Optimizing 3D Gaussian Splatting for Sparse Viewpoint Scene Reconstruction

0

Sign in to get full access
Overview
- The paper presents an optimization technique for 3D Gaussian splatting, a method used for sparse viewpoint scene reconstruction.
- Sparse viewpoint scene reconstruction is the process of generating a 3D model of a scene from a limited number of camera views.
- The proposed optimization technique aims to improve the quality and efficiency of this reconstruction process.
Plain English Explanation
Imagine you want to create a 3D model of a room, but you only have a few photos taken from different angles. This is a sparse viewpoint scenario, where you don't have a complete set of images to work with.
The researchers in this paper developed a way to improve the process of turning those limited photos into a 3D model. They used a technique called 3D Gaussian splatting, which involves representing the scene as a collection of 3D "splats" or overlapping circles.
The key innovation in this paper is an optimization method that makes the 3D Gaussian splatting process more efficient and produces higher-quality results, even with just a few camera views. This could be useful for applications like virtual reality, 3D modeling, and super-resolution imaging.
Technical Explanation
The paper introduces a new optimization technique for 3D Gaussian splatting, a method used in sparse viewpoint scene reconstruction. In this approach, the 3D scene is represented as a collection of overlapping Gaussian "splats" that are projected onto the available camera views.
The key contributions of the paper are:
-
Optimized Splatting: The researchers developed an optimization algorithm that adjusts the size, position, and orientation of the Gaussian splats to better fit the observed camera views. This improves the accuracy and efficiency of the reconstruction process.
-
Sparsity-Aware Regularization: The optimization incorporates a sparsity-aware regularization term, which encourages a more compact representation of the scene and reduces redundant splats.
-
Efficient Optimization: The paper presents an efficient optimization strategy that can be implemented in parallel, allowing for fast, high-quality 3D reconstructions from sparse viewpoints.
The authors evaluate their approach on several real-world datasets and demonstrate significant improvements in reconstruction quality and computational efficiency compared to previous 3D Gaussian splatting methods.
Critical Analysis
The paper provides a well-designed optimization technique that advances the state-of-the-art in sparse viewpoint scene reconstruction using 3D Gaussian splatting. However, there are a few potential limitations and areas for further research:
-
Sensitivity to Initialization: The optimization process may be sensitive to the initial placement and parameters of the Gaussian splats. Further investigation into robust initialization strategies could improve the reliability of the method.
-
Handling Occlusions: The paper does not explicitly address the problem of occlusions, where objects in the scene block the view of other objects. Developing techniques to handle occlusions could expand the applicability of the method.
-
Real-time Performance: While the proposed optimization is efficient, it may not be fast enough for real-time applications, such as 360-degree video synthesis. Investigating further optimization or parallelization techniques could enhance the real-time capabilities of the approach.
-
Generalization to Other Domains: The paper focuses on 3D scene reconstruction, but the optimization principles could potentially be applied to other domains that utilize Gaussian splatting, such as point cloud processing or image super-resolution. Exploring these extensions could expand the impact of the research.
Overall, the paper presents a valuable contribution to the field of sparse viewpoint scene reconstruction, with the potential for further refinement and broader application.
Conclusion
The paper introduces an optimized 3D Gaussian splatting technique for sparse viewpoint scene reconstruction. The proposed optimization algorithm improves the accuracy and efficiency of the reconstruction process by adjusting the size, position, and orientation of the Gaussian splats while incorporating a sparsity-aware regularization term. The authors demonstrate the effectiveness of their approach on real-world datasets, showcasing significant improvements over previous methods.
This research advances the state-of-the-art in sparse viewpoint reconstruction and has the potential to benefit a wide range of applications, such as virtual reality, 3D modeling, and super-resolution imaging. While the paper highlights some areas for further improvement, the core innovation represents an important step forward in this field of computer vision and graphics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Optimizing 3D Gaussian Splatting for Sparse Viewpoint Scene Reconstruction
Shen Chen, Jiale Zhou, Lei Li
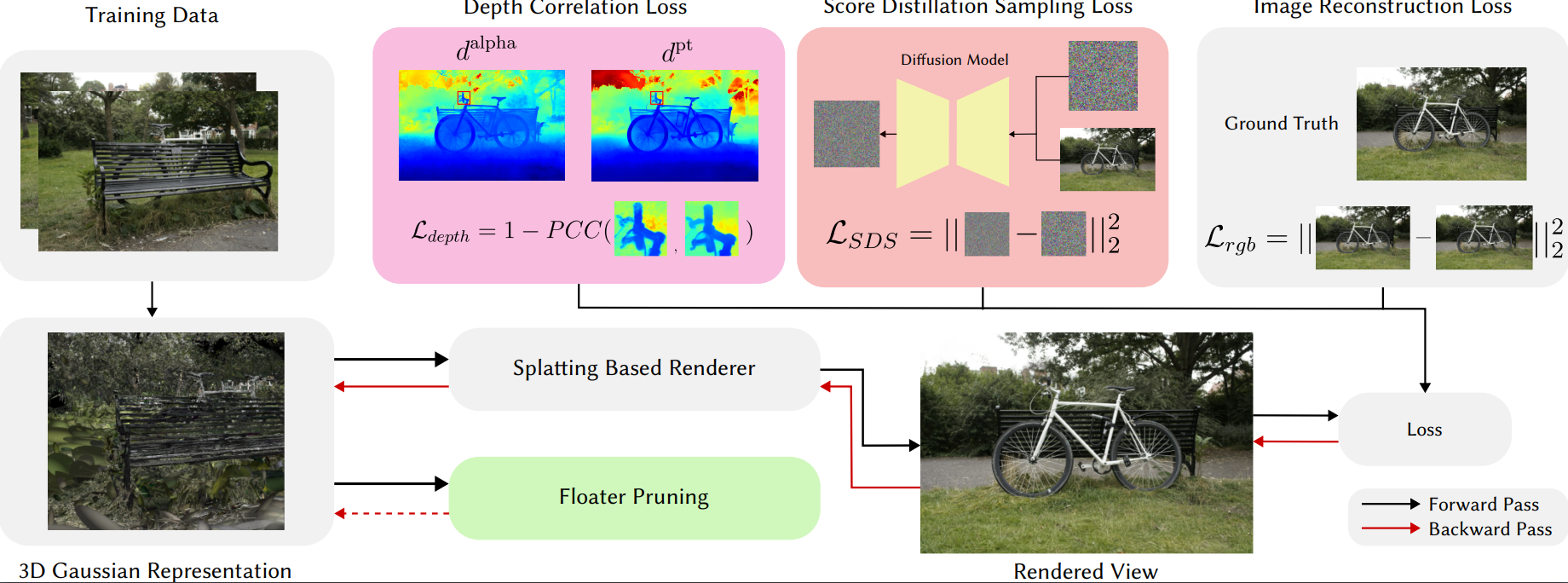
3D Gaussian Splatting (3DGS) has emerged as a promising approach for 3D scene representation, offering a reduction in computational overhead compared to Neural Radiance Fields (NeRF). However, 3DGS is susceptible to high-frequency artifacts and demonstrates suboptimal performance under sparse viewpoint conditions, thereby limiting its applicability in robotics and computer vision. To address these limitations, we introduce SVS-GS, a novel framework for Sparse Viewpoint Scene reconstruction that integrates a 3D Gaussian smoothing filter to suppress artifacts. Furthermore, our approach incorporates a Depth Gradient Profile Prior (DGPP) loss with a dynamic depth mask to sharpen edges and 2D diffusion with Score Distillation Sampling (SDS) loss to enhance geometric consistency in novel view synthesis. Experimental evaluations on the MipNeRF-360 and SeaThru-NeRF datasets demonstrate that SVS-GS markedly improves 3D reconstruction from sparse viewpoints, offering a robust and efficient solution for scene understanding in robotics and computer vision applications.
Read more9/6/2024
0
SparseGS: Real-Time 360{deg} Sparse View Synthesis using Gaussian Splatting
Haolin Xiong, Sairisheek Muttukuru, Rishi Upadhyay, Pradyumna Chari, Achuta Kadambi
The problem of novel view synthesis has grown significantly in popularity recently with the introduction of Neural Radiance Fields (NeRFs) and other implicit scene representation methods. A recent advance, 3D Gaussian Splatting (3DGS), leverages an explicit representation to achieve real-time rendering with high-quality results. However, 3DGS still requires an abundance of training views to generate a coherent scene representation. In few shot settings, similar to NeRF, 3DGS tends to overfit to training views, causing background collapse and excessive floaters, especially as the number of training views are reduced. We propose a method to enable training coherent 3DGS-based radiance fields of 360-degree scenes from sparse training views. We integrate depth priors with generative and explicit constraints to reduce background collapse, remove floaters, and enhance consistency from unseen viewpoints. Experiments show that our method outperforms base 3DGS by 6.4% in LPIPS and by 12.2% in PSNR, and NeRF-based methods by at least 17.6% in LPIPS on the MipNeRF-360 dataset with substantially less training and inference cost.
Read more5/14/2024
🧠
0
New!SplatFields: Neural Gaussian Splats for Sparse 3D and 4D Reconstruction
Marko Mihajlovic, Sergey Prokudin, Siyu Tang, Robert Maier, Federica Bogo, Tony Tung, Edmond Boyer
Digitizing 3D static scenes and 4D dynamic events from multi-view images has long been a challenge in computer vision and graphics. Recently, 3D Gaussian Splatting (3DGS) has emerged as a practical and scalable reconstruction method, gaining popularity due to its impressive reconstruction quality, real-time rendering capabilities, and compatibility with widely used visualization tools. However, the method requires a substantial number of input views to achieve high-quality scene reconstruction, introducing a significant practical bottleneck. This challenge is especially severe in capturing dynamic scenes, where deploying an extensive camera array can be prohibitively costly. In this work, we identify the lack of spatial autocorrelation of splat features as one of the factors contributing to the suboptimal performance of the 3DGS technique in sparse reconstruction settings. To address the issue, we propose an optimization strategy that effectively regularizes splat features by modeling them as the outputs of a corresponding implicit neural field. This results in a consistent enhancement of reconstruction quality across various scenarios. Our approach effectively handles static and dynamic cases, as demonstrated by extensive testing across different setups and scene complexities.
Read more9/18/2024

0
LoopSparseGS: Loop Based Sparse-View Friendly Gaussian Splatting
Zhenyu Bao, Guibiao Liao, Kaichen Zhou, Kanglin Liu, Qing Li, Guoping Qiu
Despite the photorealistic novel view synthesis (NVS) performance achieved by the original 3D Gaussian splatting (3DGS), its rendering quality significantly degrades with sparse input views. This performance drop is mainly caused by the limited number of initial points generated from the sparse input, insufficient supervision during the training process, and inadequate regularization of the oversized Gaussian ellipsoids. To handle these issues, we propose the LoopSparseGS, a loop-based 3DGS framework for the sparse novel view synthesis task. In specific, we propose a loop-based Progressive Gaussian Initialization (PGI) strategy that could iteratively densify the initialized point cloud using the rendered pseudo images during the training process. Then, the sparse and reliable depth from the Structure from Motion, and the window-based dense monocular depth are leveraged to provide precise geometric supervision via the proposed Depth-alignment Regularization (DAR). Additionally, we introduce a novel Sparse-friendly Sampling (SFS) strategy to handle oversized Gaussian ellipsoids leading to large pixel errors. Comprehensive experiments on four datasets demonstrate that LoopSparseGS outperforms existing state-of-the-art methods for sparse-input novel view synthesis, across indoor, outdoor, and object-level scenes with various image resolutions.
Read more8/2/2024