GSLoc: Efficient Camera Pose Refinement via 3D Gaussian Splatting

0

Sign in to get full access
Overview
- Efficient Camera Pose Refinement via 3D Gaussian Splatting is a research paper that presents a novel approach for refining the camera pose estimation in computer vision tasks.
- The key idea is to use 3D Gaussian splatting to efficiently integrate depth information and incorporate uncertainty in the pose estimation process.
- The proposed method is shown to outperform existing techniques in terms of accuracy and computational efficiency.
Plain English Explanation
The paper addresses the challenge of accurately estimating the position and orientation (pose) of a camera in a 3D scene. This is an essential task in many computer vision applications, such as augmented reality, robotics, and 3D reconstruction.
The researchers introduce a new technique called "3D Gaussian Splatting" to refine the camera pose. The basic idea is to represent the 3D scene as a collection of Gaussian distributions, which can effectively capture the uncertainty in the depth information. By integrating this depth data into the pose estimation process, the method can achieve more accurate and robust camera pose estimates compared to previous approaches.
The key advantage of 3D Gaussian Splatting is its efficiency. Rather than relying on computationally expensive optimization techniques, the method can quickly and accurately update the camera pose by efficiently processing the Gaussian depth representations. This makes it well-suited for real-time applications, such as visual SLAM and augmented reality, where fast and reliable pose estimation is crucial.
Technical Explanation
The paper proposes a novel camera pose refinement method based on 3D Gaussian splatting. The core idea is to represent the 3D scene as a collection of Gaussian distributions, where each Gaussian models the uncertainty in the depth information at a specific 3D location.
During the pose refinement process, the method efficiently integrates these 3D Gaussian representations to update the camera pose. Specifically, the algorithm computes the gradients of the Gaussian depth maps with respect to the camera pose parameters, and then uses these gradients to update the pose via an optimization procedure.
The key advantages of the 3D Gaussian Splatting approach are:
-
Efficient Depth Integration: By representing depth information as Gaussians, the method can quickly and accurately integrate depth data into the pose estimation process, without relying on computationally expensive optimization techniques.
-
Uncertainty Modeling: The Gaussian representations naturally capture the uncertainty in the depth information, which helps the pose refinement algorithm be more robust to noise and outliers in the input data.
-
Generalizability: The proposed method is shown to be applicable to a wide range of computer vision tasks, including augmented reality, robotics, and 3D reconstruction, demonstrating its versatility and generalizability.
The paper presents extensive experiments on both synthetic and real-world datasets, comparing the performance of 3D Gaussian Splatting to existing camera pose refinement techniques. The results demonstrate that the proposed method outperforms the state-of-the-art in terms of pose estimation accuracy and computational efficiency.
Critical Analysis
The paper presents a well-designed and thoroughly evaluated technique for camera pose refinement. The use of 3D Gaussian splatting to efficiently integrate depth information and incorporate uncertainty is a novel and promising approach.
One potential limitation of the method is that it assumes the availability of accurate depth information, which may not always be the case in real-world scenarios. The paper does not discuss how the method would perform in the absence of reliable depth data or in the presence of significant occlusions or missing information in the scene.
Additionally, the paper focuses on the pose refinement task and does not explore the implications of the 3D Gaussian representation for other computer vision applications, such as 3D reconstruction or object recognition. Investigating the broader applicability of the Gaussian splatting technique could be an interesting avenue for future research.
Conclusion
The paper presents a highly efficient and accurate camera pose refinement method based on 3D Gaussian splatting. By representing the 3D scene as a collection of Gaussian distributions, the proposed technique can quickly and robustly integrate depth information into the pose estimation process, outperforming existing approaches.
The key strengths of the method are its computational efficiency, ability to model depth uncertainty, and generalizability to a wide range of computer vision tasks. These characteristics make the 3D Gaussian Splatting technique a valuable contribution to the field, with the potential to enable more robust and reliable camera pose estimation in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GSLoc: Efficient Camera Pose Refinement via 3D Gaussian Splatting
Changkun Liu, Shuai Chen, Yash Bhalgat, Siyan Hu, Zirui Wang, Ming Cheng, Victor Adrian Prisacariu, Tristan Braud
We leverage 3D Gaussian Splatting (3DGS) as a scene representation and propose a novel test-time camera pose refinement framework, GSLoc. This framework enhances the localization accuracy of state-of-the-art absolute pose regression and scene coordinate regression methods. The 3DGS model renders high-quality synthetic images and depth maps to facilitate the establishment of 2D-3D correspondences. GSLoc obviates the need for training feature extractors or descriptors by operating directly on RGB images, utilizing the 3D vision foundation model, MASt3R, for precise 2D matching. To improve the robustness of our model in challenging outdoor environments, we incorporate an exposure-adaptive module within the 3DGS framework. Consequently, GSLoc enables efficient pose refinement given a single RGB query and a coarse initial pose estimation. Our proposed approach surpasses leading NeRF-based optimization methods in both accuracy and runtime across indoor and outdoor visual localization benchmarks, achieving state-of-the-art accuracy on two indoor datasets.
Read more8/22/2024

0
Robust Gaussian Splatting
Franc{c}ois Darmon, Lorenzo Porzi, Samuel Rota-Bul`o, Peter Kontschieder
In this paper, we address common error sources for 3D Gaussian Splatting (3DGS) including blur, imperfect camera poses, and color inconsistencies, with the goal of improving its robustness for practical applications like reconstructions from handheld phone captures. Our main contribution involves modeling motion blur as a Gaussian distribution over camera poses, allowing us to address both camera pose refinement and motion blur correction in a unified way. Additionally, we propose mechanisms for defocus blur compensation and for addressing color in-consistencies caused by ambient light, shadows, or due to camera-related factors like varying white balancing settings. Our proposed solutions integrate in a seamless way with the 3DGS formulation while maintaining its benefits in terms of training efficiency and rendering speed. We experimentally validate our contributions on relevant benchmark datasets including Scannet++ and Deblur-NeRF, obtaining state-of-the-art results and thus consistent improvements over relevant baselines.
Read more4/8/2024
🗣️
0
GS-SLAM: Dense Visual SLAM with 3D Gaussian Splatting
Chi Yan, Delin Qu, Dan Xu, Bin Zhao, Zhigang Wang, Dong Wang, Xuelong Li
In this paper, we introduce textbf{GS-SLAM} that first utilizes 3D Gaussian representation in the Simultaneous Localization and Mapping (SLAM) system. It facilitates a better balance between efficiency and accuracy. Compared to recent SLAM methods employing neural implicit representations, our method utilizes a real-time differentiable splatting rendering pipeline that offers significant speedup to map optimization and RGB-D rendering. Specifically, we propose an adaptive expansion strategy that adds new or deletes noisy 3D Gaussians in order to efficiently reconstruct new observed scene geometry and improve the mapping of previously observed areas. This strategy is essential to extend 3D Gaussian representation to reconstruct the whole scene rather than synthesize a static object in existing methods. Moreover, in the pose tracking process, an effective coarse-to-fine technique is designed to select reliable 3D Gaussian representations to optimize camera pose, resulting in runtime reduction and robust estimation. Our method achieves competitive performance compared with existing state-of-the-art real-time methods on the Replica, TUM-RGBD datasets. Project page: https://gs-slam.github.io/.
Read more4/9/2024
0
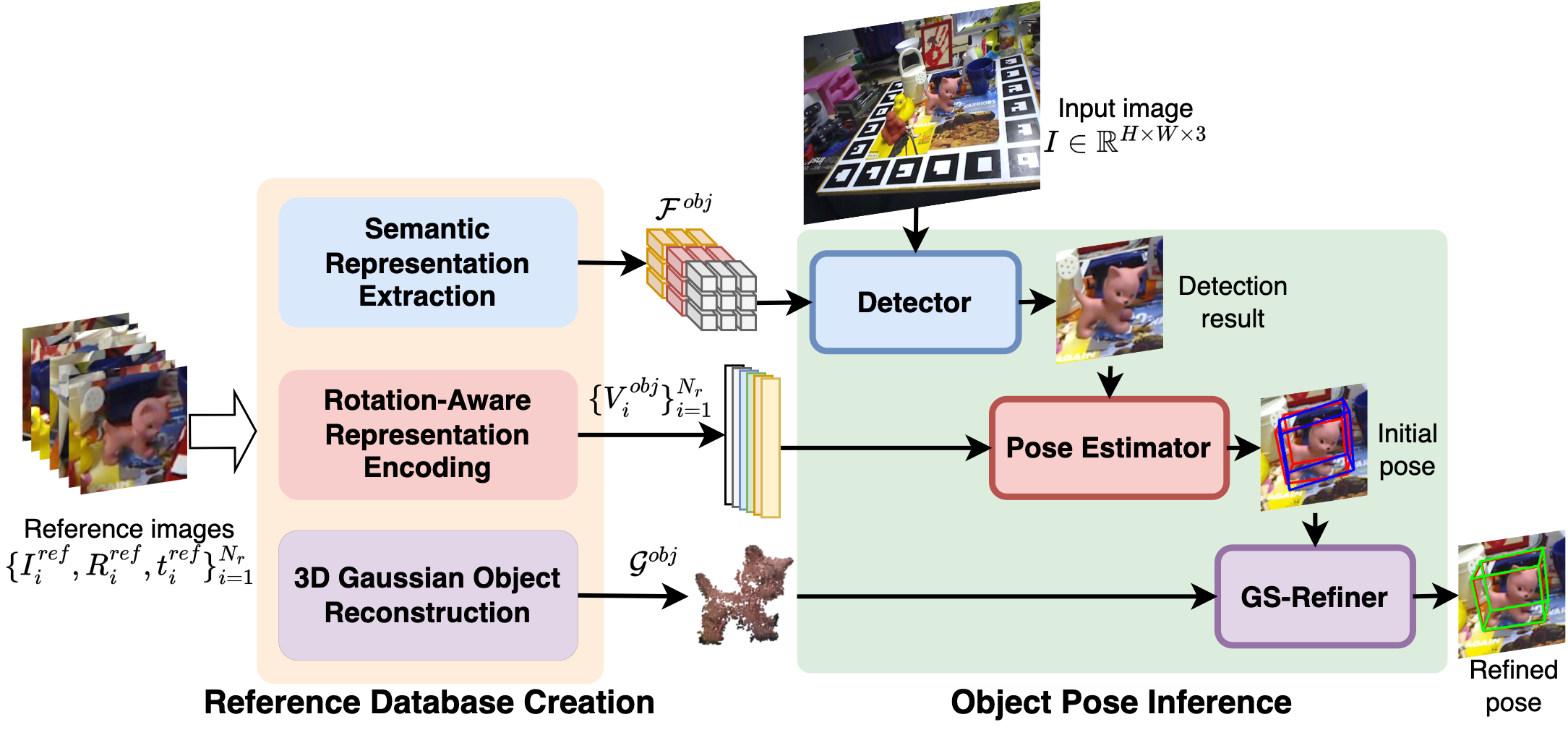
GS-Pose: Generalizable Segmentation-based 6D Object Pose Estimation with 3D Gaussian Splatting
Dingding Cai, Janne Heikkila, Esa Rahtu
This paper introduces GS-Pose, a unified framework for localizing and estimating the 6D pose of novel objects. GS-Pose begins with a set of posed RGB images of a previously unseen object and builds three distinct representations stored in a database. At inference, GS-Pose operates sequentially by locating the object in the input image, estimating its initial 6D pose using a retrieval approach, and refining the pose with a render-and-compare method. The key insight is the application of the appropriate object representation at each stage of the process. In particular, for the refinement step, we leverage 3D Gaussian splatting, a novel differentiable rendering technique that offers high rendering speed and relatively low optimization time. Off-the-shelf toolchains and commodity hardware, such as mobile phones, can be used to capture new objects to be added to the database. Extensive evaluations on the LINEMOD and OnePose-LowTexture datasets demonstrate excellent performance, establishing the new state-of-the-art. Project page: https://dingdingcai.github.io/gs-pose.
Read more8/15/2024