Smoothing of Headland Path Edges and Headland-to-Mainfield Lane Transitions Based on a Spatial Domain Transformation and Linear Programming

0
Sign in to get full access
Overview
- This paper presents a method for smoothing the edges of headland paths and the transitions between headland paths and main field lanes in autonomous agricultural vehicles.
- The approach involves a spatial domain transformation and a linear programming optimization problem to generate smooth trajectories.
- The proposed method aims to improve the efficiency and safety of autonomous agricultural operations by reducing sharp turns and discontinuities in the vehicle's path.
Plain English Explanation
On farms, tractors and other agricultural vehicles often need to navigate around the edges of fields, known as "headlands," before entering the main part of the field. These headland paths can have sharp turns and abrupt transitions when connecting to the main field lanes. This research paper presents a technique to make these paths and transitions smoother and more continuous.
The key idea is to use a mathematical process called "spatial domain transformation" to modify the shape of the headland path. This transformation allows the researchers to formulate the problem of finding a smooth path as a type of optimization problem called "linear programming." By solving this optimization problem, they can generate a trajectory for the vehicle that has gentler curves and more gradual changes in direction.
The goal is to improve the efficiency and safety of autonomous agricultural vehicles as they navigate around the edges of fields and transition into the main work areas. Smoother paths can help the vehicle maintain better control, avoid sharp turns, and operate more reliably without sudden changes in direction or speed.
Technical Explanation
The paper proposes a method for smoothing the edges of headland paths and the transitions between headland paths and main field lanes in autonomous agricultural vehicles. The approach involves a spatial domain transformation and a linear programming optimization problem to generate smooth trajectories.
First, the researchers define the problem of finding a smooth path as an optimization problem, where the objective is to minimize the curvature of the path while satisfying constraints related to the vehicle's dynamics and the desired path characteristics. They then apply a spatial domain transformation to the problem, which allows them to reformulate the optimization as a linear programming problem that can be efficiently solved.
The linear programming formulation takes into account factors such as the vehicle's maximum steering angle, minimum turning radius, and maximum acceleration and deceleration limits. By solving this optimization problem, the method generates a smooth trajectory that satisfies these constraints and provides a continuous, efficient path for the autonomous agricultural vehicle to follow.
The proposed approach is evaluated through simulations and compared to other path planning methods, such as FDSPC and bi-level trajectory optimization. The results demonstrate the effectiveness of the spatial domain transformation and linear programming approach in generating smooth paths that improve the efficiency and safety of autonomous agricultural operations.
Critical Analysis
The paper presents a thoughtful and well-designed approach to smoothing the edges of headland paths and the transitions between headland paths and main field lanes for autonomous agricultural vehicles. The use of a spatial domain transformation and linear programming optimization is a clever way to formulate the problem and find a computationally efficient solution.
One potential limitation of the approach is that it may not be able to handle highly complex or irregular field shapes, as the spatial domain transformation and linear programming formulation rely on certain assumptions about the geometry of the problem. The authors acknowledge this and suggest that future work could explore ways to handle more complex field layouts.
Additionally, the paper does not provide extensive experimental validation of the method on real-world agricultural equipment and field conditions. While the simulations are promising, it would be valuable to see how the approach performs in practical, on-field deployments with actual autonomous vehicles and the challenges they may face, such as uneven terrain, obstacles, and variable environmental conditions.
Overall, the research presents a valuable contribution to the field of autonomous agricultural vehicle navigation and path planning. The spatial domain transformation and linear programming optimization technique offer a promising way to generate smooth, efficient, and safe paths for these vehicles as they operate in complex farm environments.
Conclusion
This paper introduces a novel method for smoothing the edges of headland paths and the transitions between headland paths and main field lanes in autonomous agricultural vehicles. The approach involves a spatial domain transformation and a linear programming optimization problem, which allows for the generation of smooth trajectories that satisfy various constraints related to the vehicle's dynamics and path characteristics.
The proposed technique aims to improve the efficiency and safety of autonomous agricultural operations by reducing sharp turns and discontinuities in the vehicle's path. The simulation results demonstrate the effectiveness of the method, and the authors suggest potential avenues for future research to address more complex field layouts and real-world deployment challenges.
Overall, this research contributes a valuable tool to the ongoing efforts to develop robust and reliable autonomous agricultural systems that can navigate the diverse and demanding environments found on modern farms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Smoothing of Headland Path Edges and Headland-to-Mainfield Lane Transitions Based on a Spatial Domain Transformation and Linear Programming
Mogens Plessen
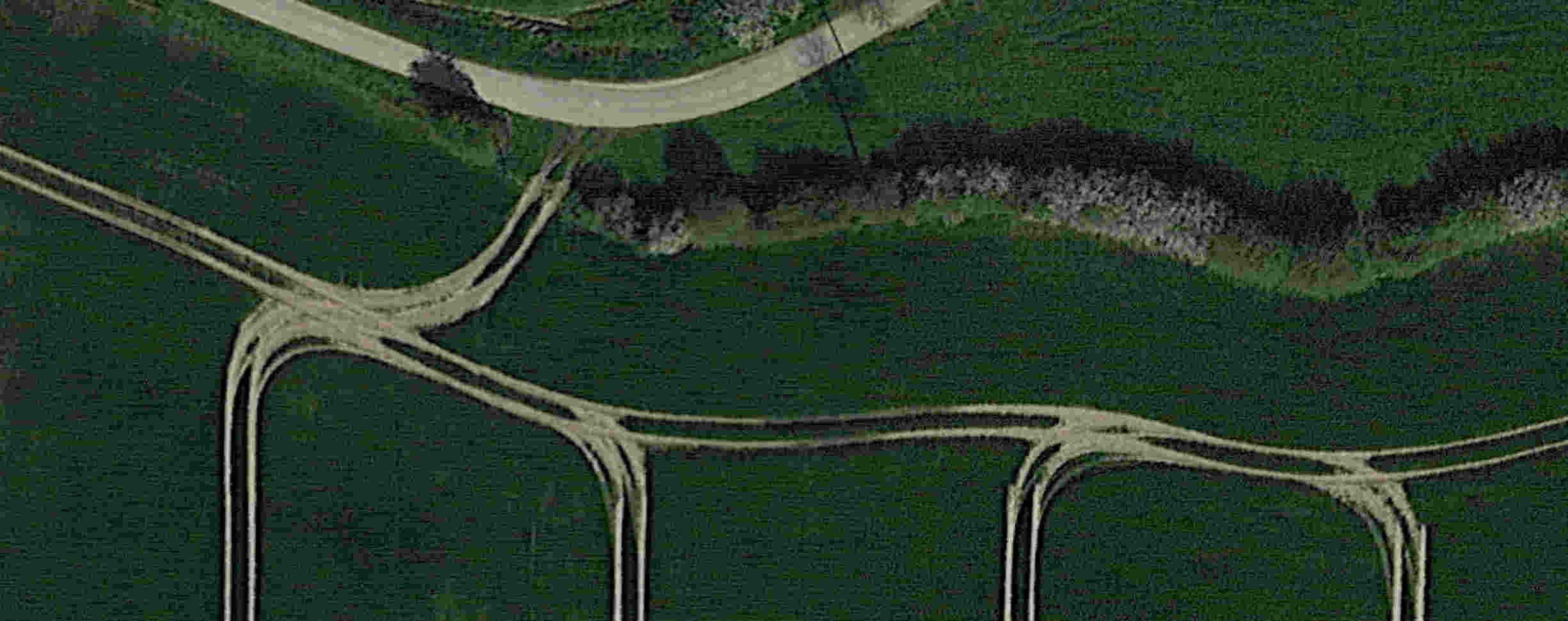
Within the context of in-field path planning and under the assumption of nonholonomic vehicle models this paper addresses two tasks: smoothing of headland path edges and smoothing of headland-to-mainfield lane transitions. Both tasks are solved by a two-step hierarchical algorithm. The first step differs for the two tasks generating either a piecewise-affine or a Dubins reference path. The second step leverages a transformation of vehicle dynamics from the time domain into the spatial domain and linear programming. Benefits such as a hyperparameter-free objective function and spatial constraints useful for area coverage gaps avoidance and precision path planning are discussed. The method, which is a deterministic optimisation-based method, is evaluated on a real-world field solving 3 instances of the first task and 16 instances of the second task.
Read more7/9/2024
📉
0
Optimization-Based Motion Planning for Autonomous Agricultural Vehicles Turning in Constrained Headlands
Chen Peng, Peng Wei, Zhenghao Fei, Yuankai Zhu, Stavros G. Vougioukas
Headland maneuvering is a crucial aspect of unmanned field operations for autonomous agricultural vehicles (AAVs). While motion planning for headland turning in open fields has been extensively studied and integrated into commercial auto-guidance systems, the existing methods primarily address scenarios with ample headland space and thus may not work in more constrained headland geometries. Commercial orchards often contain narrow and irregularly shaped headlands, which may include static obstacles,rendering the task of planning a smooth and collision-free turning trajectory difficult. To address this challenge, we propose an optimization-based motion planning algorithm for headland turning under geometrical constraints imposed by field geometry and obstacles.
Read more6/12/2024
🌐
0
A Long-Short-Term Mixed-Integer Formulation for Highway Lane Change Planning
Rudolf Reiter, Armin Nurkanovic, Daniele Bernadini, Moritz Diehl, Alberto Bemporad
This work considers the problem of optimal lane changing in a structured multi-agent road environment. A novel motion planning algorithm that can capture long-horizon dependencies as well as short-horizon dynamics is presented. Pivotal to our approach is a geometric approximation of the long-horizon combinatorial transition problem which we formulate in the continuous time-space domain. Moreover, a discrete-time formulation of a short-horizon optimal motion planning problem is formulated and combined with the long-horizon planner. Both individual problems, as well as their combination, are formulated as MIQP and solved in real-time by using state-of-the-art solvers. We show how the presented algorithm outperforms two other state-of-the-art motion planning algorithms in closed-loop performance and computation time in lane changing problems. Evaluations are performed using the traffic simulator SUMO, a custom low-level tracking model predictive controller, and high-fidelity vehicle models and scenarios, provided by the CommonRoad environment.
Read more5/7/2024

0
Efficient optimization-based trajectory planning
Jiayu Fan, Nikolce Murgovski, Jun Liang
This research addresses the increasing demand for advanced navigation systems capable of operating within confined surroundings. A significant challenge in this field is developing an efficient planning framework that can generalize across various types of collision avoidance missions. Utilizing numerical optimal control techniques, this study proposes a unified optimization-based planning framework to meet these demands. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Read more7/9/2024