Survey on Fundamental Deep Learning 3D Reconstruction Techniques

0

Sign in to get full access
Overview
- This paper introduces a novel technique for representing 3D scenes using a refined 3D Gaussian representation, which can enable high-quality dynamic scene reconstruction.
- The proposed approach builds on previous work in neural radiance fields (NeRFs), which have shown impressive results in static 3D scene reconstruction.
- However, the authors identify limitations in existing NeRF methods for capturing dynamic scenes and propose refinements to address these challenges.
Plain English Explanation
The paper describes a new way to capture and represent 3D scenes, particularly those with moving or changing elements. This builds on a technique called neural radiance fields (NeRFs), which have been used to create detailed 3D models from images.
However, NeRFs have struggled to handle scenes with a lot of movement or change over time. This new approach, called a "refined 3D Gaussian representation," aims to improve on NeRFs by better capturing dynamic elements.
Instead of representing the scene as a single static 3D model, the refined approach uses a set of 3D Gaussian distributions to model how different parts of the scene change and move over time. This allows it to more accurately recreate 3D scenes with lots of motion or transformation.
The key innovation is using these adaptable 3D Gaussian distributions, rather than a single fixed 3D model. This gives the system more flexibility to represent complex, dynamic scenes. The paper demonstrates how this can enable high-quality reconstruction of 3D scenes with moving objects, deformations, and other changes over time.
Technical Explanation
The paper builds on the NeRF technique, which uses a neural network to encode the 3D structure and appearance of a scene based on a set of input images. However, NeRFs have limitations in handling dynamic scenes with significant motion or deformation.
To address this, the authors propose a "refined 3D Gaussian representation" that models the 3D scene as a collection of spatially-varying 3D Gaussian distributions, rather than a single static 3D structure. This allows the representation to more flexibly capture changes and motion in the scene over time.
Specifically, the system represents the 3D scene using a set of learned 3D Gaussian distributions, each with its own position, orientation, and scale parameters. As the scene changes, these Gaussian distributions can transform and deform to model the dynamic elements.
The paper describes the neural network architecture and training process used to learn this refined 3D Gaussian representation from a set of input images. Key innovations include:
- Jointly learning the 3D Gaussian parameters and neural radiance fields to model scene appearance
- Incorporating temporal information by conditioning the Gaussian parameters on time
- Leveraging a depth-supervised loss function to better capture 3D structure
Experiments on several dynamic 3D scene datasets demonstrate the ability of this approach to enable high-quality 3D reconstruction of scenes with significant motion and deformation, outperforming standard NeRF baselines.
Critical Analysis
The paper makes a compelling case for the value of the refined 3D Gaussian representation in improving the state-of-the-art for dynamic 3D scene reconstruction. By adapting the NeRF framework to leverage a more flexible scene representation, the authors are able to better capture complex motions and deformations in the 3D environment.
However, the paper also acknowledges several limitations and areas for further research. For example, the current approach is limited to relatively small-scale scenes and may struggle to scale to large, complex environments. Additionally, the training process is computationally intensive, which could hinder real-world deployment.
Further work is also needed to better understand the trade-offs and limitations of the 3D Gaussian representation. While it offers more flexibility than a static NeRF, there may be some types of motion or deformation that are still difficult to capture with this approach.
Additionally, the paper does not deeply explore the potential applications and societal implications of this technology. As 3D scene reconstruction becomes more advanced, it will be important to consider how these techniques could be used, both beneficially and potentially in concerning ways.
Overall, the paper represents an interesting and meaningful advance in the field of 3D reconstruction, with the potential to enable more realistic and dynamic virtual environments. However, continued research and thoughtful consideration of the technology's impact will be crucial as it continues to evolve.
Conclusion
This paper introduces a refined 3D Gaussian representation for high-quality dynamic scene reconstruction, building on the success of neural radiance fields (NeRFs). By modeling the 3D scene as a collection of adaptable Gaussian distributions, the approach can more flexibly capture complex motions and deformations over time, outperforming standard NeRF techniques.
The technical innovations, including joint learning of the Gaussian parameters and neural radiance fields, offer an exciting advance in the field of 3D scene understanding and reconstruction. While the current approach has some limitations, the paper demonstrates the potential for this refined representation to enable more realistic and dynamic virtual environments.
As this technology continues to develop, it will be important to carefully consider the societal implications and potential applications, both beneficial and concerning. Nevertheless, this work represents a meaningful step forward in the quest to create increasingly sophisticated and realistic 3D digital models of the physical world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Survey on Fundamental Deep Learning 3D Reconstruction Techniques
Yonge Bai, LikHang Wong, TszYin Twan
This survey aims to investigate fundamental deep learning (DL) based 3D reconstruction techniques that produce photo-realistic 3D models and scenes, highlighting Neural Radiance Fields (NeRFs), Latent Diffusion Models (LDM), and 3D Gaussian Splatting. We dissect the underlying algorithms, evaluate their strengths and tradeoffs, and project future research trajectories in this rapidly evolving field. We provide a comprehensive overview of the fundamental in DL-driven 3D scene reconstruction, offering insights into their potential applications and limitations.
Read more7/12/2024

0
New!Evaluating Modern Approaches in 3D Scene Reconstruction: NeRF vs Gaussian-Based Methods
Yiming Zhou, Zixuan Zeng, Andi Chen, Xiaofan Zhou, Haowei Ni, Shiyao Zhang, Panfeng Li, Liangxi Liu, Mengyao Zheng, Xupeng Chen
Exploring the capabilities of Neural Radiance Fields (NeRF) and Gaussian-based methods in the context of 3D scene reconstruction, this study contrasts these modern approaches with traditional Simultaneous Localization and Mapping (SLAM) systems. Utilizing datasets such as Replica and ScanNet, we assess performance based on tracking accuracy, mapping fidelity, and view synthesis. Findings reveal that NeRF excels in view synthesis, offering unique capabilities in generating new perspectives from existing data, albeit at slower processing speeds. Conversely, Gaussian-based methods provide rapid processing and significant expressiveness but lack comprehensive scene completion. Enhanced by global optimization and loop closure techniques, newer methods like NICE-SLAM and SplaTAM not only surpass older frameworks such as ORB-SLAM2 in terms of robustness but also demonstrate superior performance in dynamic and complex environments. This comparative analysis bridges theoretical research with practical implications, shedding light on future developments in robust 3D scene reconstruction across various real-world applications.
Read more9/17/2024
0
Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems
Jianheng Liu, Chunran Zheng, Yunfei Wan, Bowen Wang, Yixi Cai, Fu Zhang
This paper presents a unified surface reconstruction and rendering framework for LiDAR-visual systems, integrating Neural Radiance Fields (NeRF) and Neural Distance Fields (NDF) to recover both appearance and structural information from posed images and point clouds. We address the structural visible gap between NeRF and NDF by utilizing a visible-aware occupancy map to classify space into the free, occupied, visible unknown, and background regions. This classification facilitates the recovery of a complete appearance and structure of the scene. We unify the training of the NDF and NeRF using a spatial-varying scale SDF-to-density transformation for levels of detail for both structure and appearance. The proposed method leverages the learned NDF for structure-aware NeRF training by an adaptive sphere tracing sampling strategy for accurate structure rendering. In return, NeRF further refines structural in recovering missing or fuzzy structures in the NDF. Extensive experiments demonstrate the superior quality and versatility of the proposed method across various scenarios. To benefit the community, the codes will be released at url{https://github.com/hku-mars/M2Mapping}.
Read more9/10/2024
0
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
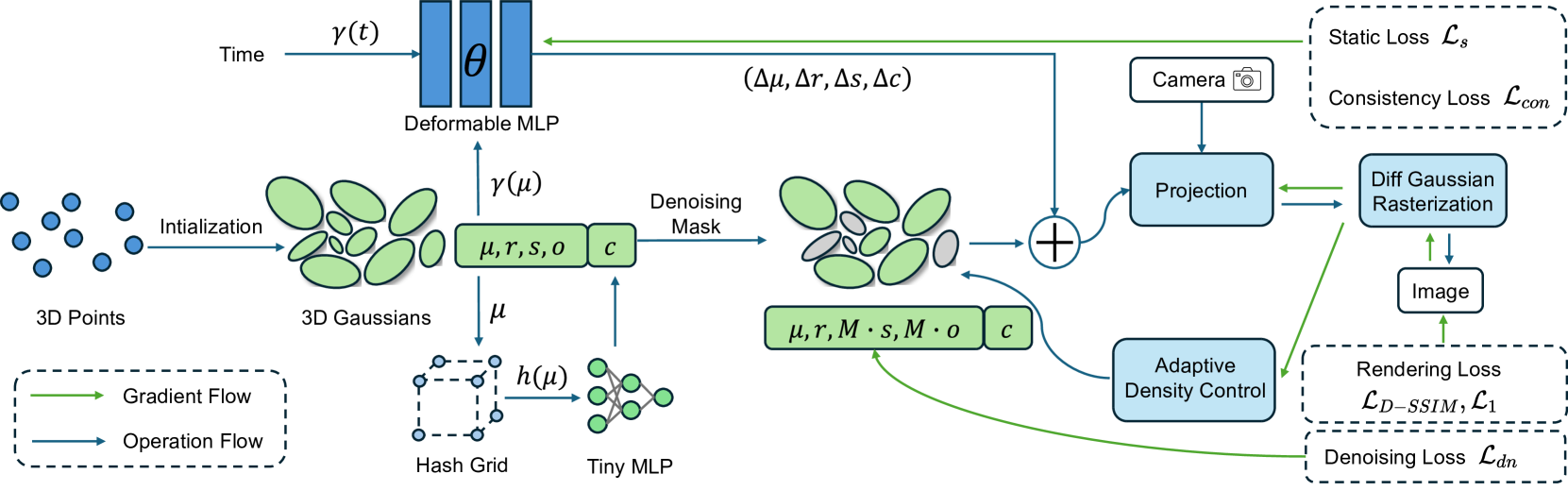
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
Read more5/29/2024