A Game Between Two Identical Dubins Cars: Evading a Conic Sensor in Minimum Time

0
Sign in to get full access
Overview
- This paper explores a pursuit-evasion game between two identical Dubins cars, where one car (the evader) tries to evade the sensor of the other car (the pursuer) in minimum time.
- Dubins cars are a simplified model of cars that can only move forward and turn at a limited rate.
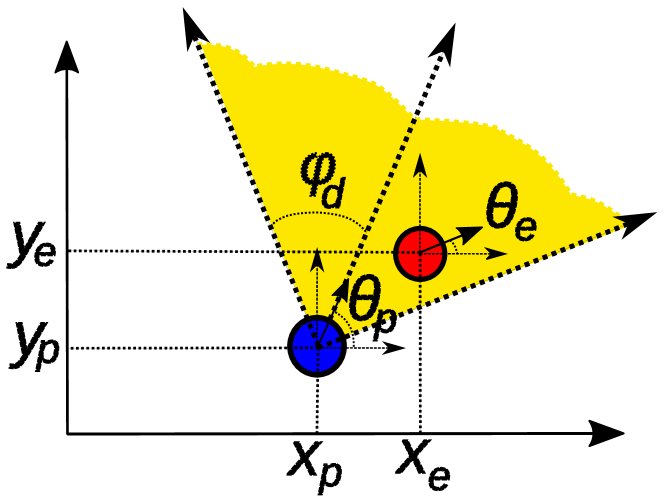
- The sensor is modeled as a conic field of view, and the goal is for the evader to avoid being detected by the pursuer's sensor.
- The authors formulate this as an optimal control problem and derive analytical solutions for the optimal strategies of both the evader and the pursuer.
Plain English Explanation
This paper is about a game between two cars that are trying to outsmart each other. The cars can only move forward and turn at a limited rate, like simple model cars. One car, the "evader," is trying to avoid being detected by the other car, the "pursuer," who has a sensor that can see in a cone-shaped area in front of it.
The researchers have figured out the best way for the evader to escape the pursuer's sensor in the shortest amount of time. They've done this by treating the problem like an "optimal control" problem, where the goal is to find the best possible strategy for each car to achieve their objective. The researchers have been able to come up with exact mathematical solutions for the optimal strategies of both the evader and the pursuer.
Technical Explanation
The paper presents a pursuit-evasion game between two identical Dubins cars, where the evader tries to avoid being detected by the pursuer's conic sensor in minimum time. Dubins cars are a simplified model of cars that can only move forward and turn at a limited rate.
The authors formulate this as an optimal control problem, where the evader's objective is to minimize the time spent in the pursuer's sensor, and the pursuer's objective is to maximize the time the evader spends in the sensor. They derive analytical solutions for the optimal strategies of both the evader and the pursuer, which involve complex calculations and geometric analysis.
The key insights from the technical analysis are:
- The optimal evader strategy involves a combination of moving away from the pursuer and optimally timing the entry and exit from the sensor's field of view.
- The optimal pursuer strategy involves positioning the sensor to maximize the time the evader spends inside it.
- The authors also provide numerical simulations to validate their analytical solutions and demonstrate the effectiveness of the optimal strategies.
Critical Analysis
The paper provides a rigorous and comprehensive analysis of the pursuit-evasion game between two Dubins cars, deriving analytical solutions for the optimal strategies of both the evader and the pursuer. This contributes to the broader field of pursuit-evasion games and optimal control of autonomous vehicles.
However, the authors acknowledge that their model is simplified and does not consider certain real-world factors, such as obstacles or sensor uncertainties. Additionally, the strategies derived in the paper may not be directly applicable to real-time interception scenarios due to the computational complexity involved.
Further research could explore the extension of this work to more realistic scenarios, such as multiple pursuers, dynamic obstacles, or sensor imperfections. Additionally, the application of these techniques to practical problems, such as autonomous vehicle navigation or robot coverage, could provide valuable insights and practical solutions.
Conclusion
This paper presents a comprehensive analysis of a pursuit-evasion game between two Dubins cars, where one car (the evader) tries to avoid being detected by the sensor of the other car (the pursuer) in minimum time. The authors formulate the problem as an optimal control problem and derive analytical solutions for the optimal strategies of both the evader and the pursuer.
The insights from this research contribute to the broader fields of pursuit-evasion games and optimal control of autonomous vehicles. While the simplified model has limitations, the analytical solutions provide a valuable foundation for further research in more realistic scenarios, with the potential to impact applications such as autonomous vehicle navigation and robot coverage.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Game Between Two Identical Dubins Cars: Evading a Conic Sensor in Minimum Time
Ubaldo Ruiz
A fundamental task in mobile robotics is keeping an intelligent agent under surveillance with an autonomous robot as it travels in the environment. This work studies a version of that problem involving one of the most popular vehicle platforms in robotics. In particular, we consider two identical Dubins cars moving on a plane without obstacles. One of them plays as the pursuer, and it is equipped with a limited field-of-view detection region modeled as a semi-infinite cone with its apex at the pursuer's position. The pursuer aims to maintain the other Dubins car, which plays as the evader, as much time as possible inside its detection region. On the contrary, the evader wants to escape as soon as possible. In this work, employing differential game theory, we find the time-optimal motion strategies near the game's end. The analysis of those trajectories reveals the existence of at least two singular surfaces: a Transition Surface and an Evader's Universal Surface. We also found that the barrier's standard construction produces a surface that partially lies outside the playing space and fails to define a closed region, implying that an additional procedure is required to determine all configurations where the evader escapes.
Read more6/14/2024
🖼️
0
A Surveillance Game between a Differential Drive Robot and an Omnidirectional Agent: The Case of a Faster Evader
Rodrigo Saavedra, Ubaldo Ruiz
A fundamental task in mobile robotics is to keep an agent under surveillance using an autonomous robotic platform equipped with a sensing device. Using differential game theory, we study a particular setup of the previous problem. A Differential Drive Robot (DDR) equipped with a bounded range sensor wants to keep surveillance of an Omnidirectional Agent (OA). The goal of the DDR is to maintain the OA inside its detection region for as much time as possible, while the OA, having the opposite goal, wants to leave the regions as soon as possible. We formulate the problem as a zero-sum differential game, and we compute the time-optimal motion strategies of the players to achieve their goals. We focus on the case where the OA is faster than the DDR. Given the OA's speed advantage, a winning strategy for the OA is always moving radially outwards to the DDR's position. However, this work shows that even though the previous strategy could be optimal in some cases, more complex motion strategies emerge based on the players' speed ratio. In particular, we exhibit that four classes of singular surfaces may appear in this game: Dispersal, Transition, Universal, and Focal surfaces. Each one of those surfaces implies a particular motion strategy for the players.
Read more9/16/2024

0
Learning to Play Pursuit-Evasion with Dynamic and Sensor Constraints
Burak M. Gonultas, Volkan Isler
We present a multi-agent reinforcement learning approach to solve a pursuit-evasion game between two players with car-like dynamics and sensing limitations. We develop a curriculum for an existing multi-agent deterministic policy gradient algorithm to simultaneously obtain strategies for both players, and deploy the learned strategies on real robots moving as fast as 2 m/s in indoor environments. Through experiments we show that the learned strategies improve over existing baselines by up to 30% in terms of capture rate for the pursuer. The learned evader model has up to 5% better escape rate over the baselines even against our competitive pursuer model. We also present experiment results which show how the pursuit-evasion game and its results evolve as the player dynamics and sensor constraints are varied. Finally, we deploy learned policies on physical robots for a game between the F1TENTH and JetRacer platforms and show that the learned strategies can be executed on real-robots. Our code and supplementary material including videos from experiments are available at https: //gonultasbu.github.io/pursuit-evasion/.
Read more5/10/2024

0
Efficient optimization-based trajectory planning
Jiayu Fan, Nikolce Murgovski, Jun Liang
This research addresses the increasing demand for advanced navigation systems capable of operating within confined surroundings. A significant challenge in this field is developing an efficient planning framework that can generalize across various types of collision avoidance missions. Utilizing numerical optimal control techniques, this study proposes a unified optimization-based planning framework to meet these demands. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Read more7/9/2024