Snail-Radar: A large-scale diverse dataset for the evaluation of 4D-radar-based SLAM systems

0

Sign in to get full access
Overview
- Presents a large-scale, diverse dataset called "Snail-Radar" for evaluating 4D radar-based SLAM (Simultaneous Localization and Mapping) systems
- The dataset includes data from various sensors, including 4D radar, cameras, and IMUs, captured in diverse environments and scenarios
- Aims to provide a comprehensive benchmark for assessing the performance of radar-based SLAM algorithms and enabling their development
Plain English Explanation
The paper introduces a new dataset called "Snail-Radar" that can be used to test and improve radar-based systems for mapping an environment and tracking the location of a moving robot or vehicle within that environment. This is a challenging problem known as SLAM (Simultaneous Localization and Mapping).
The Snail-Radar dataset includes data from multiple sensors, including 4D radar, cameras, and motion sensors (IMUs), captured in a wide variety of settings, such as indoor and outdoor environments, with different types of obstacles and moving objects. By providing this diverse and comprehensive dataset, the researchers aim to help researchers and engineers develop and evaluate radar-based SLAM algorithms that can work reliably in the real world.
Radar-based SLAM systems have the potential to be more robust and accurate than traditional vision-based SLAM, as they can operate in challenging conditions like darkness or fog where cameras struggle. However, developing these systems requires large, varied datasets for training and testing. The Snail-Radar dataset aims to fill this gap and accelerate progress in this important field of robotics and autonomous systems.
Technical Explanation
The paper presents the Snail-Radar dataset, a large-scale, diverse dataset for evaluating 4D radar-based SLAM systems. The dataset includes data from multiple sensors, including 4D radar, cameras, and inertial measurement units (IMUs), captured in a wide range of indoor and outdoor environments.
The dataset is designed to provide a comprehensive benchmark for assessing the performance of radar-based SLAM algorithms, enabling their development and improvement. It includes scenarios with diverse obstacles, dynamic objects, and environmental conditions, allowing SLAM systems to be tested in realistic and challenging settings.
The sensor data is captured using synchronized and calibrated sensor configurations, and the ground truth poses are obtained using high-precision motion capture systems. This ensures the dataset provides accurate and reliable reference data for evaluating SLAM algorithms.
The authors also present baseline SLAM results using state-of-the-art radar-based SLAM algorithms, demonstrating the dataset's utility for benchmarking and improving radar SLAM performance.
Critical Analysis
The Snail-Radar dataset is a valuable contribution to the field of radar-based SLAM, as it addresses the lack of large-scale, diverse datasets for evaluating these systems. The dataset's comprehensive coverage of indoor and outdoor scenarios, with a variety of obstacles and dynamic elements, provides a robust testing ground for SLAM algorithms.
However, the paper does not discuss potential limitations or biases in the dataset, such as the specific sensor configurations used or the distribution of environments and scenarios. It would be helpful for the authors to acknowledge these potential caveats and encourage users to think critically about the dataset's suitability for their particular research or application.
Additionally, the paper could have delved deeper into the baseline SLAM results presented, providing more detailed analysis and insights that could guide future research. Exploring failure cases or performance bottlenecks in the baseline algorithms would help researchers better understand the challenges and opportunities in radar-based SLAM.
Conclusion
The Snail-Radar dataset represents a significant advancement in the field of radar-based SLAM by providing a large-scale, diverse benchmark for evaluating these systems. The comprehensive sensor data and ground truth information can accelerate the development of more robust and accurate radar SLAM algorithms, which have the potential to enable new applications in robotics, autonomous vehicles, and beyond.
By making this dataset publicly available, the researchers have taken an important step in fostering progress and collaboration in this important area of research. As the field continues to evolve, the Snail-Radar dataset and similar resources will play a crucial role in driving innovation and real-world deployment of radar-based SLAM systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Snail-Radar: A large-scale diverse dataset for the evaluation of 4D-radar-based SLAM systems
Jianzhu Huai, Binliang Wang, Yuan Zhuang, Yiwen Chen, Qipeng Li, Yulong Han, Charles Toth
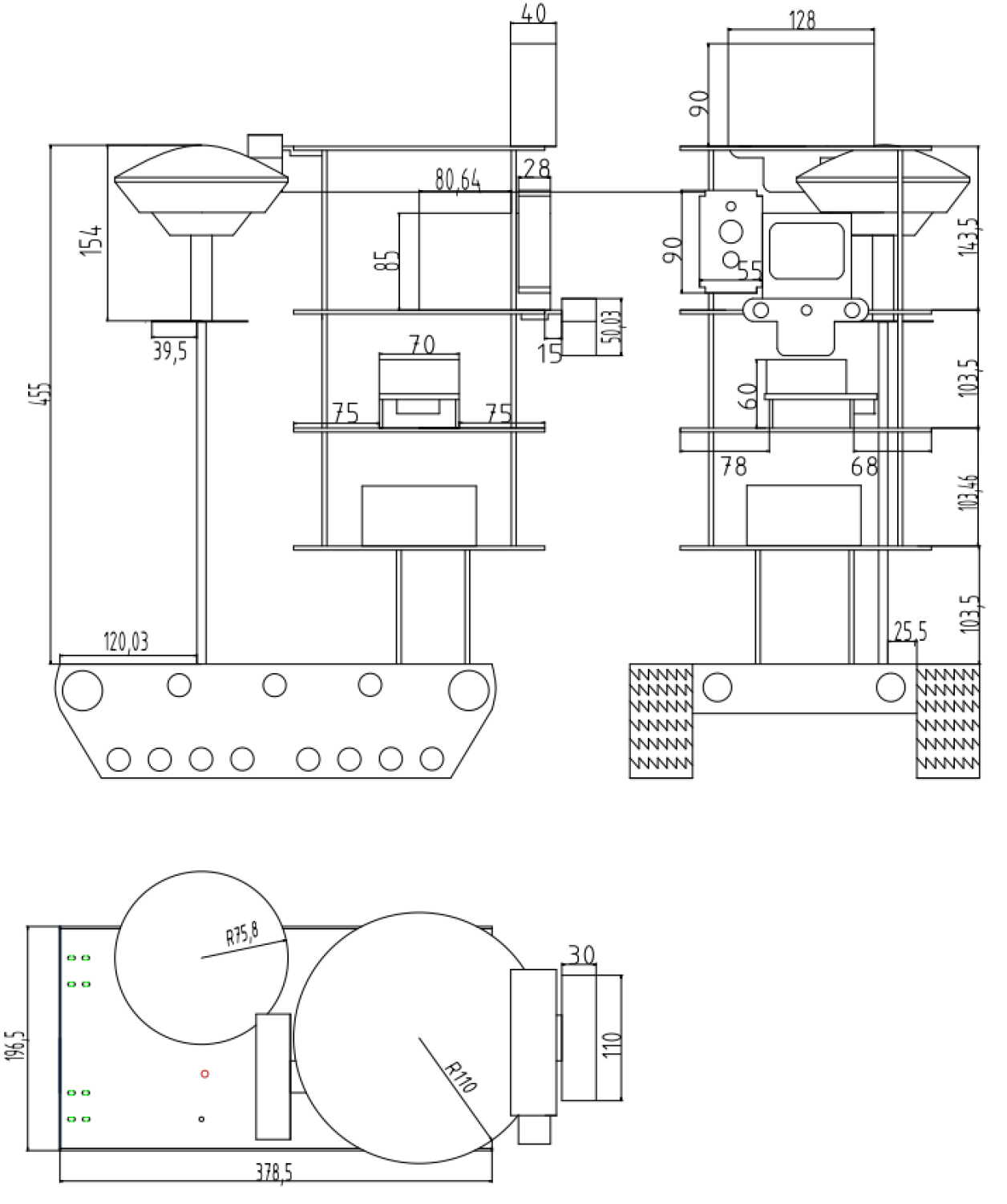
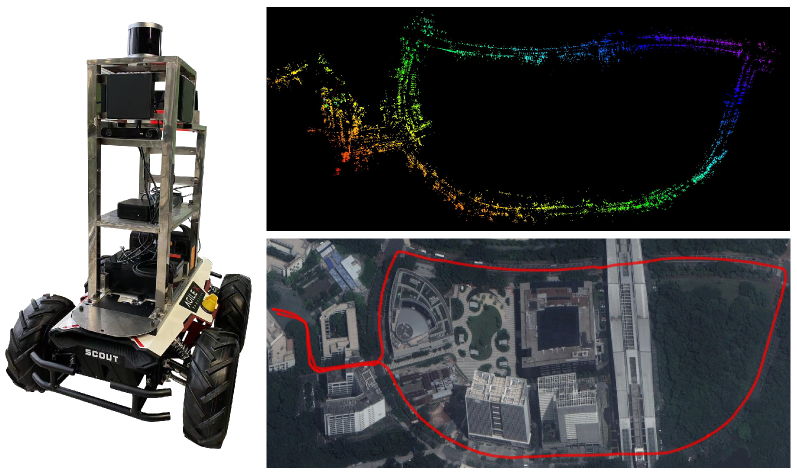
4D radars are increasingly favored for odometry and mapping of autonomous systems due to their robustness in harsh weather and dynamic environments. Existing datasets, however, often cover limited areas and are typically captured using a single platform. To address this gap, we present a diverse large-scale dataset specifically designed for 4D radar-based localization and mapping. This dataset was gathered using three different platforms: a handheld device, an e-bike, and an SUV, under a variety of environmental conditions, including clear days, nighttime, and heavy rain. The data collection occurred from September 2023 to February 2024, encompassing diverse settings such as roads in a vegetated campus and tunnels on highways. Each route was traversed multiple times to facilitate place recognition evaluations. The sensor suite included a 3D lidar, 4D radars, stereo cameras, consumer-grade IMUs, and a GNSS/INS system. Sensor data packets were synchronized to GNSS time using a two-step process: a convex hull algorithm was applied to smooth host time jitter, and then odometry and correlation algorithms were used to correct constant time offsets. Extrinsic calibration between sensors was achieved through manual measurements and subsequent nonlinear optimization. The reference motion for the platforms was generated by registering lidar scans to a terrestrial laser scanner (TLS) point cloud map using a lidar inertial odometry (LIO) method in localization mode. Additionally, a data reversion technique was introduced to enable backward LIO processing. We believe this dataset will boost research in radar-based point cloud registration, odometry, mapping, and place recognition.
Read more7/23/2024
0
DIDLM:A Comprehensive Multi-Sensor Dataset with Infrared Cameras, Depth Cameras, LiDAR, and 4D Millimeter-Wave Radar in Challenging Scenarios for 3D Mapping
WeiSheng Gong, Chen He, KaiJie Su, QingYong Li
This study presents a comprehensive multi-sensor dataset designed for 3D mapping in challenging indoor and outdoor environments. The dataset comprises data from infrared cameras, depth cameras, LiDAR, and 4D millimeter-wave radar, facilitating exploration of advanced perception and mapping techniques. Integration of diverse sensor data enhances perceptual capabilities in extreme conditions such as rain, snow, and uneven road surfaces. The dataset also includes interactive robot data at different speeds indoors and outdoors, providing a realistic background environment. Slam comparisons between similar routes are conducted, analyzing the influence of different complex scenes on various sensors. Various SLAM algorithms are employed to process the dataset, revealing performance differences among algorithms in different scenarios. In summary, this dataset addresses the problem of data scarcity in special environments, fostering the development of perception and mapping algorithms for extreme conditions. Leveraging multi-sensor data including infrared, depth cameras, LiDAR, 4D millimeter-wave radar, and robot interactions, the dataset advances intelligent mapping and perception capabilities.Our dataset is available at https://github.com/GongWeiSheng/DIDLM.
Read more4/16/2024
0
EFEAR-4D: Ego-Velocity Filtering for Efficient and Accurate 4D radar Odometry
Xiaoyi Wu, Yushuai Chen, Zhan Li, Ziyang Hong, Liang Hu
Odometry is a crucial component for successfully implementing autonomous navigation, relying on sensors such as cameras, LiDARs and IMUs. However, these sensors may encounter challenges in extreme weather conditions, such as snowfall and fog. The emergence of FMCW radar technology offers the potential for robust perception in adverse conditions. As the latest generation of FWCW radars, the 4D mmWave radar provides point cloud with range, azimuth, elevation, and Doppler velocity information, despite inherent sparsity and noises in the point cloud. In this paper, we propose EFEAR-4D, an accurate, highly efficient, and learning-free method for large-scale 4D radar odometry estimation. EFEAR-4D exploits Doppler velocity information delicately for robust ego-velocity estimation, resulting in a highly accurate prior guess. EFEAR-4D maintains robustness against point-cloud sparsity and noises across diverse environments through dynamic object removal and effective region-wise feature extraction. Extensive experiments on two publicly available 4D radar datasets demonstrate state-of-the-art reliability and localization accuracy of EFEAR-4D under various conditions. Furthermore, we have collected a dataset following the same route but varying installation heights of the 4D radar, emphasizing the significant impact of radar height on point cloud quality - a crucial consideration for real-world deployments. Our algorithm and dataset will be available soon at https://github.com/CLASS-Lab/EFEAR-4D.
Read more5/17/2024

0
FusionPortableV2: A Unified Multi-Sensor Dataset for Generalized SLAM Across Diverse Platforms and Scalable Environments
Hexiang Wei, Jianhao Jiao, Xiangcheng Hu, Jingwen Yu, Xupeng Xie, Jin Wu, Yilong Zhu, Yuxuan Liu, Lujia Wang, Ming Liu
Simultaneous Localization and Mapping (SLAM) technology has been widely applied in various robotic scenarios, from rescue operations to autonomous driving. However, the generalization of SLAM algorithms remains a significant challenge, as current datasets often lack scalability in terms of platforms and environments. To address this limitation, we present FusionPortableV2, a multi-sensor SLAM dataset featuring notable sensor diversity, varied motion patterns, and a wide range of environmental scenarios. Our dataset comprises $27$ sequences, spanning over $2.5$ hours and collected from four distinct platforms: a handheld suite, wheeled and legged robots, and vehicles. These sequences cover diverse settings, including buildings, campuses, and urban areas, with a total length of $38.7km$. Additionally, the dataset includes ground-truth (GT) trajectories and RGB point cloud maps covering approximately $0.3km^2$. To validate the utility of our dataset in advancing SLAM research, we assess several state-of-the-art (SOTA) SLAM algorithms. Furthermore, we demonstrate the dataset's broad applicability beyond traditional SLAM tasks by investigating its potential for monocular depth estimation. The complete dataset, including sensor data, GT, and calibration details, is accessible at https://fusionportable.github.io/dataset/fusionportable_v2.
Read more4/15/2024