Tactile-Morph Skills: Energy-Based Control Meets Data-Driven Learning

0
Sign in to get full access
Overview
- This paper proposes a technique called "Tactile-Morph Skills" that combines energy-based control with data-driven learning to enable robots to perform complex physical tasks.
- The key idea is to use a physics-based model to represent the robot's dynamics and then learn a neural network to map sensor inputs to control outputs.
- This allows the robot to learn skills from data while maintaining the stability and reliability of an energy-based control formulation.
Plain English Explanation
The paper describes a new approach for teaching robots how to perform physical tasks, such as delicately manipulating objects or navigating through cluttered environments. The core of the idea is to combine two different techniques - energy-based control and data-driven learning.
Energy-based control uses a physics-based model to represent the robot's dynamics and motion. This makes the robot's behavior more predictable and stable. Data-driven learning, on the other hand, allows the robot to learn skills from examples, similar to how humans and animals learn.
By blending these two approaches, the researchers developed a system called "Tactile-Morph Skills" that can leverage the strengths of both. The robot uses the physics-based model as a foundation, but then a neural network is trained on sensor data to refine the controls and adapt to real-world conditions.
This gives the robot a level of dexterity and adaptability that would be difficult to achieve with either approach alone. For example, the robot could learn how to delicately manipulate fragile objects by observing demonstrations, while still maintaining the stability and reliability needed to avoid damaging the objects.
Technical Explanation
The paper introduces the "Tactile-Morph Skills" framework, which combines energy-based control and data-driven learning to enable robots to perform complex physical tasks.
At the core of the approach is a physics-based model that represents the robot's dynamics. This model is used to define an energy function, which captures the desired behavior of the robot. The energy function is then used to derive control laws that drive the robot towards low-energy states, ensuring stable and predictable motion.
To further refine the robot's behavior and adapt it to real-world conditions, the researchers train a neural network to map sensor inputs (e.g., tactile, vision) to control outputs. This data-driven learning component allows the robot to learn from demonstrations or previous experience, capturing nuances and details that may be difficult to model explicitly.
The key advantage of this approach is that it combines the stability and reliability of the energy-based control formulation with the flexibility and adaptability of the data-driven learning component. The physics-based model provides a strong foundation, while the neural network can adapt and refine the controls based on sensory feedback and real-world interactions.
The paper demonstrates the effectiveness of Tactile-Morph Skills through a series of experiments, including tasks such as delicate object manipulation and navigation in cluttered environments. The results show that the combined approach outperforms both traditional energy-based control and pure data-driven learning methods.
Critical Analysis
The paper presents a promising approach for enabling robots to perform complex physical tasks, but it also acknowledges several limitations and areas for further research.
One potential issue is the reliance on a physics-based model, which may not accurately capture all the nuances of real-world interactions, especially in highly complex or unstructured environments. The authors suggest that the data-driven learning component can help mitigate this, but more research is needed to fully understand the limitations and robustness of the combined approach.
Additionally, the paper focuses on relatively simple tasks, such as object manipulation and navigation. It remains to be seen how well the Tactile-Morph Skills framework would scale to more complex, multi-step tasks or scenarios with higher levels of uncertainty and variability.
Further research could explore ways to make the system more robust and generalizable, such as by incorporating more advanced machine learning techniques or exploring alternative ways to combine the energy-based and data-driven components.
Conclusion
The "Tactile-Morph Skills" framework proposed in this paper represents an interesting and promising approach to enabling robots to perform complex physical tasks. By combining energy-based control and data-driven learning, the system can leverage the stability and reliability of physics-based models while also adapting to real-world conditions through sensory feedback and experience.
The demonstrated results suggest that this combined approach can outperform traditional methods, particularly in tasks requiring dexterity and adaptability. However, the paper also highlights the need for further research to address the limitations and explore the scalability of the Tactile-Morph Skills framework to more complex scenarios.
Overall, this work contributes to the ongoing efforts to develop more capable and versatile robotic systems that can seamlessly interact with the physical world, with potential applications in areas such as manufacturing, assistive robotics, and autonomous navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Tactile-Morph Skills: Energy-Based Control Meets Data-Driven Learning
Anran Zhang, Kubra Karacan, Hamid Sadeghian, Yansong Wu, Fan Wu, Sami Haddadin
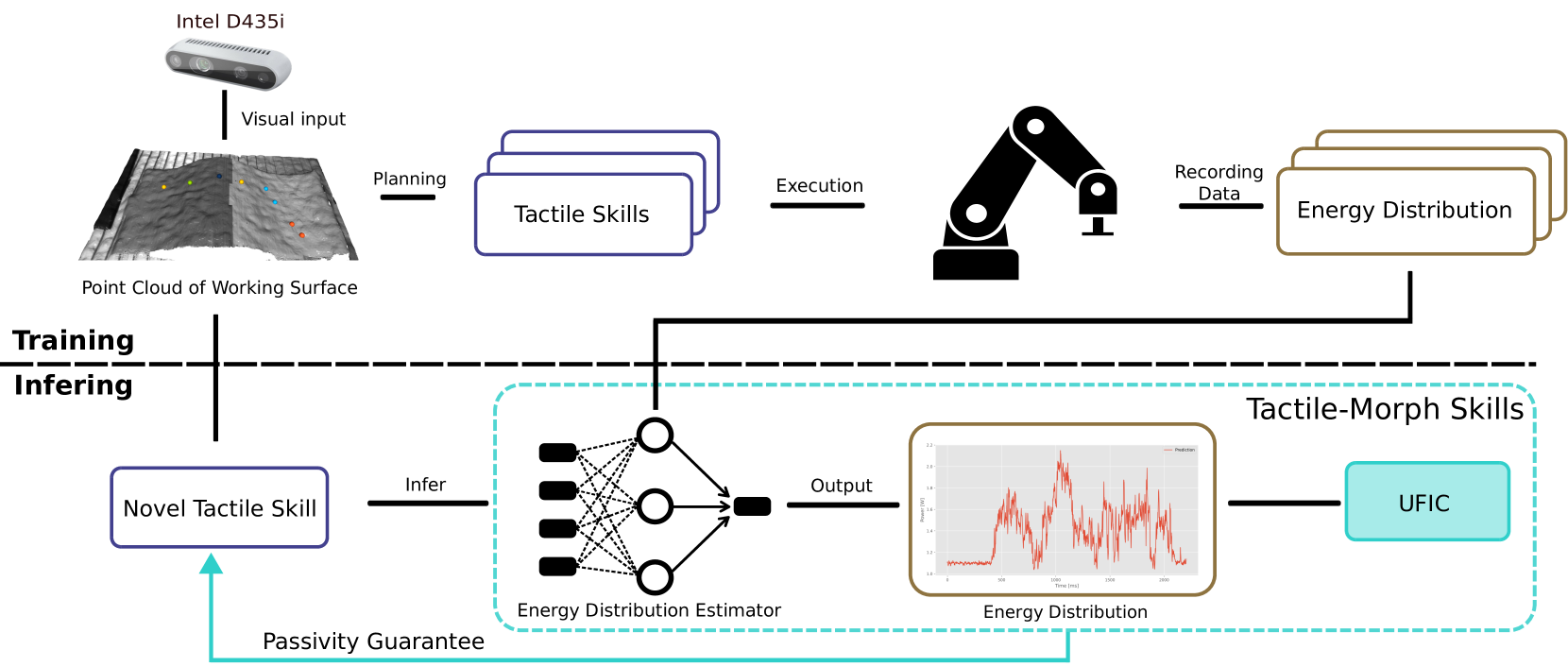
Robotic manipulation is essential for modernizing factories and automating industrial tasks like polishing, which require advanced tactile abilities. These robots must be easily set up, safely work with humans, learn tasks autonomously, and transfer skills to similar tasks. Addressing these needs, we introduce the tactile-morph skill framework, which integrates unified force-impedance control with data-driven learning. Our system adjusts robot movements and force application based on estimated energy levels for the desired trajectory and force profile, ensuring safety by stopping if energy allocated for the control runs out. Using a Temporal Convolutional Network, we estimate the energy distribution for a given motion and force profile, enabling skill transfer across different tasks and surfaces. Our approach maintains stability and performance even on unfamiliar geometries with similar friction characteristics, demonstrating improved accuracy, zero-shot transferable performance, and enhanced safety in real-world scenarios. This framework promises to enhance robotic capabilities in industrial settings, making intelligent robots more accessible and valuable.
Read more8/26/2024
🌿
0
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu, Yunhai Han, Qixian Wang, Vaibhav Saxena, Danfei Xu, Ye Zhao
Tactile sensing is critical to fine-grained, contact-rich manipulation tasks, such as insertion and assembly. Prior research has shown the possibility of learning tactile-guided policy from teleoperated demonstration data. However, to provide the demonstration, human users often rely on visual feedback to control the robot. This creates a gap between the sensing modality used for controlling the robot (visual) and the modality of interest (tactile). To bridge this gap, we introduce MimicTouch, a novel framework for learning policies directly from demonstrations provided by human users with their hands. The key innovations are i) a human tactile data collection system which collects multi-modal tactile dataset for learning human's tactile-guided control strategy, ii) an imitation learning-based framework for learning human's tactile-guided control strategy through such data, and iii) an online residual RL framework to bridge the embodiment gap between the human hand and the robot gripper. Through comprehensive experiments, we highlight the efficacy of utilizing human's tactile-guided control strategy to resolve contact-rich manipulation tasks. The project website is at https://sites.google.com/view/MimicTouch.
Read more9/6/2024
0
Learning Tactile Insertion in the Real World
Daniel Palenicek, Theo Gruner, Tim Schneider, Alina Bohm, Janis Lenz, Inga Pfenning, Eric Kramer, Jan Peters
Humans have exceptional tactile sensing capabilities, which they can leverage to solve challenging, partially observable tasks that cannot be solved from visual observation alone. Research in tactile sensing attempts to unlock this new input modality for robots. Lately, these sensors have become cheaper and, thus, widely available. At the same time, the question of how to integrate them into control loops is still an active area of research, with central challenges being partial observability and the contact-rich nature of manipulation tasks. In this study, we propose to use Reinforcement Learning to learn an end-to-end policy, mapping directly from tactile sensor readings to actions. Specifically, we use Dreamer-v3 on a challenging, partially observable robotic insertion task with a Franka Research 3, both in simulation and on a real system. For the real setup, we built a robotic platform capable of resetting itself fully autonomously, allowing for extensive training runs without human supervision. Our preliminary results indicate that Dreamer is capable of utilizing tactile inputs to solve robotic manipulation tasks in simulation and reality. Furthermore, we find that providing the robot with tactile feedback generally improves task performance, though, in our setup, we do not yet include other sensing modalities. In the future, we plan to utilize our platform to evaluate a wide range of other Reinforcement Learning algorithms on tactile tasks.
Read more8/1/2024
🤿
0
Multimodal and Force-Matched Imitation Learning with a See-Through Visuotactile Sensor
Trevor Ablett, Oliver Limoyo, Adam Sigal, Affan Jilani, Jonathan Kelly, Kaleem Siddiqi, Francois Hogan, Gregory Dudek
Contact-rich tasks continue to present a variety of challenges for robotic manipulation. In this work, we leverage a multimodal visuotactile sensor within the framework of imitation learning (IL) to perform contact rich tasks that involve relative motion (slipping/sliding) between the end-effector and object. We introduce two algorithmic contributions, tactile force matching and learned mode switching, as complimentary methods for improving IL. Tactile force matching enhances kinesthetic teaching by reading approximate forces during the demonstration and generating an adapted robot trajectory that recreates the recorded forces. Learned mode switching uses IL to couple visual and tactile sensor modes with the learned motion policy, simplifying the transition from reaching to contacting. We perform robotic manipulation experiments on four door opening tasks with a variety of observation and method configurations to study the utility of our proposed improvements and multimodal visuotactile sensing. Our results show that the inclusion of force matching raises average policy success rates by 62.5%, visuotactile mode switching by 30.3%, and visuotactile data as a policy input by 42.5%, emphasizing the value of see-through tactile sensing for IL, both for data collection to allow force matching, and for policy execution to allow accurate task feedback.
Read more6/27/2024