SocialFormer: Social Interaction Modeling with Edge-enhanced Heterogeneous Graph Transformers for Trajectory Prediction

0

Sign in to get full access
Overview
- This paper presents SocialFormer, a method for modeling social interactions in trajectory prediction tasks using an edge-enhanced heterogeneous graph transformer.
- The key ideas are to capture both spatial and social features through a heterogeneous graph representation, and to enhance the graph with edge features that capture social interactions.
- The model is evaluated on several publicly available trajectory prediction datasets and shows improved performance compared to state-of-the-art methods.
Plain English Explanation
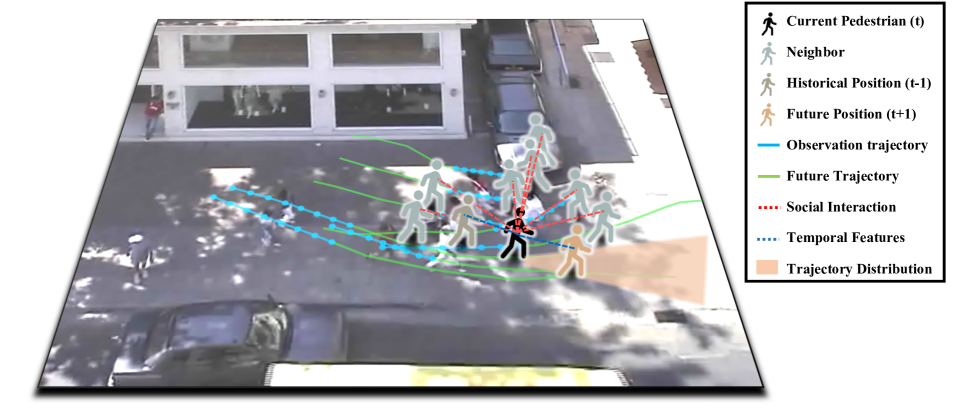
SocialFormer is a new approach for predicting the future movement of people or objects, such as pedestrians or vehicles, based on their past trajectories and social interactions. The core idea is to represent the scene as a graph, where each person or object is a node, and the connections between them (the edges) represent their social relationships and interactions.
To capture these social interactions, the model uses a special type of neural network called a "graph transformer." This allows the model to learn how the movement of one person or object is influenced by the movements and behaviors of the others around them. The researchers also enhanced the graph representation by adding extra information about the edges, such as the relative positions and velocities of the connected nodes.
By modeling both the spatial and social aspects of the scene in this way, the SocialFormer model is able to make more accurate predictions about where people or objects will move in the future, compared to previous methods that only looked at the past trajectories without considering the social context.
Technical Explanation
The key technical components of SocialFormer are:
-
Heterogeneous Graph Representation: The scene is represented as a graph, where each person or object is a node, and the edges between nodes represent their spatial and social relationships. This heterogeneous graph captures both the spatial and social features of the scene.
-
Edge-enhanced Graph Transformer: The graph transformer module learns to propagate information across the graph, allowing the model to reason about how the movement of one node (person/object) is influenced by the other nodes it is connected to. The researchers enhanced this by adding extra features to the edges, such as the relative positions and velocities of the connected nodes.
-
Trajectory Prediction: The output of the model is a probability distribution over the future trajectories of each person or object, based on the learned graph representation and the edge-enhanced graph transformer.
The model is evaluated on several publicly available trajectory prediction datasets, such as SDD, ETH, and VIRAT. The results show that SocialFormer outperforms state-of-the-art methods, demonstrating the benefits of the heterogeneous graph representation and the edge-enhanced graph transformer for capturing social interactions in trajectory prediction tasks.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the SocialFormer model, with comparisons to several state-of-the-art methods on multiple datasets. However, there are a few potential limitations and areas for further research:
-
Scalability: The heterogeneous graph representation and edge-enhanced transformer may become computationally expensive as the number of people/objects in the scene increases. The authors should discuss how the model would scale to larger and more complex scenarios.
-
Real-world Deployment: The paper focuses on benchmark datasets, but the authors should address how the model would perform in real-world applications, where data may be noisier and the scene may be more dynamic and unpredictable.
-
Interpretability: While the graph-based representation provides some intuition about the social interactions being modeled, the authors could explore ways to make the model's decision-making more interpretable and explainable to users.
-
Ethical Considerations: Trajectory prediction models like SocialFormer could raise privacy and security concerns if deployed in certain contexts, such as surveillance. The authors should discuss potential ethical implications and mitigation strategies.
Overall, the SocialFormer model represents an interesting and promising approach to trajectory prediction that could have important applications in areas like autonomous vehicles, crowd management, and sports analytics. Further research addressing the limitations mentioned above would help to strengthen the practical impact of this work.
Conclusion
The SocialFormer model introduces a novel approach to trajectory prediction that explicitly models the social interactions between people or objects in a scene. By representing the scene as a heterogeneous graph and using an edge-enhanced graph transformer, the model is able to capture both spatial and social features, leading to improved prediction accuracy compared to previous methods.
This research highlights the importance of considering social context when predicting future trajectories, and demonstrates the potential of graph-based representations and transformer architectures for this task. As trajectory prediction models like SocialFormer become more advanced and robust, they could have far-reaching applications in areas such as autonomous navigation, crowd management, and sports analytics, helping to make these systems more responsive and adaptive to the social dynamics of the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SocialFormer: Social Interaction Modeling with Edge-enhanced Heterogeneous Graph Transformers for Trajectory Prediction
Zixu Wang, Zhigang Sun, Juergen Luettin, Lavdim Halilaj
Accurate trajectory prediction is crucial for ensuring safe and efficient autonomous driving. However, most existing methods overlook complex interactions between traffic participants that often govern their future trajectories. In this paper, we propose SocialFormer, an agent interaction-aware trajectory prediction method that leverages the semantic relationship between the target vehicle and surrounding vehicles by making use of the road topology. We also introduce an edge-enhanced heterogeneous graph transformer (EHGT) as the aggregator in a graph neural network (GNN) to encode the semantic and spatial agent interaction information. Additionally, we introduce a temporal encoder based on gated recurrent units (GRU) to model the temporal social behavior of agent movements. Finally, we present an information fusion framework that integrates agent encoding, lane encoding, and agent interaction encoding for a holistic representation of the traffic scene. We evaluate SocialFormer for the trajectory prediction task on the popular nuScenes benchmark and achieve state-of-the-art performance.
Read more5/8/2024
🔮
0
SemanticFormer: Holistic and Semantic Traffic Scene Representation for Trajectory Prediction using Knowledge Graphs
Zhigang Sun, Zixu Wang, Lavdim Halilaj, Juergen Luettin
Trajectory prediction in autonomous driving relies on accurate representation of all relevant contexts of the driving scene, including traffic participants, road topology, traffic signs, as well as their semantic relations to each other. Despite increased attention to this issue, most approaches in trajectory prediction do not consider all of these factors sufficiently. We present SemanticFormer, an approach for predicting multimodal trajectories by reasoning over a semantic traffic scene graph using a hybrid approach. It utilizes high-level information in the form of meta-paths, i.e. trajectories on which an agent is allowed to drive from a knowledge graph which is then processed by a novel pipeline based on multiple attention mechanisms to predict accurate trajectories. SemanticFormer comprises a hierarchical heterogeneous graph encoder to capture spatio-temporal and relational information across agents as well as between agents and road elements. Further, it includes a predictor to fuse different encodings and decode trajectories with probabilities. Finally, a refinement module assesses permitted meta-paths of trajectories and speed profiles to obtain final predicted trajectories. Evaluation of the nuScenes benchmark demonstrates improved performance compared to several SOTA methods. In addition, we demonstrate that our knowledge graph can be easily added to two graph-based existing SOTA methods, namely VectorNet and Laformer, replacing their original homogeneous graphs. The evaluation results suggest that by adding our knowledge graph the performance of the original methods is enhanced by 5% and 4%, respectively.
Read more7/2/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024
🔮
0
VT-Former: An Exploratory Study on Vehicle Trajectory Prediction for Highway Surveillance through Graph Isomorphism and Transformer
Armin Danesh Pazho, Ghazal Alinezhad Noghre, Vinit Katariya, Hamed Tabkhi
Enhancing roadway safety has become an essential computer vision focus area for Intelligent Transportation Systems (ITS). As a part of ITS, Vehicle Trajectory Prediction (VTP) aims to forecast a vehicle's future positions based on its past and current movements. VTP is a pivotal element for road safety, aiding in applications such as traffic management, accident prevention, work-zone safety, and energy optimization. While most works in this field focus on autonomous driving, with the growing number of surveillance cameras, another sub-field emerges for surveillance VTP with its own set of challenges. In this paper, we introduce VT-Former, a novel transformer-based VTP approach for highway safety and surveillance. In addition to utilizing transformers to capture long-range temporal patterns, a new Graph Attentive Tokenization (GAT) module has been proposed to capture intricate social interactions among vehicles. This study seeks to explore both the advantages and the limitations inherent in combining transformer architecture with graphs for VTP. Our investigation, conducted across three benchmark datasets from diverse surveillance viewpoints, showcases the State-of-the-Art (SotA) or comparable performance of VT-Former in predicting vehicle trajectories. This study underscores the potential of VT-Former and its architecture, opening new avenues for future research and exploration.
Read more4/24/2024