driving in a Car? Comparison of Teleoperation HMIs
Maria-Magdalena Wolf, Richard Taupitz, Frank Diermeyer
Since Automated Driving Systems are not expected to operate flawlessly, Automated Vehicles will require human assistance in certain situations. For this reason, teleoperation offers the opportunity for a human to be remotely connected to the vehicle and assist it. The Remote Operator can provide extensive support by directly controlling the vehicle, eliminating the need for Automated Driving functions. However, due to the physical disconnection to the vehicle, monitoring and controlling is challenging compared to driving in the vehicle. Therefore, this work follows the approach of simplifying the task for the Remote Operator by separating the path and velocity input. In a study using a miniature vehicle, different operator-vehicle interactions and input devices were compared based on collisions, task completion time, usability and workload. The evaluation revealed significant differences between the three implemented prototypes using a steering wheel, mouse and keyboard or a touchscreen. The separate input of path and velocity via mouse and keyboard or touchscreen is preferred but is slower compared to parallel input via steering wheel.
Read more4/29/2024

0
A Data-Informed Analysis of Scalable Supervision for Safety in Autonomous Vehicle Fleets
Cameron Hickert, Zhongxia Yan, Cathy Wu
Autonomous driving is a highly anticipated approach toward eliminating roadway fatalities. At the same time, the bar for safety is both high and costly to verify. This work considers the role of remotely-located human operators supervising a fleet of autonomous vehicles (AVs) for safety. Such a 'scalable supervision' concept was previously proposed to bridge the gap between still-maturing autonomy technology and the pressure to begin commercial offerings of autonomous driving. The present article proposes DISCES, a framework for Data-Informed Safety-Critical Event Simulation, to investigate the practicality of this concept from a dynamic network loading standpoint. With a focus on the safety-critical context of AVs merging into mixed-autonomy traffic, vehicular arrival processes at 1,097 highway merge points are modeled using microscopic traffic reconstruction with historical data from interstates across three California counties. Combined with a queuing theoretic model, these results characterize the dynamic supervision requirements and thereby scalability of the teleoperation approach. Across all scenarios we find reductions in operator requirements greater than 99% as compared to in-vehicle supervisors for the time period analyzed. The work also demonstrates two methods for reducing these empirical supervision requirements: (i) the use of cooperative connected AVs -- which are shown to produce an average 3.67 orders-of-magnitude system reliability improvement across the scenarios studied -- and (ii) aggregation across larger regions.
Read more9/17/2024
🏋️
0
Areas of Improvement for Autonomous Vehicles: A Machine Learning Analysis of Disengagement Reports
Tyler Ward
Since 2014, the California Department of Motor Vehicles (CDMV) has compiled information from manufacturers of autonomous vehicles (AVs) regarding factors that lead to the disengagement from autonomous driving mode in these vehicles. These disengagement reports (DRs) contain information detailing whether the AV disengaged from autonomous mode due to technology failure, manual override, or other factors during driving tests. This paper presents a machine learning (ML) based analysis of the information from the 2023 DRs. We use a natural language processing (NLP) approach to extract important information from the description of a disengagement, and use the k-Means clustering algorithm to group report entries together. The cluster frequency is then analyzed, and each cluster is manually categorized based on the factors leading to disengagement. We discuss findings from previous years' DRs, and provide our own analysis to identify areas of improvement for AVs.
Read more8/2/2024