TanDepth: Leveraging Global DEMs for Metric Monocular Depth Estimation in UAVs

0
Sign in to get full access
Overview
- Proposes a novel method called "TanDepth" for metric monocular depth estimation in unmanned aerial vehicles (UAVs)
- Leverages global digital elevation models (DEMs) to enhance depth estimation accuracy
- Aims to enable metric scene understanding for various UAV applications
Plain English Explanation
TanDepth: Leveraging Global DEMs for Metric Monocular Depth Estimation in UAVs introduces a new technique called "TanDepth" that helps UAVs (unmanned aerial vehicles) estimate depth more accurately using a single camera.
Depth estimation is important for UAVs to understand their surroundings in 3D, which is crucial for tasks like obstacle avoidance, navigation, and object detection. However, getting accurate depth information from a single camera (monocular) can be challenging.
The key insight of TanDepth is to leverage global digital elevation models (DEMs) - detailed 3D maps of the Earth's surface. By combining the camera images with this contextual DEM information, TanDepth can estimate depth more precisely than previous monocular depth estimation methods.
This allows UAVs to have a better understanding of the 3D structure of the aerial scenes they observe, enabling more robust and capable autonomous systems for various applications.
Technical Explanation
TanDepth: Leveraging Global DEMs for Metric Monocular Depth Estimation in UAVs proposes a novel architecture that integrates global DEM data with monocular depth estimation to improve the accuracy of 3D scene understanding for UAVs.
The core idea is to use the DEM data as an additional input to the depth estimation network, allowing it to leverage the global 3D context of the environment. The network is trained to learn how to fuse the monocular image and DEM data in an optimal way to predict accurate metric depth.
Experiments on various benchmark datasets show that TanDepth outperforms previous state-of-the-art monocular depth estimation methods, particularly in challenging outdoor scenes that UAVs often operate in. The authors demonstrate that the DEM-based approach can significantly reduce depth estimation errors compared to using only monocular cues.
Critical Analysis
The TanDepth paper presents a promising approach to improving monocular depth estimation for UAVs, but there are a few potential limitations and areas for further research:
- Dependence on DEM Data: The method relies on the availability of accurate and up-to-date global DEM data, which may not always be the case, especially in rapidly changing environments.
- Generalization to Other Domains: While the experiments show strong performance on outdoor aerial scenes, further research is needed to assess how well the approach generalizes to other environments, such as indoor spaces or complex urban areas.
- Real-time Performance: The computational complexity of fusing DEM data with the depth estimation network may impact the real-time performance required for many UAV applications, which could be an area for optimization.
Overall, the TanDepth method is a valuable contribution to the field of monocular depth estimation, particularly for enabling more robust and capable autonomous UAV systems. Further research to address the identified limitations could lead to even more practical and widely applicable solutions.
Conclusion
TanDepth: Leveraging Global DEMs for Metric Monocular Depth Estimation in UAVs introduces a novel approach to improve the accuracy of monocular depth estimation for UAVs by incorporating global digital elevation model (DEM) data.
By fusing the DEM information with monocular image cues, the TanDepth method can predict more precise metric depth, enabling better 3D scene understanding for a wide range of UAV applications, such as obstacle avoidance, navigation, and object detection.
The promising results demonstrate the potential of leveraging contextual geographic data to enhance computer vision tasks, particularly in the domain of aerial robotics and autonomous systems. Further research to address the identified limitations could lead to even more practical and widely applicable solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
TanDepth: Leveraging Global DEMs for Metric Monocular Depth Estimation in UAVs
Horatiu Florea, Sergiu Nedevschi
Aerial scene understanding systems face stringent payload restrictions and must often rely on monocular depth estimation for modelling scene geometry, which is an inherently ill-posed problem. Moreover, obtaining accurate ground truth data required by learning-based methods raises significant additional challenges in the aerial domain. Self-supervised approaches can bypass this problem, at the cost of providing only up-to-scale results. Similarly, recent supervised solutions which make good progress towards zero-shot generalization also provide only relative depth values. This work presents TanDepth, a practical, online scale recovery method for obtaining metric depth results from relative estimations at inference-time, irrespective of the type of model generating them. Tailored for Unmanned Aerial Vehicle (UAV) applications, our method leverages sparse measurements from Global Digital Elevation Models (GDEM) by projecting them to the camera view using extrinsic and intrinsic information. An adaptation to the Cloth Simulation Filter is presented, which allows selecting ground points from the estimated depth map to then correlate with the projected reference points. We evaluate and compare our method against alternate scaling methods adapted for UAVs, on a variety of real-world scenes. Considering the limited availability of data for this domain, we construct and release a comprehensive, depth-focused extension to the popular UAVid dataset to further research.
Read more9/10/2024

0
ScaleDepth: Decomposing Metric Depth Estimation into Scale Prediction and Relative Depth Estimation
Ruijie Zhu, Chuxin Wang, Ziyang Song, Li Liu, Tianzhu Zhang, Yongdong Zhang
Estimating depth from a single image is a challenging visual task. Compared to relative depth estimation, metric depth estimation attracts more attention due to its practical physical significance and critical applications in real-life scenarios. However, existing metric depth estimation methods are typically trained on specific datasets with similar scenes, facing challenges in generalizing across scenes with significant scale variations. To address this challenge, we propose a novel monocular depth estimation method called ScaleDepth. Our method decomposes metric depth into scene scale and relative depth, and predicts them through a semantic-aware scale prediction (SASP) module and an adaptive relative depth estimation (ARDE) module, respectively. The proposed ScaleDepth enjoys several merits. First, the SASP module can implicitly combine structural and semantic features of the images to predict precise scene scales. Second, the ARDE module can adaptively estimate the relative depth distribution of each image within a normalized depth space. Third, our method achieves metric depth estimation for both indoor and outdoor scenes in a unified framework, without the need for setting the depth range or fine-tuning model. Extensive experiments demonstrate that our method attains state-of-the-art performance across indoor, outdoor, unconstrained, and unseen scenes. Project page: https://ruijiezhu94.github.io/ScaleDepth
Read more7/12/2024
0
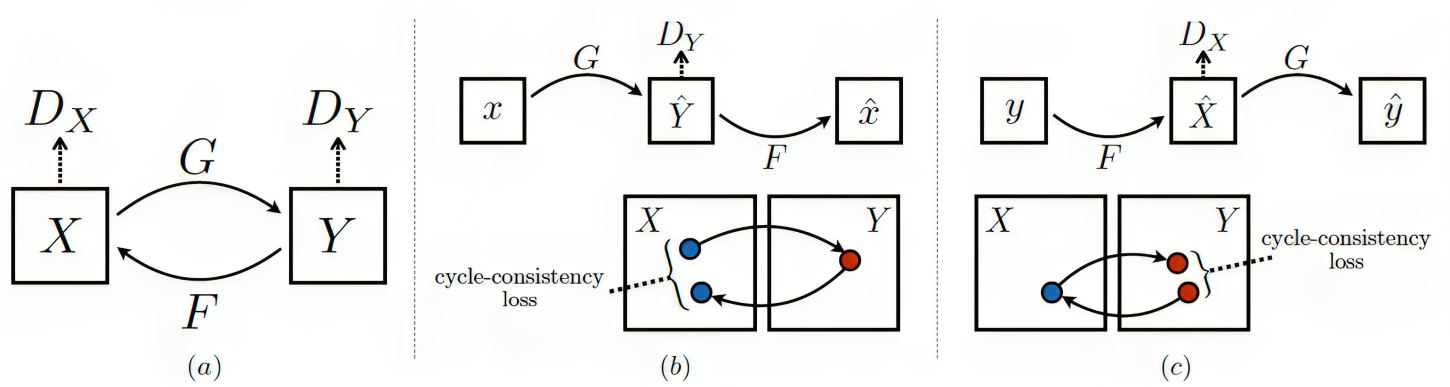
Domain-Transferred Synthetic Data Generation for Improving Monocular Depth Estimation
Seungyeop Lee, Knut Peterson, Solmaz Arezoomandan, Bill Cai, Peihan Li, Lifeng Zhou, David Han
A major obstacle to the development of effective monocular depth estimation algorithms is the difficulty in obtaining high-quality depth data that corresponds to collected RGB images. Collecting this data is time-consuming and costly, and even data collected by modern sensors has limited range or resolution, and is subject to inconsistencies and noise. To combat this, we propose a method of data generation in simulation using 3D synthetic environments and CycleGAN domain transfer. We compare this method of data generation to the popular NYUDepth V2 dataset by training a depth estimation model based on the DenseDepth structure using different training sets of real and simulated data. We evaluate the performance of the models on newly collected images and LiDAR depth data from a Husky robot to verify the generalizability of the approach and show that GAN-transformed data can serve as an effective alternative to real-world data, particularly in depth estimation.
Read more5/3/2024
0
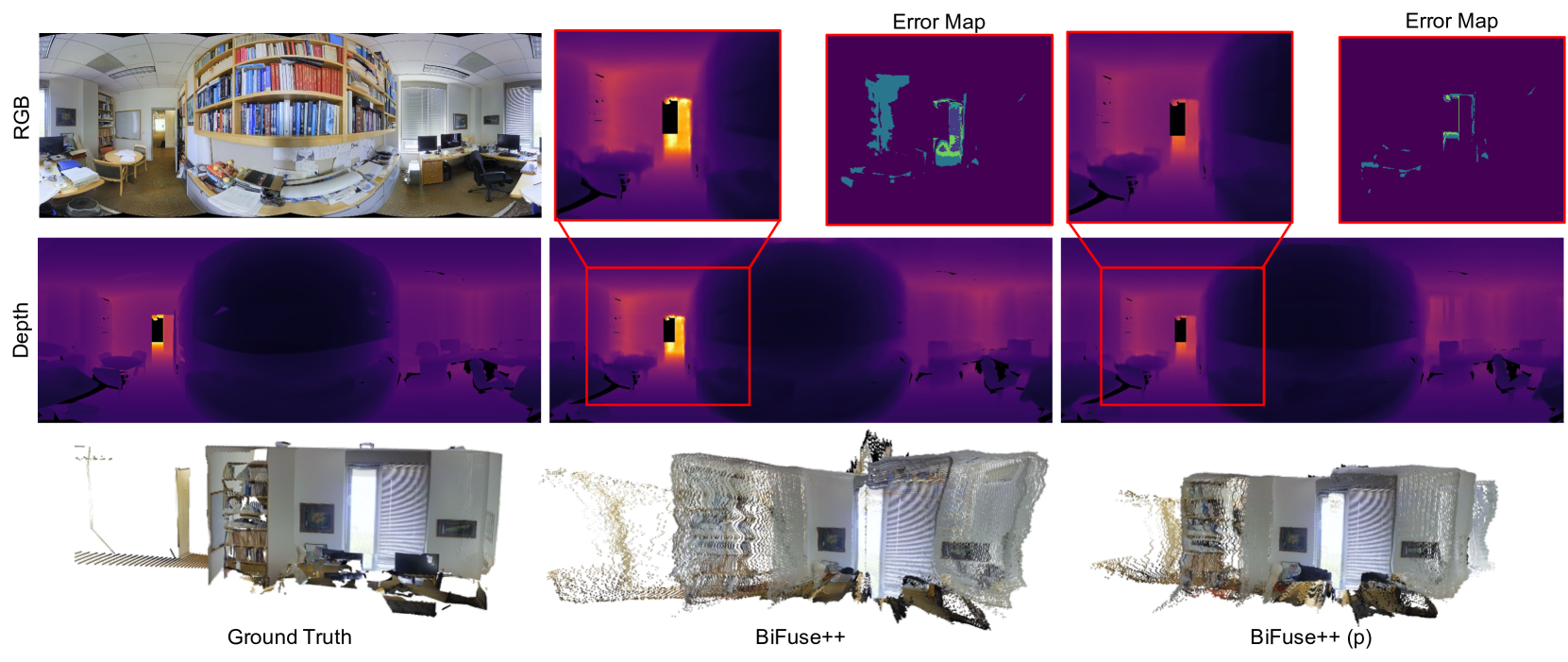
Depth Anywhere: Enhancing 360 Monocular Depth Estimation via Perspective Distillation and Unlabeled Data Augmentation
Ning-Hsu Wang, Yu-Lun Liu
Accurately estimating depth in 360-degree imagery is crucial for virtual reality, autonomous navigation, and immersive media applications. Existing depth estimation methods designed for perspective-view imagery fail when applied to 360-degree images due to different camera projections and distortions, whereas 360-degree methods perform inferior due to the lack of labeled data pairs. We propose a new depth estimation framework that utilizes unlabeled 360-degree data effectively. Our approach uses state-of-the-art perspective depth estimation models as teacher models to generate pseudo labels through a six-face cube projection technique, enabling efficient labeling of depth in 360-degree images. This method leverages the increasing availability of large datasets. Our approach includes two main stages: offline mask generation for invalid regions and an online semi-supervised joint training regime. We tested our approach on benchmark datasets such as Matterport3D and Stanford2D3D, showing significant improvements in depth estimation accuracy, particularly in zero-shot scenarios. Our proposed training pipeline can enhance any 360 monocular depth estimator and demonstrates effective knowledge transfer across different camera projections and data types. See our project page for results: https://albert100121.github.io/Depth-Anywhere/
Read more6/19/2024