SplatFields: Neural Gaussian Splats for Sparse 3D and 4D Reconstruction

0
🧠
Sign in to get full access
Overview
- Digitizing 3D static scenes and 4D dynamic events from multi-view images is a long-standing challenge in computer vision and graphics.
- 3D Gaussian Splatting (3DGS) has emerged as a practical and scalable reconstruction method with impressive quality, real-time rendering, and compatibility with visualization tools.
- However, 3DGS requires a substantial number of input views, which is a significant practical bottleneck, especially for capturing dynamic scenes.
- The lack of spatial autocorrelation of splat features is identified as a factor contributing to the suboptimal performance of 3DGS in sparse reconstruction settings.
Plain English Explanation
Researchers have been trying for a long time to create 3D models of objects and scenes, as well as 4D models that capture movement over time, using multiple camera views. Recently, a method called 3D Gaussian Splatting (3DGS) has become popular because it can create high-quality 3D and 4D models, render them in real-time, and work well with common visualization tools.
However, the 3DGS method requires a large number of camera views to work well, which can be a significant practical problem, especially when trying to capture dynamic scenes that are constantly changing. The researchers think one reason 3DGS doesn't work as well with fewer camera views is that the features of the "splats" (the individual pieces that make up the 3D model) don't have a strong spatial relationship to each other.
To address this issue, the researchers propose a new optimization strategy that treats the splat features as outputs of an implicit neural network. This helps regularize the splat features and improves the reconstruction quality, even when there are fewer camera views available. Their approach works well for both static and dynamic scenes, as they demonstrate through extensive testing.
Technical Explanation
The paper proposes an optimization strategy to enhance the performance of the 3D Gaussian Splatting (3DGS) reconstruction method in sparse multi-view settings. The key insight is that the lack of spatial autocorrelation in the splat features contributes to the suboptimal performance of 3DGS in these scenarios.
To address this, the researchers model the splat features as the outputs of a corresponding implicit neural field. This effectively regularizes the splat features, leading to a consistent improvement in reconstruction quality across various static and dynamic scenes, as demonstrated through extensive testing.
The proposed optimization strategy is shown to handle both static and dynamic cases effectively, as validated by the researchers through experiments with different setup complexities and scene types. The method's performance enhancements are particularly significant in scenarios with limited camera views, addressing a key practical limitation of the original 3DGS technique.
Critical Analysis
The paper presents a novel approach to enhance the performance of the 3DGS reconstruction method, particularly in sparse multi-view settings. The researchers identify a critical issue with the lack of spatial autocorrelation in splat features and propose an effective solution by modeling them as implicit neural fields.
While the results demonstrate significant improvements in reconstruction quality across a range of scenarios, the paper could further explore the limitations and potential drawbacks of the proposed approach. For example, the computational complexity and training requirements of the implicit neural field model could be investigated, as well as its sensitivity to hyperparameter tuning or the choice of neural network architecture.
Additionally, the paper could delve deeper into the theoretical underpinnings of the spatial autocorrelation issue and how the implicit neural field formulation addresses it. A more rigorous analysis of the model's properties and the underlying principles guiding the observed performance enhancements would strengthen the paper's technical contributions.
Overall, the research presents a promising direction for improving 3D and 4D reconstruction from sparse multi-view inputs, which has important implications for practical applications in computer vision and graphics. However, further exploration of the method's limitations and potential extensions could enhance the paper's impact and provide a more comprehensive understanding of the proposed approach.
Conclusion
This paper introduces an optimization strategy that enhances the performance of the 3D Gaussian Splatting (3DGS) reconstruction method, particularly in sparse multi-view settings. By modeling the splat features as outputs of an implicit neural field, the researchers effectively regularize the spatial relationships between the splats, leading to consistent improvements in reconstruction quality for both static and dynamic scenes.
The proposed approach addresses a critical practical limitation of the original 3DGS technique, which requires a substantial number of input views to achieve high-quality results. By improving the method's performance in sparse multi-view scenarios, the researchers have expanded the potential applications of 3DGS in computer vision and graphics, where capturing dynamic events or scenes with limited camera setups is often a challenge.
The insights and techniques presented in this paper offer a promising direction for further research and development in 3D and 4D reconstruction, with the potential to drive advancements in areas such as virtual and augmented reality, autonomous systems, and digital content creation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
New!SplatFields: Neural Gaussian Splats for Sparse 3D and 4D Reconstruction
Marko Mihajlovic, Sergey Prokudin, Siyu Tang, Robert Maier, Federica Bogo, Tony Tung, Edmond Boyer
Digitizing 3D static scenes and 4D dynamic events from multi-view images has long been a challenge in computer vision and graphics. Recently, 3D Gaussian Splatting (3DGS) has emerged as a practical and scalable reconstruction method, gaining popularity due to its impressive reconstruction quality, real-time rendering capabilities, and compatibility with widely used visualization tools. However, the method requires a substantial number of input views to achieve high-quality scene reconstruction, introducing a significant practical bottleneck. This challenge is especially severe in capturing dynamic scenes, where deploying an extensive camera array can be prohibitively costly. In this work, we identify the lack of spatial autocorrelation of splat features as one of the factors contributing to the suboptimal performance of the 3DGS technique in sparse reconstruction settings. To address the issue, we propose an optimization strategy that effectively regularizes splat features by modeling them as the outputs of a corresponding implicit neural field. This results in a consistent enhancement of reconstruction quality across various scenarios. Our approach effectively handles static and dynamic cases, as demonstrated by extensive testing across different setups and scene complexities.
Read more9/18/2024

0
Optimizing 3D Gaussian Splatting for Sparse Viewpoint Scene Reconstruction
Shen Chen, Jiale Zhou, Lei Li
3D Gaussian Splatting (3DGS) has emerged as a promising approach for 3D scene representation, offering a reduction in computational overhead compared to Neural Radiance Fields (NeRF). However, 3DGS is susceptible to high-frequency artifacts and demonstrates suboptimal performance under sparse viewpoint conditions, thereby limiting its applicability in robotics and computer vision. To address these limitations, we introduce SVS-GS, a novel framework for Sparse Viewpoint Scene reconstruction that integrates a 3D Gaussian smoothing filter to suppress artifacts. Furthermore, our approach incorporates a Depth Gradient Profile Prior (DGPP) loss with a dynamic depth mask to sharpen edges and 2D diffusion with Score Distillation Sampling (SDS) loss to enhance geometric consistency in novel view synthesis. Experimental evaluations on the MipNeRF-360 and SeaThru-NeRF datasets demonstrate that SVS-GS markedly improves 3D reconstruction from sparse viewpoints, offering a robust and efficient solution for scene understanding in robotics and computer vision applications.
Read more9/6/2024
0
Recent Advances in 3D Gaussian Splatting
Tong Wu, Yu-Jie Yuan, Ling-Xiao Zhang, Jie Yang, Yan-Pei Cao, Ling-Qi Yan, Lin Gao
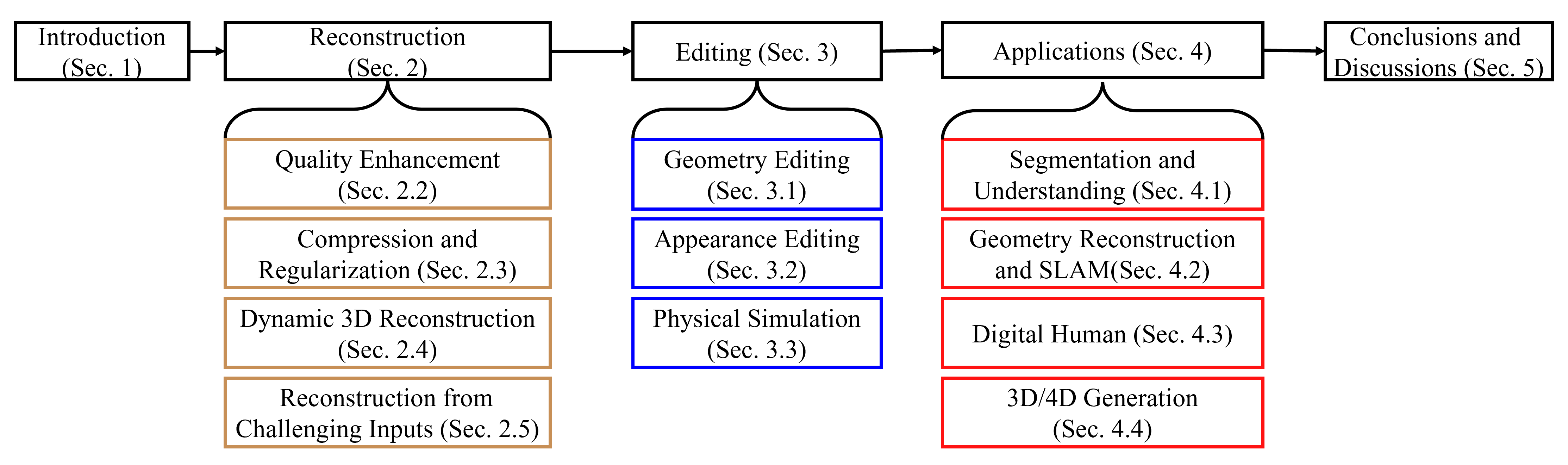
The emergence of 3D Gaussian Splatting (3DGS) has greatly accelerated the rendering speed of novel view synthesis. Unlike neural implicit representations like Neural Radiance Fields (NeRF) that represent a 3D scene with position and viewpoint-conditioned neural networks, 3D Gaussian Splatting utilizes a set of Gaussian ellipsoids to model the scene so that efficient rendering can be accomplished by rasterizing Gaussian ellipsoids into images. Apart from the fast rendering speed, the explicit representation of 3D Gaussian Splatting facilitates editing tasks like dynamic reconstruction, geometry editing, and physical simulation. Considering the rapid change and growing number of works in this field, we present a literature review of recent 3D Gaussian Splatting methods, which can be roughly classified into 3D reconstruction, 3D editing, and other downstream applications by functionality. Traditional point-based rendering methods and the rendering formulation of 3D Gaussian Splatting are also illustrated for a better understanding of this technique. This survey aims to help beginners get into this field quickly and provide experienced researchers with a comprehensive overview, which can stimulate the future development of the 3D Gaussian Splatting representation.
Read more4/16/2024

0
4D Gaussian Splatting for Real-Time Dynamic Scene Rendering
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, Xinggang Wang
Representing and rendering dynamic scenes has been an important but challenging task. Especially, to accurately model complex motions, high efficiency is usually hard to guarantee. To achieve real-time dynamic scene rendering while also enjoying high training and storage efficiency, we propose 4D Gaussian Splatting (4D-GS) as a holistic representation for dynamic scenes rather than applying 3D-GS for each individual frame. In 4D-GS, a novel explicit representation containing both 3D Gaussians and 4D neural voxels is proposed. A decomposed neural voxel encoding algorithm inspired by HexPlane is proposed to efficiently build Gaussian features from 4D neural voxels and then a lightweight MLP is applied to predict Gaussian deformations at novel timestamps. Our 4D-GS method achieves real-time rendering under high resolutions, 82 FPS at an 800$times$800 resolution on an RTX 3090 GPU while maintaining comparable or better quality than previous state-of-the-art methods. More demos and code are available at https://guanjunwu.github.io/4dgs/.
Read more7/16/2024