Bi-level Trajectory Optimization on Uneven Terrains with Differentiable Wheel-Terrain Interaction Model
2404.03307
0
0
Abstract
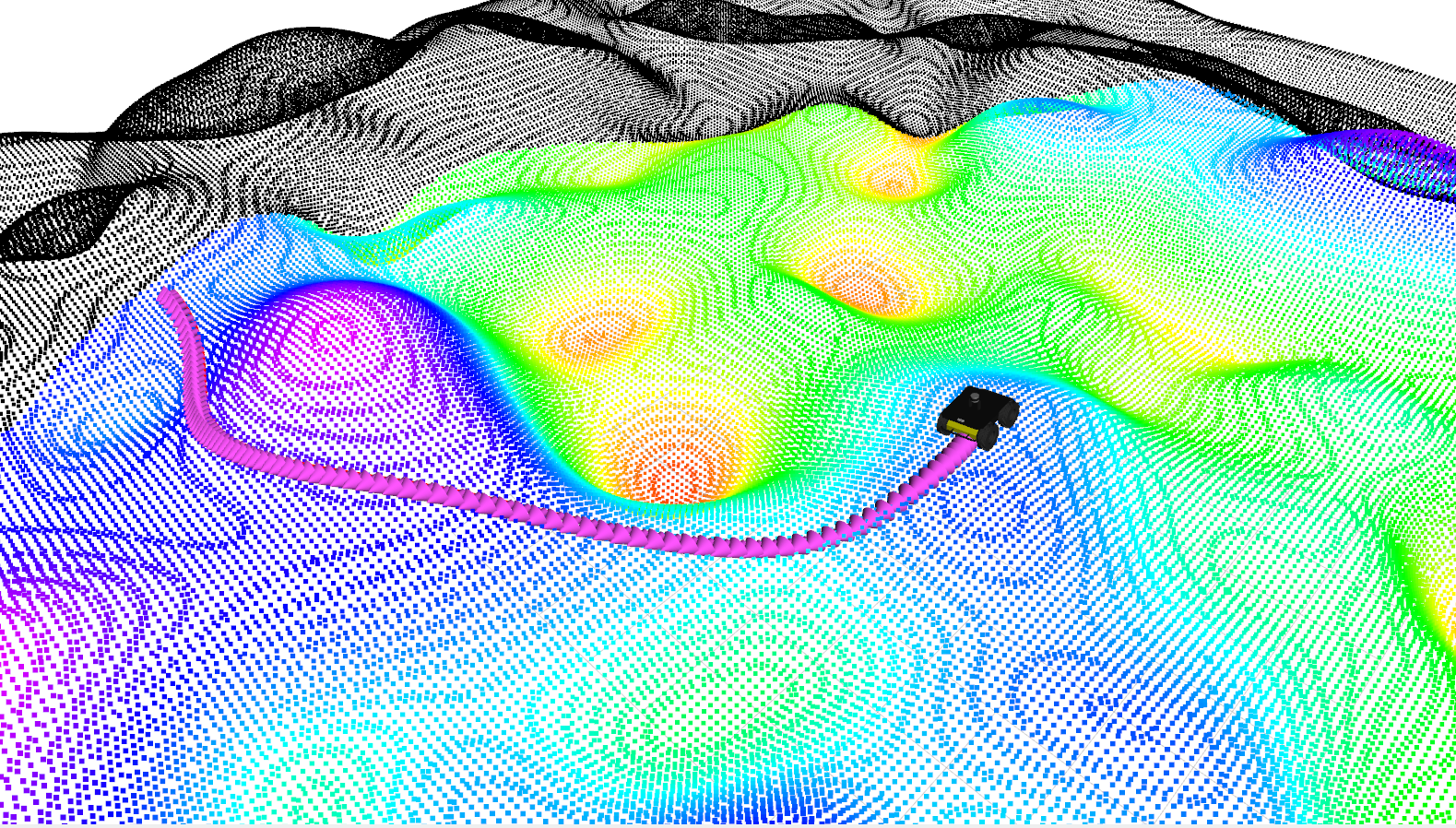
Navigation of wheeled vehicles on uneven terrain necessitates going beyond the 2D approaches for trajectory planning. Specifically, it is essential to incorporate the full 6dof variation of vehicle pose and its associated stability cost in the planning process. To this end, most recent works aim to learn a neural network model to predict the vehicle evolution. However, such approaches are data-intensive and fraught with generalization issues. In this paper, we present a purely model-based approach that just requires the digital elevation information of the terrain. Specifically, we express the wheel-terrain interaction and 6dof pose prediction as a non-linear least squares (NLS) problem. As a result, trajectory planning can be viewed as a bi-level optimization. The inner optimization layer predicts the pose on the terrain along a given trajectory, while the outer layer deforms the trajectory itself to reduce the stability and kinematic costs of the pose. We improve the state-of-the-art in the following respects. First, we show that our NLS based pose prediction closely matches the output from a high-fidelity physics engine. This result coupled with the fact that we can query gradients of the NLS solver, makes our pose predictor, a differentiable wheel-terrain interaction model. We further leverage this differentiability to efficiently solve the proposed bi-level trajectory optimization problem. Finally, we perform extensive experiments, and comparison with a baseline to showcase the effectiveness of our approach in obtaining smooth, stable trajectories.
Create account to get full access
Overview
- This paper presents a bi-level trajectory optimization approach for robot navigation on uneven terrains.
- The key innovation is the use of a differentiable wheel-terrain interaction model to optimize both the robot's trajectory and the control inputs.
- This allows the system to find the most efficient path while considering the complex dynamics of the wheel-terrain interaction.
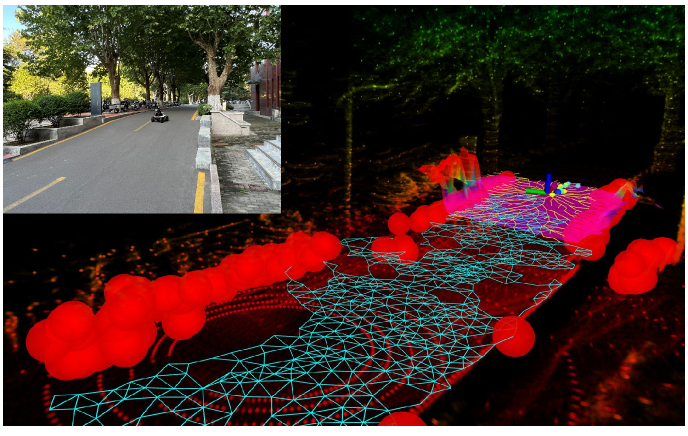
- The authors demonstrate the effectiveness of their approach through simulation and real-world experiments on a wheeled robot navigating challenging outdoor environments.
Plain English Explanation
The paper describes a new way for robots to plan and execute the best path through rough, uneven terrain. Traditionally, robots would plan a trajectory without fully considering the detailed interactions between the wheels and the ground. This can lead to inefficient or infeasible paths.
The researchers developed a more advanced model that can accurately predict how the wheels will interact with the terrain. By incorporating this detailed model into the path planning process, the robot can find the most efficient trajectory that accounts for factors like wheel slip and sinkage.
This "bi-level" optimization approach has the robot plan the overall path at a high level, while simultaneously optimizing the low-level wheel controls to execute that path as efficiently as possible. The authors show through simulations and real-world tests that this approach allows wheeled robots to successfully navigate challenging outdoor environments, like rocky or muddy surfaces, in a more optimal way.
Technical Explanation
The paper presents a bi-level trajectory optimization approach for wheeled robots navigating uneven terrains. The key innovation is the use of a differentiable wheel-terrain interaction model that is integrated into the optimization framework.
At the high level, the robot plans an optimal trajectory through the environment, considering factors like obstacles and terrain roughness. Simultaneously, at a lower level, the robot optimizes the wheel control inputs to execute that planned trajectory as efficiently as possible, based on the detailed wheel-terrain dynamics model.
This coupled optimization allows the robot to find the most efficient path while accounting for the complex wheel-terrain interactions, such as wheel slip and sinkage. The authors use a tightly-coupled sensor fusion approach to accurately estimate the terrain profile and robot state.
The effectiveness of the proposed approach is demonstrated through simulation and real-world experiments on a wheeled robot navigating challenging outdoor environments. The results show significant improvements in path efficiency and robot mobility compared to traditional trajectory optimization methods.
Critical Analysis
The paper presents a well-designed and comprehensive approach to robot navigation on uneven terrains. The key strength is the integration of the detailed wheel-terrain interaction model into the trajectory optimization, which allows the robot to find more efficient and feasible paths.
One potential limitation is that the experiments were conducted on a wheeled robot, and the approach may need to be further extended to handle other types of robot locomotion, such as legged or tracked systems. Additionally, the paper does not provide an in-depth analysis of the computational complexity and real-time performance of the proposed method, which would be important for practical deployment.
Further research could explore ways to incorporate additional sensor modalities, such as visual or tactile feedback, to enhance the terrain estimation and improve the overall robustness of the system. Investigating the scalability of the approach to more complex environments and larger-scale robot teams would also be a valuable direction for future work.
Conclusion
This paper presents a novel bi-level trajectory optimization framework that leverages a differentiable wheel-terrain interaction model to enable efficient and feasible robot navigation on uneven terrains. The key innovation is the tight coupling between the high-level trajectory planning and the low-level wheel control optimization, which allows the robot to find the most suitable path while considering the complex dynamics of the wheel-terrain interaction.
The results demonstrate significant improvements in path efficiency and robot mobility compared to traditional approaches, suggesting that this bi-level optimization strategy could be a valuable tool for enabling robust and adaptive navigation in challenging outdoor environments. The work highlights the importance of considering the detailed physical interactions between the robot and its environment, and the potential benefits of integrating such models into the planning and control processes.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Bipedal Safe Navigation over Uncertain Rough Terrain: Unifying Terrain Mapping and Locomotion Stability
Kasidit Muenprasitivej, Jesse Jiang, Abdulaziz Shamsah, Samuel Coogan, Ye Zhao
0
0
We study the problem of bipedal robot navigation in complex environments with uncertain and rough terrain. In particular, we consider a scenario in which the robot is expected to reach a desired goal location by traversing an environment with uncertain terrain elevation. Such terrain uncertainties induce not only untraversable regions but also robot motion perturbations. Thus, the problems of terrain mapping and locomotion stability are intertwined. We evaluate three different kernels for Gaussian process (GP) regression to learn the terrain elevation. We also learn the motion deviation resulting from both the terrain as well as the discrepancy between the reduced-order Prismatic Inverted Pendulum Model used for planning and the full-order locomotion dynamics. We propose a hierarchical locomotion-dynamics-aware sampling-based navigation planner. The global navigation planner plans a series of local waypoints to reach the desired goal locations while respecting locomotion stability constraints. Then, a local navigation planner is used to generate a sequence of dynamically feasible footsteps to reach local waypoints. We develop a novel trajectory evaluation metric to minimize motion deviation and maximize information gain of the terrain elevation map. We evaluate the efficacy of our planning framework on Digit bipedal robot simulation in MuJoCo.
4/16/2024
📈
Model Predictive Control for Aggressive Driving Over Uneven Terrain
Tyler Han, Alex Liu, Anqi Li, Alex Spitzer, Guanya Shi, Byron Boots
0
0
Terrain traversability in unstructured off-road autonomy has traditionally relied on semantic classification, resource-intensive dynamics models, or purely geometry-based methods to predict vehicle-terrain interactions. While inconsequential at low speeds, uneven terrain subjects our full-scale system to safety-critical challenges at operating speeds of 7--10 m/s. This study focuses particularly on uneven terrain such as hills, banks, and ditches. These common high-risk geometries are capable of disabling the vehicle and causing severe passenger injuries if poorly traversed. We introduce a physics-based framework for identifying traversability constraints on terrain dynamics. Using this framework, we derive two fundamental constraints, each with a focus on mitigating rollover and ditch-crossing failures while being fully parallelizable in the sample-based Model Predictive Control (MPC) framework. In addition, we present the design of our planning and control system, which implements our parallelized constraints in MPC and utilizes a low-level controller to meet the demands of our aggressive driving without prior information about the environment and its dynamics. Through real-world experimentation and traversal of hills and ditches, we demonstrate that our approach captures fundamental elements of safe and aggressive autonomy over uneven terrain. Our approach improves upon geometry-based methods by completing comprehensive off-road courses up to 22% faster while maintaining safe operation.
6/11/2024
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024
📈
MonoForce: Self-supervised Learning of Physics-aware Model for Predicting Robot-terrain Interaction
Ruslan Agishev, Karel Zimmermann, Vladim'ir Kubelka, Martin Pecka, Tom'av{s} Svoboda
0
0
While autonomous navigation of mobile robots on rigid terrain is a well-explored problem, navigating on deformable terrain such as tall grass or bushes remains a challenge. To address it, we introduce an explainable, physics-aware and end-to-end differentiable model which predicts the outcome of robot-terrain interaction from camera images, both on rigid and non-rigid terrain. The proposed MonoForce model consists of a black-box module which predicts robot-terrain interaction forces from onboard cameras, followed by a white-box module, which transforms these forces and a control signals into predicted trajectories, using only the laws of classical mechanics. The differentiable white-box module allows backpropagating the predicted trajectory errors into the black-box module, serving as a self-supervised loss that measures consistency between the predicted forces and ground-truth trajectories of the robot. Experimental evaluation on a public dataset and our data has shown that while the prediction capabilities are comparable to state-of-the-art algorithms on rigid terrain, MonoForce shows superior accuracy on non-rigid terrain such as tall grass or bushes. To facilitate the reproducibility of our results, we release both the code and datasets.
4/30/2024