Stabilizing Dynamic Systems through Neural Network Learning: A Robust Approach

0

Sign in to get full access
Overview
- This paper presents a robust approach for stabilizing dynamic systems using neural network learning.
- The approach involves learning a Lyapunov energy function from demonstrations, which is then used to stabilize the system and guarantee its convergence to a desired limit cycle.
- The method is designed to be robust to disturbances and can handle a wide range of dynamic systems, including those with chaotic behavior.
Plain English Explanation
In this paper, the researchers propose a way to help dynamic systems - systems that change over time - become more stable and predictable. They do this by using a type of artificial intelligence called a neural network to learn an "energy function" that describes the system's behavior.
The energy function acts like a map, showing how the system moves from one state to another. By learning this function from examples of the system in action, the researchers can then use it to guide the system back towards a desired, stable state, even if the system is experiencing disturbances or chaotic behavior.
This approach is designed to be robust, meaning it can handle a wide range of different dynamic systems and still keep them stable and predictable. The researchers test their method on several example systems, showing that it can effectively stabilize the systems and keep them converging towards the desired state, even as the dynamics of the system change over time.
Technical Explanation
The key idea in this paper is to learn a Lyapunov energy function that can be used to stabilize a dynamic system. The Lyapunov function acts as a Lyapunov certificate, guaranteeing the stability and convergence of the system to a desired limit cycle.
The authors propose a neural network-based approach to learn the Lyapunov function from demonstrations of the system's behavior. They show that this learned Lyapunov function can be used to design a stabilizing controller that drives the system towards the desired limit cycle, even in the presence of disturbances.
The method is evaluated on several example dynamic systems, including a chaotic system. The results demonstrate the effectiveness of the approach in stabilizing the systems and ensuring convergence to the desired limit cycle. The authors also discuss the robustness of the method, showing that it can handle a wide range of dynamic systems and disturbances.
Critical Analysis
The paper presents a promising approach for stabilizing dynamic systems using neural network learning. The authors' insight to learn a Lyapunov energy function from demonstrations is particularly interesting, as it allows the method to be applied to a broad range of systems without requiring detailed modeling or analysis.
However, the paper does not address the potential challenges of learning an accurate Lyapunov function, especially for complex or high-dimensional systems. The stability and convergence guarantees provided by the Lyapunov function may also be sensitive to the quality of the learned model, which could limit the practical applicability of the method.
Additionally, the paper focuses on stabilizing systems around a desired limit cycle, but does not discuss how the method could be extended to more general control objectives, such as stabilizing the system around an arbitrary reference trajectory.
Further research would be needed to explore the scalability and generalization capabilities of the proposed approach, as well as to investigate potential ways to improve the robustness and performance of the learning-based stabilization method.
Conclusion
This paper presents a novel approach for stabilizing dynamic systems using neural network learning. By learning a Lyapunov energy function from demonstrations, the method can effectively guide the system towards a desired limit cycle, even in the presence of disturbances or chaotic behavior.
The robustness and generality of the approach make it a promising tool for a wide range of applications, from robotics and control systems to biological and economic models. While the paper leaves room for further research and development, it represents an important step towards leveraging the power of machine learning to tackle the challenge of stabilizing complex, dynamic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Stabilizing Dynamic Systems through Neural Network Learning: A Robust Approach
Yu Zhang, Haoyu Zhang, Yongxiang Zou, Houcheng Li, Long Cheng
Point-to-point and periodic motions are ubiquitous in the world of robotics. To master these motions, Autonomous Dynamic System (DS) based algorithms are fundamental in the domain of Learning from Demonstration (LfD). However, these algorithms face the significant challenge of balancing precision in learning with the maintenance of system stability. This paper addresses this challenge by presenting a novel ADS algorithm that leverages neural network technology. The proposed algorithm is designed to distill essential knowledge from demonstration data, ensuring stability during the learning of both point-to-point and periodic motions. For point-to-point motions, a neural Lyapunov function is proposed to align with the provided demonstrations. In the case of periodic motions, the neural Lyapunov function is used with the transversal contraction to ensure that all generated motions converge to a stable limit cycle. The model utilizes a streamlined neural network architecture, adept at achieving dual objectives: optimizing learning accuracy while maintaining global stability. To thoroughly assess the efficacy of the proposed algorithm, rigorous evaluations are conducted using the LASA dataset and a manually designed dataset. These assessments were complemented by empirical validation through robotic experiments, providing robust evidence of the algorithm's performance
Read more7/16/2024
🧠
0
Learning a Stable Dynamic System with a Lyapunov Energy Function for Demonstratives Using Neural Networks
Yu Zhang, Yongxiang Zou, Haoyu Zhang, Xiuze Xia, Long Cheng
Autonomous Dynamic System (DS)-based algorithms hold a pivotal and foundational role in the field of Learning from Demonstration (LfD). Nevertheless, they confront the formidable challenge of striking a delicate balance between achieving precision in learning and ensuring the overall stability of the system. In response to this substantial challenge, this paper introduces a novel DS algorithm rooted in neural network technology. This algorithm not only possesses the capability to extract critical insights from demonstration data but also demonstrates the capacity to learn a candidate Lyapunov energy function that is consistent with the provided data. The model presented in this paper employs a straightforward neural network architecture that excels in fulfilling a dual objective: optimizing accuracy while simultaneously preserving global stability. To comprehensively evaluate the effectiveness of the proposed algorithm, rigorous assessments are conducted using the LASA dataset, further reinforced by empirical validation through a robotic experiment.
Read more4/30/2024

0
Learning Deep Dynamical Systems using Stable Neural ODEs
Andreas Sochopoulos, Michael Gienger, Sethu Vijayakumar
Learning complex trajectories from demonstrations in robotic tasks has been effectively addressed through the utilization of Dynamical Systems (DS). State-of-the-art DS learning methods ensure stability of the generated trajectories; however, they have three shortcomings: a) the DS is assumed to have a single attractor, which limits the diversity of tasks it can achieve, b) state derivative information is assumed to be available in the learning process and c) the state of the DS is assumed to be measurable at inference time. We propose a class of provably stable latent DS with possibly multiple attractors, that inherit the training methods of Neural Ordinary Differential Equations, thus, dropping the dependency on state derivative information. A diffeomorphic mapping for the output and a loss that captures time-invariant trajectory similarity are proposed. We validate the efficacy of our approach through experiments conducted on a public dataset of handwritten shapes and within a simulated object manipulation task.
Read more4/17/2024
0
Dynamical stability and chaos in artificial neural network trajectories along training
Kaloyan Danovski, Miguel C. Soriano, Lucas Lacasa
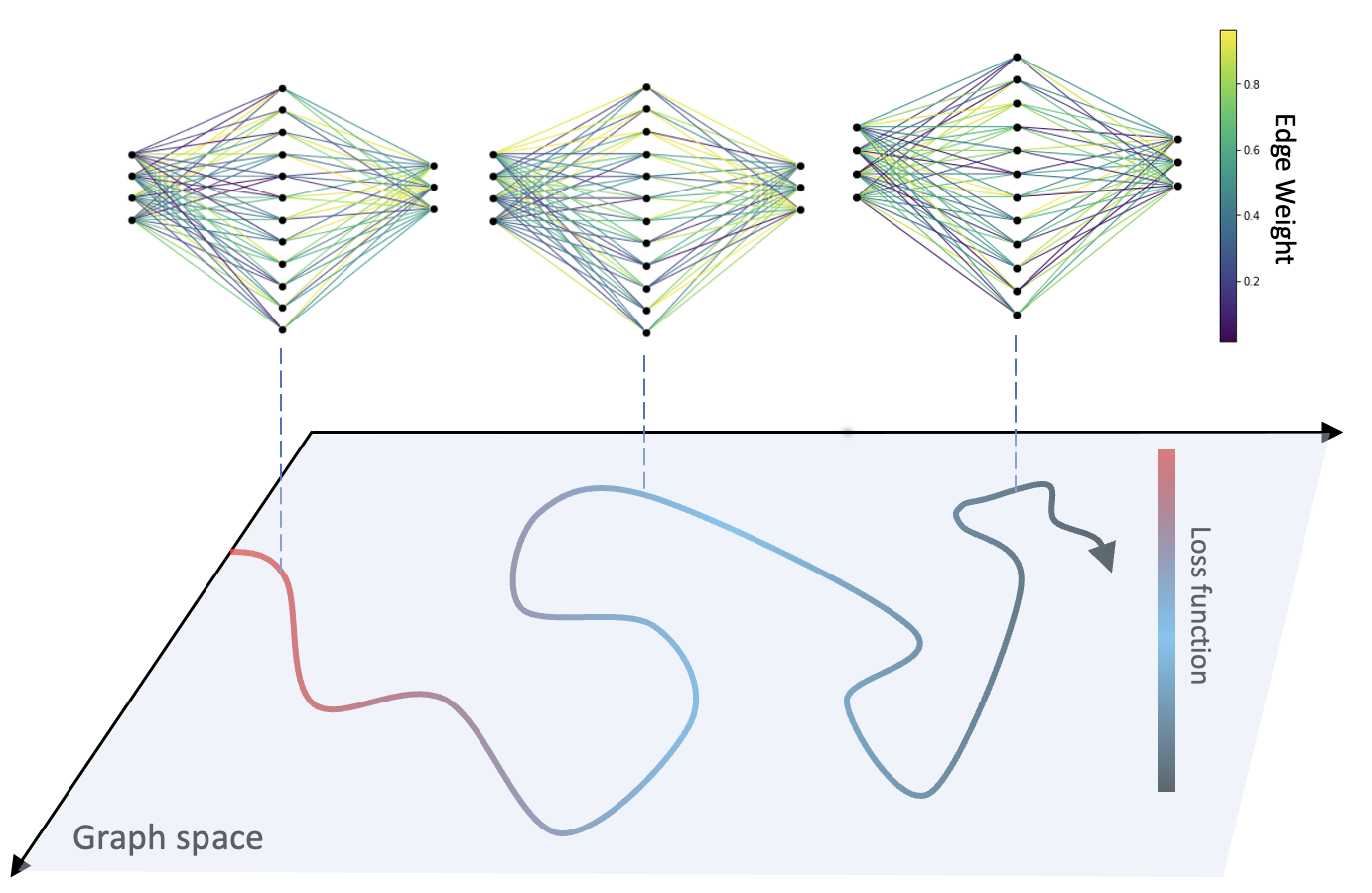
The process of training an artificial neural network involves iteratively adapting its parameters so as to minimize the error of the network's prediction, when confronted with a learning task. This iterative change can be naturally interpreted as a trajectory in network space -- a time series of networks -- and thus the training algorithm (e.g. gradient descent optimization of a suitable loss function) can be interpreted as a dynamical system in graph space. In order to illustrate this interpretation, here we study the dynamical properties of this process by analyzing through this lens the network trajectories of a shallow neural network, and its evolution through learning a simple classification task. We systematically consider different ranges of the learning rate and explore both the dynamical and orbital stability of the resulting network trajectories, finding hints of regular and chaotic behavior depending on the learning rate regime. Our findings are put in contrast to common wisdom on convergence properties of neural networks and dynamical systems theory. This work also contributes to the cross-fertilization of ideas between dynamical systems theory, network theory and machine learning
Read more4/10/2024