Teledrive: An Embodied AI based Telepresence System
2406.00375
0
0
🤖
Abstract
This article presents Teledrive, a telepresence robotic system with embodied AI features that empowers an operator to navigate the telerobot in any unknown remote place with minimal human intervention. We conceive Teledrive in the context of democratizing remote care-giving for elderly citizens as well as for isolated patients, affected by contagious diseases. In particular, this paper focuses on the problem of navigating to a rough target area (like bedroom or kitchen) rather than pre-specified point destinations. This ushers in a unique AreaGoal based navigation feature, which has not been explored in depth in the contemporary solutions. Further, we describe an edge computing-based software system built on a WebRTC-based communication framework to realize the aforementioned scheme through an easy-to-use speech-based human-robot interaction. Moreover, to enhance the ease of operation for the remote caregiver, we incorporate a person following feature, whereby a robot follows a person on the move in its premises as directed by the operator. Moreover, the system presented is loosely coupled with specific robot hardware, unlike the existing solutions. We have evaluated the efficacy of the proposed system through baseline experiments, user study, and real-life deployment.
Create account to get full access
Overview
- This paper explores the use of mobile robotic platforms in a variety of applications, including telepresence and teleoperation.
- It discusses the emergence of low-cost mobile robots and their expanding utility in everyday settings like healthcare, offices, and homes.
- The paper focuses on applications where a remote user interacts with the environment through a mobile robotic platform, enabling new use cases like Teledrive and remote exploration.
Plain English Explanation
Robots are becoming more affordable and versatile, allowing them to be used in a wider range of settings beyond just industrial settings. One emerging use case is the ability for a person to control a robot remotely and interact with the environment where the robot is located. This enables new applications like telepresence, where the remote user can virtually visit a location through the robot, and teleoperation, where the user can control the robot's movements and actions from a distance. These remote interactions open up new possibilities, like allowing a healthcare worker to remotely assess a patient or enabling an engineer to inspect a facility without being physically present.
Technical Explanation
The paper discusses the growing use of low-cost mobile robotic platforms in a variety of real-world settings, including healthcare, retail, and office environments. These mobile robots enable new applications that go beyond traditional in-house operations, allowing remote users to interact with and explore distant environments through the robot.
The paper categorizes these remote applications into two main types: telepresence and teleoperation. In telepresence, the focus is on providing the remote user with a sense of presence and awareness in the remote environment, allowing them to virtually "visit" the location through the robot's sensory inputs and mobility. Teledrive is an example of a telepresence application where the remote user can navigate a mobile robot and experience the environment as if they were physically present.
In contrast, teleoperation emphasizes the remote control and manipulation of the robot, enabling the user to perform tasks and interact with the environment from a distance. AnyTeleop is a system that allows for general-purpose, vision-based teleoperation of robot arms, expanding the range of tasks that can be performed remotely.
The paper also explores the design considerations and challenges associated with these remote applications, such as the comparison between teleoperation and driving a car and the need for efficient exploration and smart scene description to support the remote user's understanding and interaction with the environment.
Critical Analysis
The paper provides a comprehensive overview of the emerging field of remote robot applications, highlighting the potential benefits and challenges. However, it does not delve deeply into the specific technical details or evaluate the performance of the various systems presented.
While the paper discusses the design considerations and challenges, it could have explored these aspects in more depth, particularly the trade-offs between different approaches and the potential limitations of the current solutions. Additionally, the paper could have addressed concerns around the security and privacy implications of remote robot interactions, as well as the ethical considerations surrounding the deployment of these technologies in sensitive environments, such as healthcare.
Further research could also investigate the user experience and acceptance of these remote robot applications, as well as the long-term societal and economic impacts of their widespread adoption.
Conclusion
This paper documents the growing use of mobile robotic platforms in a wide range of real-world applications, enabled by advancements in low-cost technology. The ability to remotely interact with and control these robots opens up new possibilities for telepresence, teleoperation, and exploration, with potential applications in fields like healthcare, industry, and education.
As this technology continues to evolve, it will be essential to address the technical, ethical, and societal challenges associated with the deployment of remote robot applications. Ongoing research and development in this area have the potential to significantly impact how we interact with and leverage robotic systems in our everyday lives.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

TeleAware Robot: Designing Awareness-augmented Telepresence Robot for Remote Collaborative Locomotion
Ruyi Li, Yaxin Zhu, Min Liu, Yihang Zeng, Shanning Zhuang, Jiayi Fu, Yi Lu, Guyue Zhou, Can Liu, Jiangtao Gong
0
0
Telepresence robots can be used to support users to navigate an environment remotely and share the visiting experience with their social partners. Although such systems allow users to see and hear the remote environment and communicate with their partners via live video feed, this does not provide enough awareness of the environment and their remote partner's activities. In this paper, we introduce an awareness framework for collaborative locomotion in scenarios of onsite and remote users visiting a place together. From an observational study of small groups of people visiting exhibitions, we derived four design goals for enhancing the environmental and social awareness between social partners, and developed a set of awareness-enhancing techniques to add to a standard telepresence robot - named TeleAware robot. Through a controlled experiment simulating a guided exhibition visiting task, TeleAware robot showed the ability to lower the workload, facilitate closer social proximity, and improve mutual awareness and social presence compared with the standard one. We discuss the impact of mobility and roles of local and remote users, and provide insights for the future design of awareness-enhancing telepresence robot systems that facilitate collaborative locomotion.
4/9/2024

This really lets us see the entire world: Designing a conversational telepresence robot for homebound older adults
Yaxin Hu, Laura Stegner, Yasmine Kotturi, Caroline Zhang, Yi-Hao Peng, Faria Huq, Yuhang Zhao, Jeffrey P. Bigham, Bilge Mutlu
0
0
In this paper, we explore the design and use of conversational telepresence robots to help homebound older adults interact with the external world. An initial needfinding study (N=8) using video vignettes revealed older adults' experiential needs for robot-mediated remote experiences such as exploration, reminiscence and social participation. We then designed a prototype system to support these goals and conducted a technology probe study (N=11) to garner a deeper understanding of user preferences for remote experiences. The study revealed user interactive patterns in each desired experience, highlighting the need of robot guidance, social engagements with the robot and the remote bystanders. Our work identifies a novel design space where conversational telepresence robots can be used to foster meaningful interactions in the remote physical environment. We offer design insights into the robot's proactive role in providing guidance and using dialogue to create personalized, contextualized and meaningful experiences.
5/27/2024

AnyTeleop: A General Vision-Based Dexterous Robot Arm-Hand Teleoperation System
Yuzhe Qin, Wei Yang, Binghao Huang, Karl Van Wyk, Hao Su, Xiaolong Wang, Yu-Wei Chao, Dieter Fox
0
0
Vision-based teleoperation offers the possibility to endow robots with human-level intelligence to physically interact with the environment, while only requiring low-cost camera sensors. However, current vision-based teleoperation systems are designed and engineered towards a particular robot model and deploy environment, which scales poorly as the pool of the robot models expands and the variety of the operating environment increases. In this paper, we propose AnyTeleop, a unified and general teleoperation system to support multiple different arms, hands, realities, and camera configurations within a single system. Although being designed to provide great flexibility to the choice of simulators and real hardware, our system can still achieve great performance. For real-world experiments, AnyTeleop can outperform a previous system that was designed for a specific robot hardware with a higher success rate, using the same robot. For teleoperation in simulation, AnyTeleop leads to better imitation learning performance, compared with a previous system that is particularly designed for that simulator. Project page: https://yzqin.github.io/anyteleop/.
5/20/2024
Human-centered In-building Embodied Delivery Benchmark
Zhuoqun Xu, Yang Liu, Xiaoqi Li, Jiyao Zhang, Hao Dong
0
0
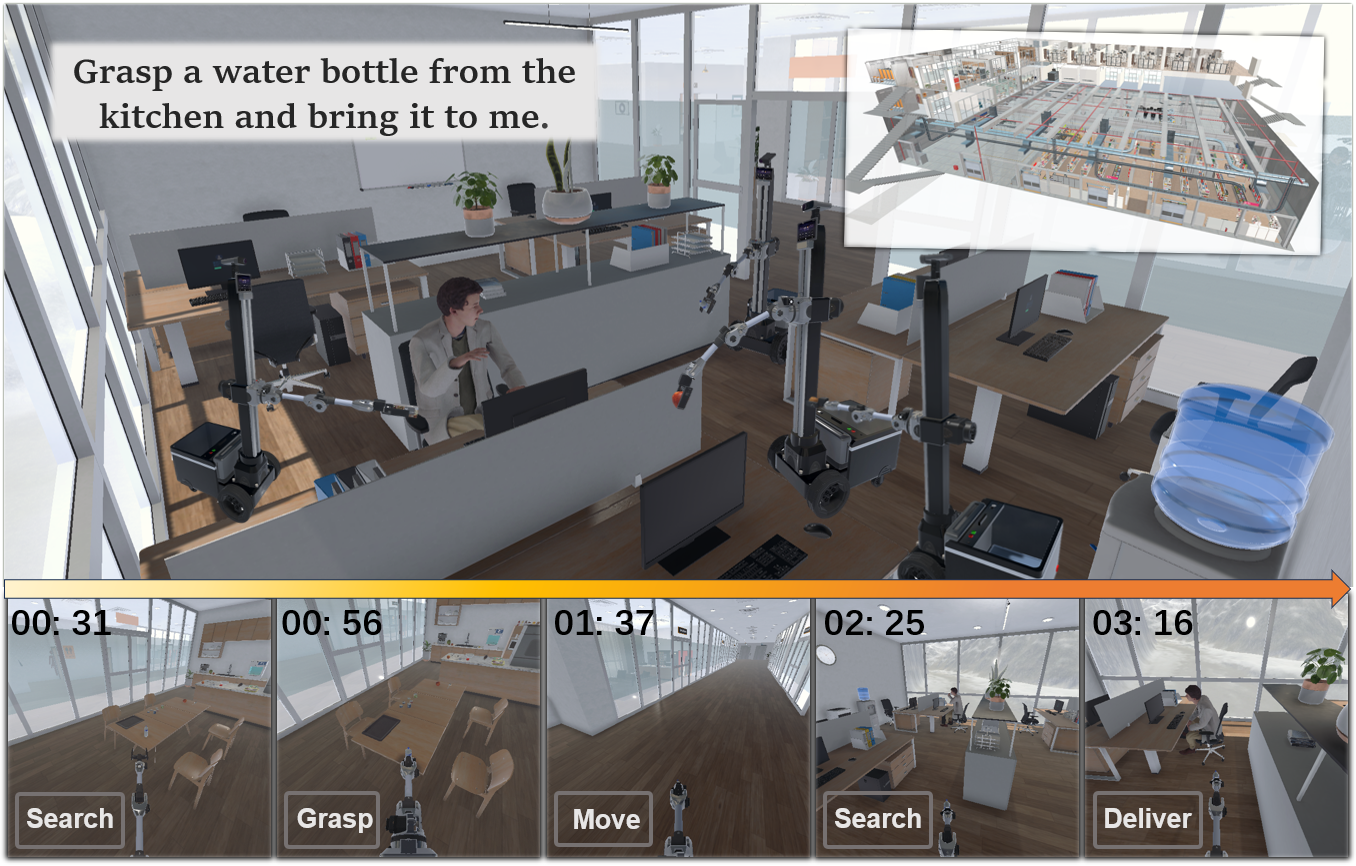
Recently, the concept of embodied intelligence has been widely accepted and popularized, leading people to naturally consider the potential for commercialization in this field. In this work, we propose a specific commercial scenario simulation, human-centered in-building embodied delivery. Furthermore, for this scenario, we have developed a brand-new virtual environment system from scratch, constructing a multi-level connected building space modeled after a polar research station. This environment also includes autonomous human characters and robots with grasping and mobility capabilities, as well as a large number of interactive items. Based on this environment, we have built a delivery dataset containing 13k language instructions to guide robots in providing services. We simulate human behavior through human characters and sample their various needs in daily life. Finally, we proposed a method centered around a large multimodal model to serve as the baseline system for this dataset. Compared to past embodied data work, our work focuses on a virtual environment centered around human-robot interaction for commercial scenarios. We believe this will bring new perspectives and exploration angles to the embodied community.
6/27/2024