STHN: Deep Homography Estimation for UAV Thermal Geo-localization with Satellite Imagery

0

Sign in to get full access
Overview
- This paper presents a deep learning-based approach for estimating homography transformations between thermal images captured by Unmanned Aerial Vehicles (UAVs) and satellite imagery.
- The goal is to enable accurate geo-localization of thermal targets detected by UAVs using the homography to align the UAV and satellite data.
- The method involves training a neural network to directly estimate the homography parameters from pairs of thermal and satellite images.
- Experiments show the approach achieves state-of-the-art performance on thermal-to-satellite image alignment, enabling robust UAV thermal geo-localization.
Plain English Explanation
Imagine you're a UAV (or drone) equipped with a thermal camera, flying over an area and detecting heat signatures on the ground. To know the exact locations of these heat sources, you need to align the thermal camera's view with a satellite map of the area. This paper introduces a deep learning technique to do that alignment automatically.
The key idea is to train a neural network to estimate the "homography" - a mathematical transformation that maps points in the thermal camera image to their corresponding locations on the satellite map. Once the homography is known, the thermal data can be projected onto the satellite imagery, allowing the exact geo-location of the detected heat sources.
This is a powerful capability, as it enables UAVs equipped with thermal cameras to accurately locate objects of interest, like people or vehicles, without needing additional GPS or other sensors. The deep learning approach is shown to outperform previous methods, making the thermal-to-satellite alignment more robust and reliable.
Technical Explanation
The paper presents a deep homography estimation network that can directly regress the parameters of the homography transformation between a UAV thermal image and a corresponding satellite image. This builds on prior work in UAV visual localization and advances in satellite photogrammetry.
The network architecture consists of an encoder-decoder structure, with the encoder processing the thermal and satellite images separately before combining the features to estimate the homography parameters. This allows the model to learn the complex, non-linear relationship between the thermal and satellite views.
The network is trained on a large dataset of registered thermal-satellite image pairs, using a combination of L1 and geometric reprojection losses to optimize the homography estimation. Experiments demonstrate state-of-the-art performance on thermal-to-satellite image alignment tasks, with the deep homography estimation outperforming previous approaches that relied on hand-crafted features or classical computer vision techniques.
Critical Analysis
The paper makes a compelling case for the effectiveness of the deep homography estimation approach, and the results showcase significant improvements over prior methods. However, a few caveats and limitations are worth considering:
- The training dataset, while large, may not capture the full diversity of thermal and satellite imagery encountered in real-world scenarios. Further research is needed to assess the approach's generalization to a broader range of environments and conditions.
- The homography transformation assumes a planar scene, which may not always hold true, especially in areas with significant terrain variation. Extensions to handle non-planar scenes could further improve the geo-localization accuracy.
- The paper does not provide details on the computational complexity or inference speed of the deep homography estimation network, which could be an important practical consideration for real-time UAV applications.
Overall, the paper presents a promising deep learning-based solution for thermal-to-satellite image alignment, with the potential to significantly enhance the geo-localization capabilities of UAV thermal imaging systems. Further research and evaluation in diverse real-world settings would help solidify the approach's feasibility and practical impact.
Conclusion
This paper introduces a deep learning-based method for estimating homography transformations between UAV thermal images and satellite imagery, enabling accurate geo-localization of thermal targets detected by UAVs. The key innovation is a neural network architecture that can directly regress the homography parameters from the input image pair, outperforming previous approaches that relied on hand-crafted features or classical computer vision techniques.
The demonstrated improvements in thermal-to-satellite image alignment accuracy have important implications for a range of UAV applications, from search and rescue operations to security and surveillance tasks. By seamlessly integrating thermal data with satellite maps, this method can significantly enhance the situational awareness and target identification capabilities of UAV systems.
While the paper presents promising results, further research is needed to assess the approach's generalization to diverse environmental conditions and its practical feasibility for real-time deployment. Nonetheless, this work represents an important step forward in the field of UAV thermal geo-localization, highlighting the potential of deep learning to tackle complex multi-modal alignment challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
STHN: Deep Homography Estimation for UAV Thermal Geo-localization with Satellite Imagery
Jiuhong Xiao, Ning Zhang, Daniel Tortei, Giuseppe Loianno
Accurate geo-localization of Unmanned Aerial Vehicles (UAVs) is crucial for outdoor applications including search and rescue operations, power line inspections, and environmental monitoring. The vulnerability of Global Navigation Satellite Systems (GNSS) signals to interference and spoofing necessitates the development of additional robust localization methods for autonomous navigation. Visual Geo-localization (VG), leveraging onboard cameras and reference satellite maps, offers a promising solution for absolute localization. Specifically, Thermal Geo-localization (TG), which relies on image-based matching between thermal imagery with satellite databases, stands out by utilizing infrared cameras for effective nighttime localization. However, the efficiency and effectiveness of current TG approaches, are hindered by dense sampling on satellite maps and geometric noises in thermal query images. To overcome these challenges, we introduce STHN, a novel UAV thermal geo-localization approach that employs a coarse-to-fine deep homography estimation method. This method attains reliable thermal geo-localization within a 512-meter radius of the UAV's last known location even with a challenging 11% size ratio between thermal and satellite images, despite the presence of indistinct textures and self-similar patterns. We further show how our research significantly enhances UAV thermal geo-localization performance and robustness against geometric noises under low-visibility conditions in the wild. The code is made publicly available.
Read more8/21/2024
0
Leveraging edge detection and neural networks for better UAV localization
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
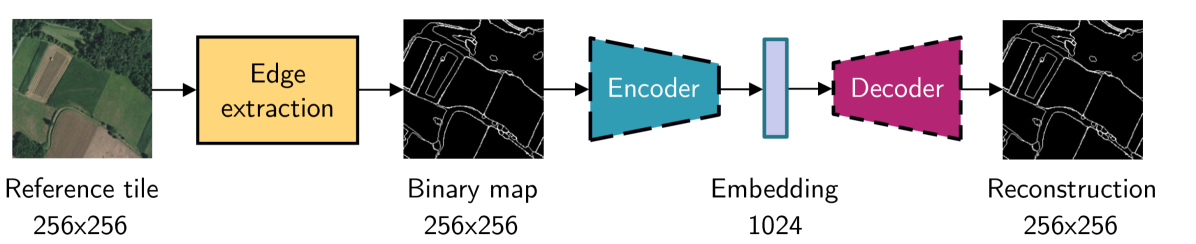
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
Read more6/4/2024

0
Long-Range Vision-Based UAV-assisted Localization for Unmanned Surface Vehicles
Waseem Akram, Siyuan Yang, Hailiang Kuang, Xiaoyu He, Muhayy Ud Din, Yihao Dong, Defu Lin, Lakmal Seneviratne, Shaoming He, Irfan Hussain
The global positioning system (GPS) has become an indispensable navigation method for field operations with unmanned surface vehicles (USVs) in marine environments. However, GPS may not always be available outdoors because it is vulnerable to natural interference and malicious jamming attacks. Thus, an alternative navigation system is required when the use of GPS is restricted or prohibited. To this end, we present a novel method that utilizes an Unmanned Aerial Vehicle (UAV) to assist in localizing USVs in GNSS-restricted marine environments. In our approach, the UAV flies along the shoreline at a consistent altitude, continuously tracking and detecting the USV using a deep learning-based approach on camera images. Subsequently, triangulation techniques are applied to estimate the USV's position relative to the UAV, utilizing geometric information and datalink range from the UAV. We propose adjusting the UAV's camera angle based on the pixel error between the USV and the image center throughout the localization process to enhance accuracy. Additionally, visual measurements are integrated into an Extended Kalman Filter (EKF) for robust state estimation. To validate our proposed method, we utilize a USV equipped with onboard sensors and a UAV equipped with a camera. A heterogeneous robotic interface is established to facilitate communication between the USV and UAV. We demonstrate the efficacy of our approach through a series of experiments conducted during the ``Muhammad Bin Zayed International Robotic Challenge (MBZIRC-2024)'' in real marine environments, incorporating noisy measurements and ocean disturbances. The successful outcomes indicate the potential of our method to complement GPS for USV navigation.
Read more8/22/2024

0
A Semantic Segmentation-guided Approach for Ground-to-Aerial Image Matching
Francesco Pro, Nikolaos Dionelis, Luca Maiano, Bertrand Le Saux, Irene Amerini
Nowadays the accurate geo-localization of ground-view images has an important role across domains as diverse as journalism, forensics analysis, transports, and Earth Observation. This work addresses the problem of matching a query ground-view image with the corresponding satellite image without GPS data. This is done by comparing the features from a ground-view image and a satellite one, innovatively leveraging the corresponding latter's segmentation mask through a three-stream Siamese-like network. The proposed method, Semantic Align Net (SAN), focuses on limited Field-of-View (FoV) and ground panorama images (images with a FoV of 360{deg}). The novelty lies in the fusion of satellite images in combination with their semantic segmentation masks, aimed at ensuring that the model can extract useful features and focus on the significant parts of the images. This work shows how SAN through semantic analysis of images improves the performance on the unlabelled CVUSA dataset for all the tested FoVs.
Read more5/24/2024