Style Alignment based Dynamic Observation Method for UAV-View Geo-localization

0

Sign in to get full access
Related Work
Several existing approaches have explored the challenge of UAV-view geo-localization, where a UAV's location is determined based on visual information from its onboard camera.
One relevant line of research is semantic segmentation guided approach for ground-to-aerial image matching. This approach uses semantic information to better align ground-level and aerial images, improving localization accuracy.
Another key area is large-scale datasets for UAV visual localization, which provide the training data needed for machine learning models to learn the visual features and relationships needed for geo-localization.
In addition, deep homography estimation techniques for UAV thermal imagery geo-localization have shown promise by leveraging the unique perspective and thermal signatures captured by UAV cameras.
Relatedly, work on preserving relative localization in drone swarms with limited field-of-view highlights the challenges of maintaining accurate positioning in multi-UAV scenarios.
Finally, clustering-based learning approaches for UAV tracking and pose estimation demonstrate how machine learning can be used to infer a UAV's location and orientation from visual data.
Overall, this existing research provides valuable context and insights that inform the present work on style alignment for UAV geo-localization.
Overview
- The paper proposes a "Style Alignment based Dynamic Observation Method" for improving UAV-view geo-localization.
- The key innovations include:
- Using style alignment to better match UAV imagery to ground-level reference data.
- Incorporating a hierarchical attention mechanism to dynamically focus on the most informative visual features.
- Demonstrating state-of-the-art performance on a large-scale UAV localization dataset.
Plain English Explanation
Determining the exact location of a UAV (drone) based on the images it captures is an important but challenging task. This paper introduces a new approach to address this problem of "UAV-view geo-localization".
The core insight is that simply matching the visual features between aerial UAV images and ground-level reference data is not enough. Instead, the researchers found that "aligning the style" of the two types of imagery is crucial for accurate localization.
Imagine you're trying to find your location on a map by comparing the view from your window to the map. Even if the visual features like buildings and roads match up, the overall "style" - the lighting, colors, and perspective - will be quite different between the real-world view and the flat map. This mismatch makes it hard to pinpoint your exact location.
The proposed method tackles this challenge by dynamically focusing the system's attention on the most relevant visual cues for matching the UAV imagery to the ground-level references. It does this using a hierarchical attention mechanism, which allows the model to adaptively emphasize the most informative features.
Importantly, the paper demonstrates that this style-aligned, attention-based approach outperforms previous state-of-the-art methods on a large-scale UAV localization dataset. This suggests the technique could be valuable for real-world applications like autonomous navigation, aerial surveying, and emergency response.
Technical Explanation
The paper introduces a "Style Alignment based Dynamic Observation Method" for improving UAV-view geo-localization. The key technical components include:
-
Style Alignment: The method uses style transfer techniques to align the visual style (e.g. colors, textures, lighting) between the UAV imagery and ground-level reference data. This helps bridge the gap between the different perspectives and visual characteristics of the two data sources.
-
Hierarchical Attention: The system incorporates a hierarchical attention mechanism that dynamically focuses on the most informative visual features for matching the UAV images to the ground references. This allows the model to adaptively emphasize the most relevant cues for accurate localization.
-
Large-Scale Evaluation: The paper evaluates the proposed approach on a large-scale UAV localization dataset, demonstrating state-of-the-art performance compared to prior methods. This suggests the technique has strong potential for real-world applications.
The overall architecture involves feeding the UAV images and ground-level reference data into a deep neural network. The network first aligns the visual styles of the two data sources, then uses the hierarchical attention mechanism to identify the most salient features for geo-localization. Finally, the model predicts the UAV's location based on this refined feature representation.
Extensive experiments on the benchmarking dataset show the style alignment and attention components both contribute significantly to the performance improvements achieved by the proposed method.
Critical Analysis
The paper presents a compelling approach to the challenging problem of UAV-view geo-localization. The key strengths are the innovative use of style alignment and the adaptive hierarchical attention mechanism, which together seem to provide substantial performance gains over previous methods.
However, the paper does not address certain limitations or potential issues that could be important in real-world deployments. For example, the evaluation is limited to a single large-scale dataset, and it's unclear how the method would generalize to different environments, camera setups, or UAV platforms.
Additionally, the computational complexity and runtime efficiency of the proposed approach are not discussed. In many UAV applications, such as autonomous navigation or time-sensitive emergency response, latency and resource constraints are crucial factors.
Further research could also explore ways to make the style alignment and attention components more robust and generalizable. For instance, the style transfer process could be made more adaptive or unsupervised, reducing the reliance on paired training data.
Overall, while the paper makes a valuable contribution, there are still opportunities to refine and expand the techniques to address a broader range of practical considerations for UAV geo-localization in the real world.
Conclusion
This paper presents a novel "Style Alignment based Dynamic Observation Method" for improving the accuracy of UAV-view geo-localization. By aligning the visual styles between aerial UAV imagery and ground-level reference data, and incorporating a hierarchical attention mechanism to focus on the most informative features, the proposed approach demonstrates state-of-the-art performance on a large-scale dataset.
The key innovations - style alignment and hierarchical attention - address fundamental challenges in bridging the gap between the UAV's perspective and the ground-level references used for localization. This suggests the technique could have significant practical value for a range of UAV applications, such as autonomous navigation, aerial surveying, and emergency response.
While the paper provides a strong technical foundation, further research is needed to fully understand the method's real-world limitations and potential. Aspects like generalization, computational efficiency, and robustness to diverse environments and setups should be explored to further advance the state of the art in UAV geo-localization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Style Alignment based Dynamic Observation Method for UAV-View Geo-localization
Jie Shao, LingHao Jiang
The task of UAV-view geo-localization is to estimate the localization of a query satellite/drone image by matching it against a reference dataset consisting of drone/satellite images. Though tremendous strides have been made in feature alignment between satellite and drone views, vast differences in both inter and intra-class due to changes in viewpoint, altitude, and lighting remain a huge challenge. In this paper, a style alignment based dynamic observation method for UAV-view geo-localization is proposed to meet the above challenges from two perspectives: visual style transformation and surrounding noise control. Specifically, we introduce a style alignment strategy to transfrom the diverse visual style of drone-view images into a unified satellite images visual style. Then a dynamic observation module is designed to evaluate the spatial distribution of images by mimicking human observation habits. It is featured by the hierarchical attention block (HAB) with a dual-square-ring stream structure, to reduce surrounding noise and geographical deformation. In addition, we propose a deconstruction loss to push away features of different geo-tags and squeeze knowledge from unmatched images by correlation calculation. The experimental results demonstrate the state-of-the-art performance of our model on benchmarked datasets. In particular, when compared to the prior art on University-1652, our results surpass the best of them (FSRA), while only requiring 2x fewer parameters. Code will be released at https://github.com/Xcco1/SA_DOM
Read more7/4/2024

0
A Semantic Segmentation-guided Approach for Ground-to-Aerial Image Matching
Francesco Pro, Nikolaos Dionelis, Luca Maiano, Bertrand Le Saux, Irene Amerini
Nowadays the accurate geo-localization of ground-view images has an important role across domains as diverse as journalism, forensics analysis, transports, and Earth Observation. This work addresses the problem of matching a query ground-view image with the corresponding satellite image without GPS data. This is done by comparing the features from a ground-view image and a satellite one, innovatively leveraging the corresponding latter's segmentation mask through a three-stream Siamese-like network. The proposed method, Semantic Align Net (SAN), focuses on limited Field-of-View (FoV) and ground panorama images (images with a FoV of 360{deg}). The novelty lies in the fusion of satellite images in combination with their semantic segmentation masks, aimed at ensuring that the model can extract useful features and focus on the significant parts of the images. This work shows how SAN through semantic analysis of images improves the performance on the unlabelled CVUSA dataset for all the tested FoVs.
Read more5/24/2024
0
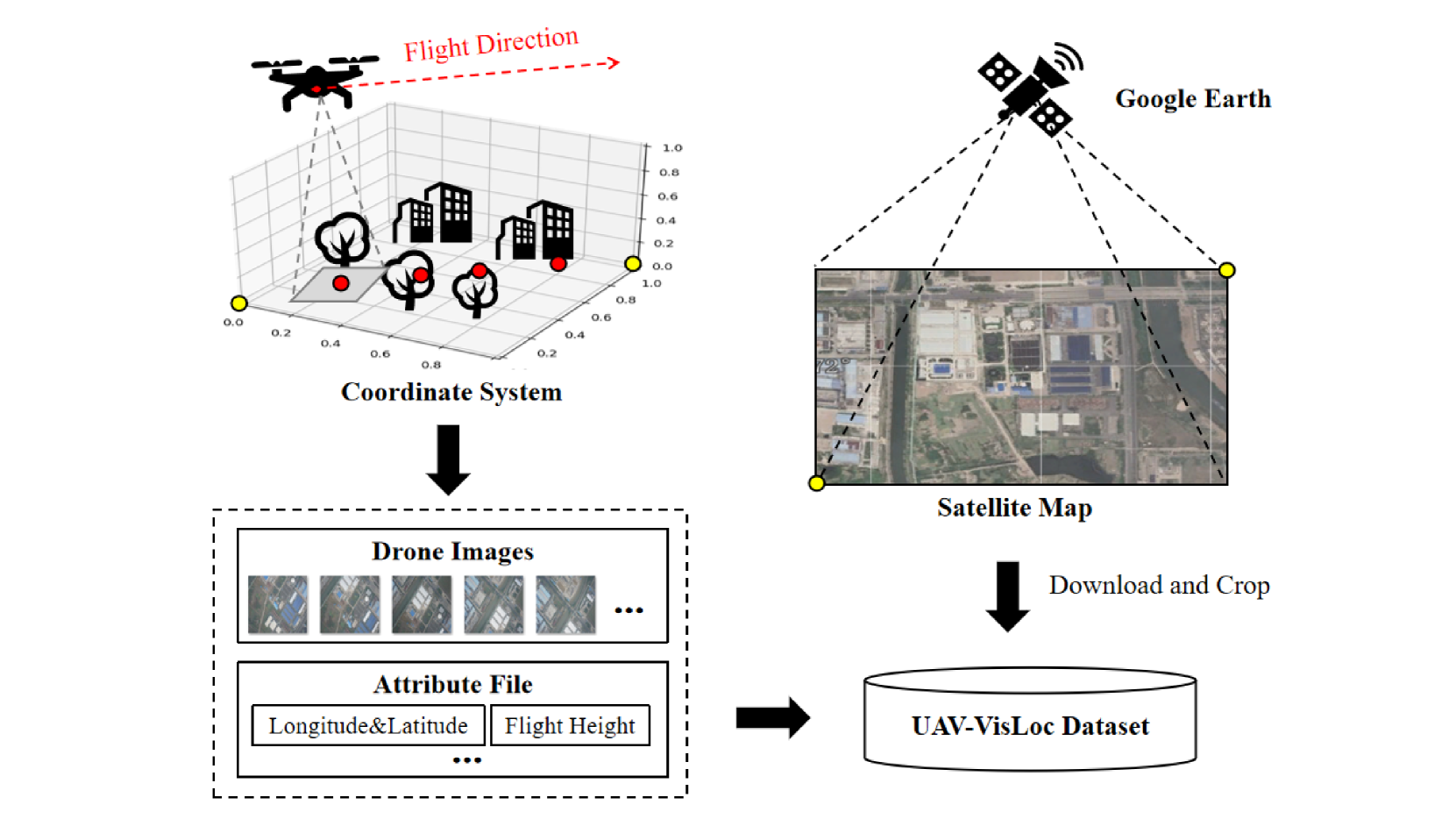
UAV-VisLoc: A Large-scale Dataset for UAV Visual Localization
Wenjia Xu, Yaxuan Yao, Jiaqi Cao, Zhiwei Wei, Chunbo Liu, Jiuniu Wang, Mugen Peng
The application of unmanned aerial vehicles (UAV) has been widely extended recently. It is crucial to ensure accurate latitude and longitude coordinates for UAVs, especially when the global navigation satellite systems (GNSS) are disrupted and unreliable. Existing visual localization methods achieve autonomous visual localization without error accumulation by matching the ground-down view image of UAV with the ortho satellite maps. However, collecting UAV ground-down view images across diverse locations is costly, leading to a scarcity of large-scale datasets for real-world scenarios. Existing datasets for UAV visual localization are often limited to small geographic areas or are focused only on urban regions with distinct textures. To address this, we define the UAV visual localization task by determining the UAV's real position coordinates on a large-scale satellite map based on the captured ground-down view. In this paper, we present a large-scale dataset, UAV-VisLoc, to facilitate the UAV visual localization task. This dataset comprises images from diverse drones across 11 locations in China, capturing a range of topographical features. The dataset features images from fixed-wing drones and multi-terrain drones, captured at different altitudes and orientations. Our dataset includes 6,742 drone images and 11 satellite maps, with metadata such as latitude, longitude, altitude, and capture date. Our dataset is tailored to support both the training and testing of models by providing a diverse and extensive data.
Read more5/21/2024
✨
0
Drone Referring Localization: An Efficient Heterogeneous Spatial Feature Interaction Method For UAV Self-Localization
Ming Dai, Enhui Zheng, Jiahao Chen, Lei Qi, Zhenhua Feng, Wankou Yang
Image retrieval (IR) has emerged as a promising approach for self-localization in unmanned aerial vehicles (UAVs). However, IR-based methods face several challenges: 1) Pre- and post-processing incur significant computational and storage overhead; 2) The lack of interaction between dual-source features impairs precise spatial perception. In this paper, we propose an efficient heterogeneous spatial feature interaction method, termed Drone Referring Localization (DRL), which aims to localize UAV-view images within satellite imagery. Unlike conventional methods that treat different data sources in isolation, followed by cosine similarity computations, DRL facilitates the learnable interaction of heterogeneous features. To implement the proposed DRL, we design two transformer-based frameworks, Post-Fusion and Mix-Fusion, enabling end-to-end training and inference. Furthermore, we introduce random scale cropping and weight balance loss techniques to augment paired data and optimize the balance between positive and negative sample weights. Additionally, we construct a new dataset, UL14, and establish a benchmark tailored to the DRL framework. Compared to traditional IR methods, DRL achieves superior localization accuracy (MA@20 +9.4%) while significantly reducing computational time (1/7) and storage overhead (1/3). The dataset and code will be made publicly available. The dataset and code are available at url{https://github.com/Dmmm1997/DRL} .
Read more8/29/2024