A Surveillance Game between a Differential Drive Robot and an Omnidirectional Agent: The Case of a Faster Evader

0
🖼️
Sign in to get full access
Overview
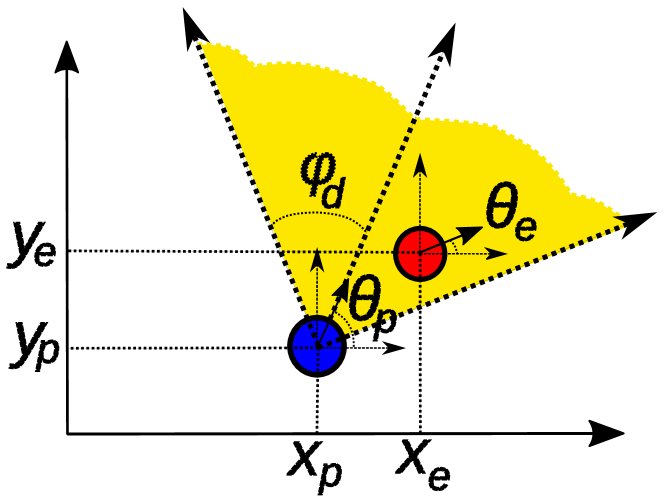
- This paper studies a surveillance problem in mobile robotics where a Differential Drive Robot (DDR) with a bounded range sensor tries to keep an Omnidirectional Agent (OA) within its detection region.
- The DDR wants to maintain the OA inside its detection region for as long as possible, while the OA wants to leave the region as soon as possible.
- The problem is formulated as a zero-sum differential game, and the optimal motion strategies for both players are computed.
- The case where the OA is faster than the DDR is the focus of the study.
Plain English Explanation
The paper explores a scenario where a robot with a limited sensor range (the Differential Drive Robot (DDR)) is trying to keep track of a faster, omni-directional agent (the Omnidirectional Agent (OA)). The goal for the DDR is to maintain the OA within its sensor's detection region for as long as possible, while the OA wants to leave the region as quickly as it can.
To model this situation, the researchers use a mathematical framework called differential game theory. This allows them to determine the best strategies for both the DDR and the OA to achieve their respective objectives.
The paper focuses on the case where the OA is faster than the DDR. In this scenario, it might seem like the OA has a clear advantage and can simply move radially outward from the DDR to escape its sensor range. However, the researchers find that more complex motion strategies can emerge depending on the relative speeds of the two agents.
Specifically, the paper identifies four types of "singular surfaces" that can appear in this game:
Each of these surfaces corresponds to a particular motion strategy that the players should follow to achieve their goals.
Technical Explanation
The paper formulates the surveillance problem as a zero-sum differential game between the DDR and the OA. The DDR is equipped with a bounded range sensor and wants to keep the OA inside its detection region for as long as possible, while the OA wants to leave the region as soon as possible.
The researchers compute the time-optimal motion strategies for both players to achieve their respective goals. They focus on the case where the OA is faster than the DDR, as this poses a greater challenge for the DDR.
The analysis reveals that, although a simple radial outward strategy could be optimal for the OA in some cases, more complex motion strategies can emerge based on the players' speed ratio. Specifically, the researchers identify four types of singular surfaces that can appear in this game:
- Dispersal surfaces: These surfaces define regions where the OA should move radially outward from the DDR's position.
- Transition surfaces: These surfaces indicate a change in the optimal strategy for the OA, who may need to transition between different motion patterns.
- Universal surfaces: These surfaces represent regions where the OA's optimal strategy is independent of the DDR's position and velocity.
- Focal surfaces: These surfaces define regions where the OA should move towards a specific point relative to the DDR's position.
The existence and properties of these singular surfaces determine the optimal motion strategies for both players in this surveillance game.
Critical Analysis
The paper provides a thorough mathematical analysis of the surveillance game between the DDR and the OA, considering the case where the OA has a speed advantage over the DDR. The researchers have done a commendable job in using differential game theory to formulate the problem and derive the optimal motion strategies for both players.
One potential limitation of the study is that it focuses solely on the case where the OA is faster than the DDR. While this is an important scenario to consider, it would be valuable to also explore the reverse case, where the DDR is faster than the OA, as well as the case where both agents have the same speed. Investigating these additional scenarios could provide a more comprehensive understanding of the problem.
Additionally, the paper does not consider the impact of sensor noise, environmental uncertainties, or other practical factors that may affect the implementation of this surveillance system in real-world applications. Addressing these factors could help bridge the gap between the theoretical framework and the practical deployment of such systems.
Further research could also explore the extension of this framework to scenarios with multiple DDRs or multiple OAs, as well as the integration of learning-based approaches to adapt the motion strategies based on observed agent behaviors.
Conclusion
This paper presents a detailed study of a surveillance problem in mobile robotics, where a DDR with a bounded range sensor tries to maintain an OA within its detection region. By formulating the problem as a zero-sum differential game, the researchers have derived the time-optimal motion strategies for both the DDR and the OA.
The key insight from this work is that, despite the OA's speed advantage, more complex motion strategies can emerge based on the players' speed ratio and the resulting singular surfaces in the game. These findings have important implications for the design of robust surveillance systems in mobile robotics, where the relative speeds of the robotic platform and the target agent need to be carefully considered.
While the paper focuses on a specific scenario, the underlying framework and the insights gained from this study could potentially be extended to other pursuit-evasion problems in mobile robotics and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
0
A Surveillance Game between a Differential Drive Robot and an Omnidirectional Agent: The Case of a Faster Evader
Rodrigo Saavedra, Ubaldo Ruiz
A fundamental task in mobile robotics is to keep an agent under surveillance using an autonomous robotic platform equipped with a sensing device. Using differential game theory, we study a particular setup of the previous problem. A Differential Drive Robot (DDR) equipped with a bounded range sensor wants to keep surveillance of an Omnidirectional Agent (OA). The goal of the DDR is to maintain the OA inside its detection region for as much time as possible, while the OA, having the opposite goal, wants to leave the regions as soon as possible. We formulate the problem as a zero-sum differential game, and we compute the time-optimal motion strategies of the players to achieve their goals. We focus on the case where the OA is faster than the DDR. Given the OA's speed advantage, a winning strategy for the OA is always moving radially outwards to the DDR's position. However, this work shows that even though the previous strategy could be optimal in some cases, more complex motion strategies emerge based on the players' speed ratio. In particular, we exhibit that four classes of singular surfaces may appear in this game: Dispersal, Transition, Universal, and Focal surfaces. Each one of those surfaces implies a particular motion strategy for the players.
Read more9/16/2024
0
A Game Between Two Identical Dubins Cars: Evading a Conic Sensor in Minimum Time
Ubaldo Ruiz
A fundamental task in mobile robotics is keeping an intelligent agent under surveillance with an autonomous robot as it travels in the environment. This work studies a version of that problem involving one of the most popular vehicle platforms in robotics. In particular, we consider two identical Dubins cars moving on a plane without obstacles. One of them plays as the pursuer, and it is equipped with a limited field-of-view detection region modeled as a semi-infinite cone with its apex at the pursuer's position. The pursuer aims to maintain the other Dubins car, which plays as the evader, as much time as possible inside its detection region. On the contrary, the evader wants to escape as soon as possible. In this work, employing differential game theory, we find the time-optimal motion strategies near the game's end. The analysis of those trajectories reveals the existence of at least two singular surfaces: a Transition Surface and an Evader's Universal Surface. We also found that the barrier's standard construction produces a surface that partially lies outside the playing space and fails to define a closed region, implying that an additional procedure is required to determine all configurations where the evader escapes.
Read more6/14/2024

0
ODD: Omni Differential Drive for Simultaneous Reconfiguration and Omnidirectional Mobility of Wheeled Robots
Ziqi Zhao, Peijia Xie, Max Q. -H. Meng
Wheeled robots are highly efficient in human living environments. However, conventional wheeled designs, with their limited degrees of freedom and constraints in robot configuration, struggle to simultaneously achieve stability, passability, and agility due to varying footprint needs. This paper proposes a novel robot drive model inspired by human movements, termed as the Omni Differential Drive (ODD). The ODD model innovatively utilizes a lateral differential drive to adjust wheel spacing without adding additional actuators to the existing omnidirectional drive. This approach enables wheeled robots to achieve both simultaneous reconfiguration and omnidirectional mobility. To validate the feasibility of the ODD model, a functional prototype was developed, followed by comprehensive kinematic analyses. Control systems for self-balancing and motion control were designed and implemented. Experimental validations confirmed the feasibility of the ODD mechanism and the effectiveness of the control strategies. The results underline the potential of this innovative drive system to enhance the mobility and adaptability of robotic platforms.
Read more7/16/2024

0
Learning to Play Pursuit-Evasion with Dynamic and Sensor Constraints
Burak M. Gonultas, Volkan Isler
We present a multi-agent reinforcement learning approach to solve a pursuit-evasion game between two players with car-like dynamics and sensing limitations. We develop a curriculum for an existing multi-agent deterministic policy gradient algorithm to simultaneously obtain strategies for both players, and deploy the learned strategies on real robots moving as fast as 2 m/s in indoor environments. Through experiments we show that the learned strategies improve over existing baselines by up to 30% in terms of capture rate for the pursuer. The learned evader model has up to 5% better escape rate over the baselines even against our competitive pursuer model. We also present experiment results which show how the pursuit-evasion game and its results evolve as the player dynamics and sensor constraints are varied. Finally, we deploy learned policies on physical robots for a game between the F1TENTH and JetRacer platforms and show that the learned strategies can be executed on real-robots. Our code and supplementary material including videos from experiments are available at https: //gonultasbu.github.io/pursuit-evasion/.
Read more5/10/2024