Swarm UAVs Communication
2405.00024
0
0
❗
Abstract
The advancement in cyber-physical systems has opened a new way in disaster management and rescue operations. The usage of UAVs is very promising in this context. UAVs, mainly quadcopters, are small in size and their payload capacity is limited. A single UAV can not traverse the whole area. Hence multiple UAVs or swarms of UAVs come into the picture managing the entire payload in a modular and equiproportional manner. In this work we have explored a vast topic related to UAVs. Among the UAVs quadcopter is the main focus. We explored the types of quadcopters, their flying strategy,their communication protocols, architecture and controlling techniques, followed by the swarm behaviour in nature and UAVs. Swarm behaviour and a few swarm optimization algorithms has been explored here. Swarm architecture and communication in between swarm UAV networks also got a special attention in our work. In disaster management the UAV swarm network must have to search a large area. And for this proper path planning algorithm is required. We have discussed the existing path planning algorithm, their advantages and disadvantages in great detail. Formation maintenance of the swarm network is an important issue which has been explored through leader-follower technique. The wireless path loss model has been modelled using friis and ground ray reflection model. Using this path loss models we have managed to create the link budget and simulate the variation of communication link performance with the variation of distance.
Create account to get full access
Overview
- The paper explores the use of unmanned aerial vehicles (UAVs), particularly quadcopters, in disaster management and rescue operations.
- It examines the capabilities and limitations of single UAVs, and proposes the use of multiple UAVs or swarms of UAVs to efficiently manage and distribute the payload.
- The paper delves into the types of quadcopters, their flying strategies, communication protocols, architecture, control techniques, and swarm behavior.
- It also explores swarm optimization algorithms, swarm architecture, and communication within swarm UAV networks.
- For effective disaster management, the paper discusses the need for proper path planning algorithms and formation maintenance techniques, such as the leader-follower approach.
- The paper also models the wireless path loss using Friis and ground ray reflection models to analyze the communication link performance.
Plain English Explanation
The paper focuses on using groups of small, flying robots called drones or UAVs (Unmanned Aerial Vehicles) to help with disaster management and rescue operations. Drones are useful in these situations because they can cover a large area quickly and carry some equipment. However, a single drone has limited capabilities, so the paper proposes using multiple drones or "swarms" of drones to work together and share the load.
The paper explores the different types of drones, especially a common type called a quadcopter, and how they fly, communicate, and are controlled. It also looks at how drones can work together in a swarm, using special algorithms to coordinate their movements and share information.
For disaster response, the key challenge is that drones need to search a large area quickly. The paper discusses different path planning algorithms that can help the drones find the most efficient routes. It also talks about how to keep the drones in a coordinated formation, with one drone leading the others.
Finally, the paper models how the wireless communication between the drones is affected by distance and obstacles, using mathematical models of radio signal propagation. This helps understand how well the drones can stay connected and share information as they fly around.
Technical Explanation
The paper delves into the use of unmanned aerial vehicles (UAVs), particularly quadcopters, for disaster management and rescue operations. It recognizes the limitations of a single UAV and explores the advantages of using multiple UAVs or swarms of UAVs to efficiently manage and distribute the payload.
The paper examines the various types of quadcopters, their flying strategies, communication protocols, architecture, and control techniques. It also explores the concept of swarm behavior, both in nature and in the context of UAVs, and investigates several swarm optimization algorithms. The paper places a special emphasis on swarm architecture and communication within the swarm UAV network.
For effective disaster management, the paper discusses the need for proper path planning algorithms. It reviews existing path planning algorithms, highlighting their advantages and disadvantages. The paper also explores the leader-follower technique for maintaining the formation of the swarm network.
To understand the communication performance, the paper models the wireless path loss using the Friis and ground ray reflection models. This allows the authors to create a link budget and simulate the variation of communication link performance with distance, which is crucial for ensuring reliable and sustainable multi-UAV performance.
Critical Analysis
The paper presents a comprehensive overview of the potential use of UAV swarms in disaster management and rescue operations. It highlights the advantages of using multiple UAVs to overcome the limitations of a single UAV and effectively manage the required payload.
However, the paper does not delve deeply into the practical implementation challenges and potential issues that may arise in real-world scenarios. For example, it does not address concerns such as the reliability and robustness of the communication protocols, the impact of environmental factors on the UAV's performance, or the potential for interference or hacking of the swarm network.
Additionally, the paper could have explored more advanced swarm algorithms and coordination techniques, beyond the basic leader-follower approach, to enhance the efficiency and adaptability of the UAV swarm in dynamic disaster environments.
Furthermore, the paper could have provided more insight into the specific use cases and potential applications of UAV swarms in disaster management, such as search and rescue operations, damage assessment, or the delivery of emergency supplies. This would have helped readers better understand the real-world relevance and impact of the proposed solutions.
Conclusion
The paper presents a compelling case for the use of UAV swarms in disaster management and rescue operations. By leveraging the capabilities of multiple drones, the proposed approach can overcome the limitations of single UAVs and efficiently manage the required payload and search tasks.
The technical details provided in the paper, such as the exploration of quadcopter types, swarm behavior, path planning algorithms, and communication models, demonstrate the depth of the research and its potential for practical application.
While the paper could have addressed some implementation challenges and explored more advanced swarm coordination techniques, it still offers valuable insights into the promising future of UAV swarms in emergency response scenarios. As the technology continues to evolve, the research presented in this paper can serve as a foundation for further advancements in this critical field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Dynamic Decentralized 3D Urban Coverage and Patrol with UAVs
Wai Lun Leong, Jiawei Cao, Rodney Teo
0
0
In the event of natural or man-made disasters in an urban environment, such as fires, floods, and earthquakes, a swarm of unmanned aerial vehicles (UAVs) can rapidly sweep and provide coverage to monitor the area of interest and locate survivors. We propose a modular framework and patrol strategy that enables a swarm of UAVs to perform cooperative and periodic coverage in such scenarios. Our approach first discretizes the area of interest into viewpoints connected via closed paths. UAVs are assigned to teams via task allocation to cooperatively patrol these closed paths. We propose a minimal, scalable, and robust patrol strategy where UAVs within a team move in a random direction along their assigned closed path and bounce off each other when they meet. Our simulation results show that such a minimal strategy can exhibit an emergent behaviour that provides periodic and complete coverage in a 3D urban environment.
6/17/2024
👀
Towards Secure and Reliable Heterogeneous Real-time Telemetry Communication in Autonomous UAV Swarms
Pavlo Mykytyn, Marcin Brzozowski, Zoya Dyka, Peter Langendorfer
0
0
In the era of cutting-edge autonomous systems, Unmanned Aerial Vehicles (UAVs) are becoming an essential part of the solutions for numerous complex challenges. This paper evaluates UAV peer-to-peer telemetry communication, highlighting its security vulnerabilities and explores a transition to a het-erogeneous multi-hop mesh all-to-all communication architecture to increase inter-swarm connectivity and reliability. Additionally, we suggest a symmetric key agreement and data encryption mechanism implementation for inter - swarm communication, to ensure data integrity and confidentiality without compromising performance.
4/12/2024

Multi-UAV Multi-RIS QoS-Aware Aerial Communication Systems using DRL and PSO
Marwan Dhuheir, Aiman Erbad, Ala Al-Fuqaha, Mohsen Guizani
0
0
Recently, Unmanned Aerial Vehicles (UAVs) have attracted the attention of researchers in academia and industry for providing wireless services to ground users in diverse scenarios like festivals, large sporting events, natural and man-made disasters due to their advantages in terms of versatility and maneuverability. However, the limited resources of UAVs (e.g., energy budget and different service requirements) can pose challenges for adopting UAVs for such applications. Our system model considers a UAV swarm that navigates an area, providing wireless communication to ground users with RIS support to improve the coverage of the UAVs. In this work, we introduce an optimization model with the aim of maximizing the throughput and UAVs coverage through optimal path planning of UAVs and multi-RIS phase configurations. The formulated optimization is challenging to solve using standard linear programming techniques, limiting its applicability in real-time decision-making. Therefore, we introduce a two-step solution using deep reinforcement learning and particle swarm optimization. We conduct extensive simulations and compare our approach to two competitive solutions presented in the recent literature. Our simulation results demonstrate that our adopted approach is 20 % better than the brute-force approach and 30% better than the baseline solution in terms of QoS.
6/26/2024
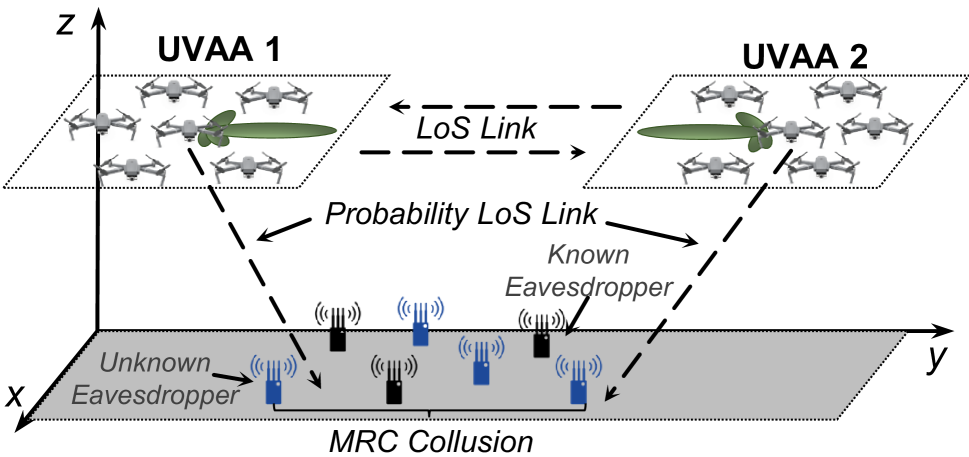
Two-Way Aerial Secure Communications via Distributed Collaborative Beamforming under Eavesdropper Collusion
Jiahui Li, Geng Sun, Qingqing Wu, Shuang Liang, Pengfei Wang, Dusit Niyato
0
0
Unmanned aerial vehicles (UAVs)-enabled aerial communication provides a flexible, reliable, and cost-effective solution for a range of wireless applications. However, due to the high line-of-sight (LoS) probability, aerial communications between UAVs are vulnerable to eavesdropping attacks, particularly when multiple eavesdroppers collude. In this work, we aim to introduce distributed collaborative beamforming (DCB) into UAV swarms and handle the eavesdropper collusion by controlling the corresponding signal distributions. Specifically, we consider a two-way DCB-enabled aerial communication between two UAV swarms and construct these swarms as two UAV virtual antenna arrays. Then, we minimize the two-way known secrecy capacity and the maximum sidelobe level to avoid information leakage from the known and unknown eavesdroppers, respectively. Simultaneously, we also minimize the energy consumption of UAVs for constructing virtual antenna arrays. Due to the conflicting relationships between secure performance and energy efficiency, we consider these objectives as a multi-objective optimization problem. Following this, we propose an enhanced multi-objective swarm intelligence algorithm via the characterized properties of the problem. Simulation results show that our proposed algorithm can obtain a set of informative solutions and outperform other state-of-the-art baseline algorithms. Experimental tests demonstrate that our method can be deployed in limited computing power platforms of UAVs and is beneficial for saving computational resources.
4/12/2024