SplatLoc: 3D Gaussian Splatting-based Visual Localization for Augmented Reality

0

Sign in to get full access
Overview
- SplatLoc is a visual localization system for augmented reality (AR) that uses 3D Gaussian splatting to accurately track camera poses.
- It leverages the strengths of both feature-based and direct methods to provide robust and efficient localization.
- The key contributions include a novel 3D Gaussian splatting-based feature representation and an efficient camera pose refinement algorithm.
Plain English Explanation
SplatLoc is a system that allows devices like smartphones or AR headsets to figure out their exact position and orientation in the 3D world. This is an important capability for AR applications, where digital content needs to be precisely overlaid on the real world.
SplatLoc: 3D Gaussian Splatting-based Visual Localization for Augmented Reality uses a technique called "3D Gaussian splatting" to create a detailed 3D map of the environment. When the device moves around, it can compare what it sees to this map and quickly calculate its precise location and orientation.
This approach combines the strengths of two common techniques for visual localization - feature-based methods that look for distinctive landmarks, and direct methods that analyze the entire image. By using 3D Gaussian splatting, SplatLoc gets the best of both worlds, providing robust and efficient tracking of the device's pose.
Technical Explanation
SplatLoc: 3D Gaussian Splatting-based Visual Localization for Augmented Reality proposes a novel visual localization system that uses 3D Gaussian splatting to create a detailed map of the environment. This map encodes both geometric and appearance information, allowing for accurate camera pose estimation.
The key technical contributions include:
-
3D Gaussian Splatting-based Feature Representation: The system represents the environment using a dense 3D point cloud, where each point is modeled as a 3D Gaussian distribution. This provides a continuous and smooth representation that can better handle sensor noise and occlusions compared to traditional discrete point clouds.
-
Efficient Camera Pose Refinement: The system uses an efficient optimization-based approach to refine the camera pose by aligning the current image to the 3D Gaussian splatting map. This allows for robust and real-time localization performance.
The paper demonstrates the effectiveness of SplatLoc through extensive experiments on both synthetic and real-world datasets. The results show that SplatLoc outperforms state-of-the-art visual localization methods in terms of accuracy and efficiency, making it a promising solution for AR applications.
Critical Analysis
The paper provides a thorough technical explanation of the SplatLoc system and its key contributions. The authors have done a good job of addressing important challenges in visual localization, such as handling sensor noise and occlusions, and achieving efficient pose estimation.
However, the paper does not discuss certain limitations or potential issues with the proposed approach. For example, it is unclear how the system would perform in highly dynamic environments with moving objects, or how it would scale to large-scale environments. Additionally, the computational cost of the 3D Gaussian splatting representation and optimization-based pose refinement could be a concern for resource-constrained devices.
Further research could explore ways to address these limitations, such as incorporating dynamic object handling or investigating efficient approximations of the Gaussian splatting model. Comparative studies with other state-of-the-art localization methods in diverse real-world scenarios would also help better understand the strengths and weaknesses of the SplatLoc approach.
Conclusion
SplatLoc: 3D Gaussian Splatting-based Visual Localization for Augmented Reality presents a promising solution for accurate and efficient visual localization in augmented reality applications. By leveraging the advantages of both feature-based and direct methods through 3D Gaussian splatting, the system demonstrates robust and real-time performance on various datasets.
While the paper provides a solid technical foundation, further research is needed to address potential limitations and explore the system's scalability and adaptability to diverse real-world scenarios. Nonetheless, the core ideas and contributions of SplatLoc offer valuable insights for the development of advanced visual localization systems, which are crucial for the widespread adoption and success of augmented reality technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SplatLoc: 3D Gaussian Splatting-based Visual Localization for Augmented Reality
Hongjia Zhai, Xiyu Zhang, Boming Zhao, Hai Li, Yijia He, Zhaopeng Cui, Hujun Bao, Guofeng Zhang
Visual localization plays an important role in the applications of Augmented Reality (AR), which enable AR devices to obtain their 6-DoF pose in the pre-build map in order to render virtual content in real scenes. However, most existing approaches can not perform novel view rendering and require large storage capacities for maps. To overcome these limitations, we propose an efficient visual localization method capable of high-quality rendering with fewer parameters. Specifically, our approach leverages 3D Gaussian primitives as the scene representation. To ensure precise 2D-3D correspondences for pose estimation, we develop an unbiased 3D scene-specific descriptor decoder for Gaussian primitives, distilled from a constructed feature volume. Additionally, we introduce a salient 3D landmark selection algorithm that selects a suitable primitive subset based on the saliency score for localization. We further regularize key Gaussian primitives to prevent anisotropic effects, which also improves localization performance. Extensive experiments on two widely used datasets demonstrate that our method achieves superior or comparable rendering and localization performance to state-of-the-art implicit-based visual localization approaches. Project page: href{https://zju3dv.github.io/splatloc}{https://zju3dv.github.io/splatloc}.
Read more9/24/2024

0
GSplatLoc: Grounding Keypoint Descriptors into 3D Gaussian Splatting for Improved Visual Localization
Gennady Sidorov, Malik Mohrat, Ksenia Lebedeva, Ruslan Rakhimov, Sergey Kolyubin
Although various visual localization approaches exist, such as scene coordinate and pose regression, these methods often struggle with high memory consumption or extensive optimization requirements. To address these challenges, we utilize recent advancements in novel view synthesis, particularly 3D Gaussian Splatting (3DGS), to enhance localization. 3DGS allows for the compact encoding of both 3D geometry and scene appearance with its spatial features. Our method leverages the dense description maps produced by XFeat's lightweight keypoint detection and description model. We propose distilling these dense keypoint descriptors into 3DGS to improve the model's spatial understanding, leading to more accurate camera pose predictions through 2D-3D correspondences. After estimating an initial pose, we refine it using a photometric warping loss. Benchmarking on popular indoor and outdoor datasets shows that our approach surpasses state-of-the-art Neural Render Pose (NRP) methods, including NeRFMatch and PNeRFLoc.
Read more9/26/2024

0
GSLoc: Efficient Camera Pose Refinement via 3D Gaussian Splatting
Changkun Liu, Shuai Chen, Yash Bhalgat, Siyan Hu, Ming Cheng, Zirui Wang, Victor Adrian Prisacariu, Tristan Braud
We leverage 3D Gaussian Splatting (3DGS) as a scene representation and propose a novel test-time camera pose refinement framework, GSLoc. This framework enhances the localization accuracy of state-of-the-art absolute pose regression and scene coordinate regression methods. The 3DGS model renders high-quality synthetic images and depth maps to facilitate the establishment of 2D-3D correspondences. GSLoc obviates the need for training feature extractors or descriptors by operating directly on RGB images, utilizing the 3D foundation model, MASt3R, for precise 2D matching. To improve the robustness of our model in challenging outdoor environments, we incorporate an exposure-adaptive module within the 3DGS framework. Consequently, GSLoc enables efficient one-shot pose refinement given a single RGB query and a coarse initial pose estimation. Our proposed approach surpasses leading NeRF-based optimization methods in both accuracy and runtime across indoor and outdoor visual localization benchmarks, achieving new state-of-the-art accuracy on two indoor datasets.
Read more10/3/2024
0
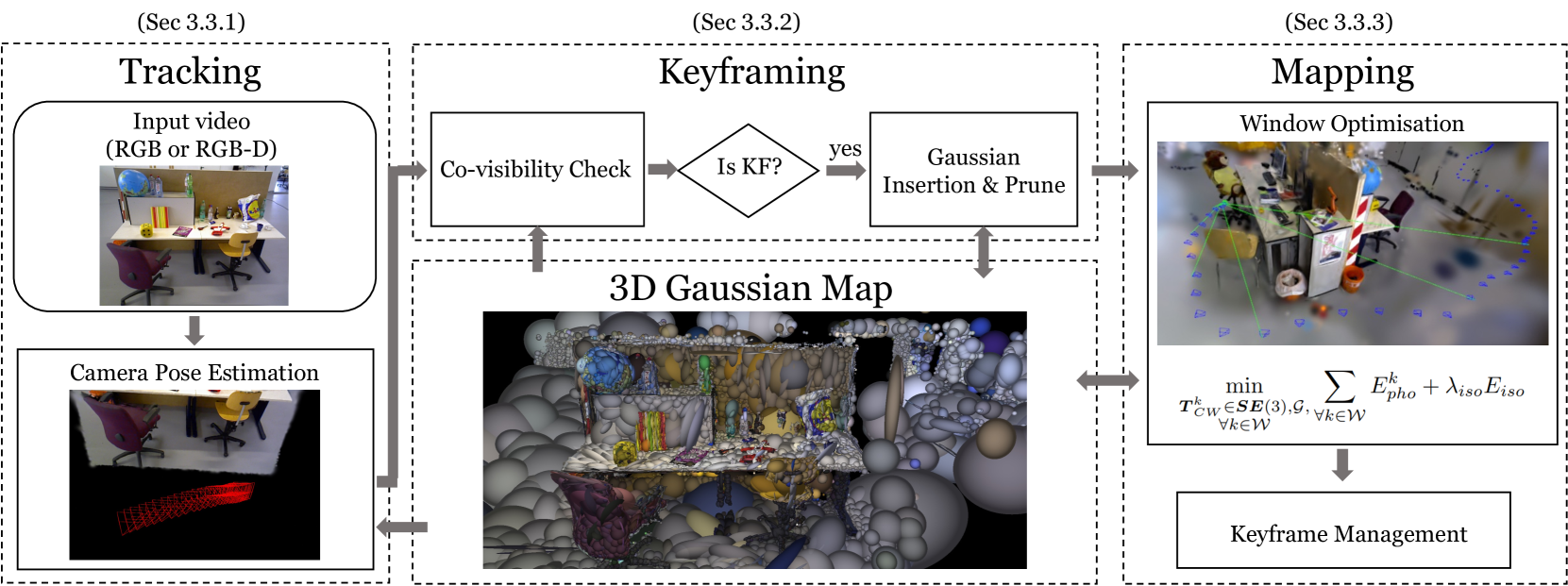
Gaussian Splatting SLAM
Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, Andrew J. Davison
We present the first application of 3D Gaussian Splatting in monocular SLAM, the most fundamental but the hardest setup for Visual SLAM. Our method, which runs live at 3fps, utilises Gaussians as the only 3D representation, unifying the required representation for accurate, efficient tracking, mapping, and high-quality rendering. Designed for challenging monocular settings, our approach is seamlessly extendable to RGB-D SLAM when an external depth sensor is available. Several innovations are required to continuously reconstruct 3D scenes with high fidelity from a live camera. First, to move beyond the original 3DGS algorithm, which requires accurate poses from an offline Structure from Motion (SfM) system, we formulate camera tracking for 3DGS using direct optimisation against the 3D Gaussians, and show that this enables fast and robust tracking with a wide basin of convergence. Second, by utilising the explicit nature of the Gaussians, we introduce geometric verification and regularisation to handle the ambiguities occurring in incremental 3D dense reconstruction. Finally, we introduce a full SLAM system which not only achieves state-of-the-art results in novel view synthesis and trajectory estimation but also reconstruction of tiny and even transparent objects.
Read more4/16/2024