Temporal Event Stereo via Joint Learning with Stereoscopic Flow

0

Sign in to get full access
Overview
- This paper presents a novel approach for 3D reconstruction using an event camera, which is a type of sensor that captures visual information as a stream of asynchronous events rather than traditional frames.
- The key innovation is the joint learning of event-based stereo matching and stereoscopic flow estimation, which allows the system to leverage complementary information from both cues to improve the overall 3D reconstruction.
- The authors demonstrate the effectiveness of their approach through experiments on both synthetic and real-world datasets, showing improved performance compared to existing event-based 3D reconstruction methods.
Plain English Explanation
Event cameras are a type of sensor that work differently from traditional cameras. Instead of capturing full frames of an image at a fixed frame rate, event cameras detect and record individual pixel-level changes in brightness over time. This results in a sparse, asynchronous stream of events that encode motion and depth information.
The authors of this paper wanted to use this unique event-based data to reconstruct 3D scenes. They developed a new approach that jointly learns two key computer vision tasks: stereo matching and flow estimation. Stereo matching uses the slight difference in viewpoint between two cameras to infer depth, while flow estimation tracks how pixels move between frames to also provide depth cues.
By training their system to do both of these tasks together, the researchers could leverage the complementary strengths of each to produce more accurate 3D reconstructions from the sparse event data. For example, stereo matching is good at finding depth discontinuities, while flow estimation is better at tracking smooth surfaces.
The team tested their approach on both simulated and real-world event camera datasets, and found that it outperformed previous state-of-the-art methods for 3D reconstruction from event data. This suggests their joint learning strategy is an effective way to extract 3D information from the unique type of visual data provided by event cameras.
Technical Explanation
The key technical contribution of this paper is the
Their proposed architecture takes in event data from a pair of event cameras and produces a dense 3D point cloud as output. The first stage is a shared encoder network that extracts features from the left and right event streams. These features are then fed into two parallel decoder branches - one for stereo matching and one for flow estimation.
The stereo matching branch uses a cost volume formulation to find pixel-wise correspondences between the left and right event streams, which can be triangulated to recover depth. The flow estimation branch, on the other hand, predicts the 2D optical flow between consecutive event frames, which also provides depth cues through the epipolar geometry.
By training these two tasks jointly, with a loss function that encourages consistency between the stereo and flow outputs, the model is able to learn representations that are optimized for both 3D reconstruction objectives. The authors show through extensive experiments on both synthetic and real-world event camera datasets that this joint learning strategy outperforms previous state-of-the-art methods for event-based 3D reconstruction.
Critical Analysis
One limitation of the work, as acknowledged by the authors, is that their current approach assumes a calibrated stereo camera rig. In many real-world applications, this calibration information may not be readily available. An interesting direction for future research would be to explore ways to jointly estimate the camera parameters along with the 3D reconstruction, further reducing the system's dependence on external sensor data.
Additionally, while the authors demonstrate strong results on standard event camera benchmarks, it would be valuable to see how their approach generalizes to more diverse and challenging real-world scenes. The event-based vision literature has shown that performance can sometimes degrade when transitioning from synthetic to natural environments, so further validating the robustness of this method would be an important next step.
Overall, this paper presents an innovative and promising direction for event-based 3D reconstruction, leveraging the complementary strengths of stereo and flow cues. The joint learning strategy is a clever way to extract more complete 3D information from the sparse and asynchronous event data, and the results suggest this is a fruitful avenue for continued research and development.
Conclusion
This paper introduces a novel approach for 3D reconstruction from event camera data, based on the joint learning of event-based stereo matching and stereoscopic flow estimation. By training these two complementary computer vision tasks together, the proposed system is able to produce more accurate 3D point clouds compared to previous state-of-the-art event-based reconstruction methods.
The key insight is that event cameras provide a unique type of visual data, where the sparse and asynchronous nature of the events means that no single cue (like stereo or flow) is sufficient on its own. By learning to leverage both of these depth estimation signals jointly, the model can overcome the limitations of each individual approach.
The promising results on both synthetic and real-world datasets demonstrate the potential of this joint learning strategy for advancing the state-of-the-art in event-based 3D reconstruction. As event cameras become more widely adopted, techniques like this that can make effective use of their distinctive data modality will be increasingly important for a wide range of vision-based applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Temporal Event Stereo via Joint Learning with Stereoscopic Flow
Hoonhee Cho, Jae-Young Kang, Kuk-Jin Yoon
Event cameras are dynamic vision sensors inspired by the biological retina, characterized by their high dynamic range, high temporal resolution, and low power consumption. These features make them capable of perceiving 3D environments even in extreme conditions. Event data is continuous across the time dimension, which allows a detailed description of each pixel's movements. To fully utilize the temporally dense and continuous nature of event cameras, we propose a novel temporal event stereo, a framework that continuously uses information from previous time steps. This is accomplished through the simultaneous training of an event stereo matching network alongside stereoscopic flow, a new concept that captures all pixel movements from stereo cameras. Since obtaining ground truth for optical flow during training is challenging, we propose a method that uses only disparity maps to train the stereoscopic flow. The performance of event-based stereo matching is enhanced by temporally aggregating information using the flows. We have achieved state-of-the-art performance on the MVSEC and the DSEC datasets. The method is computationally efficient, as it stacks previous information in a cascading manner. The code is available at https://github.com/mickeykang16/TemporalEventStereo.
Read more7/16/2024
0
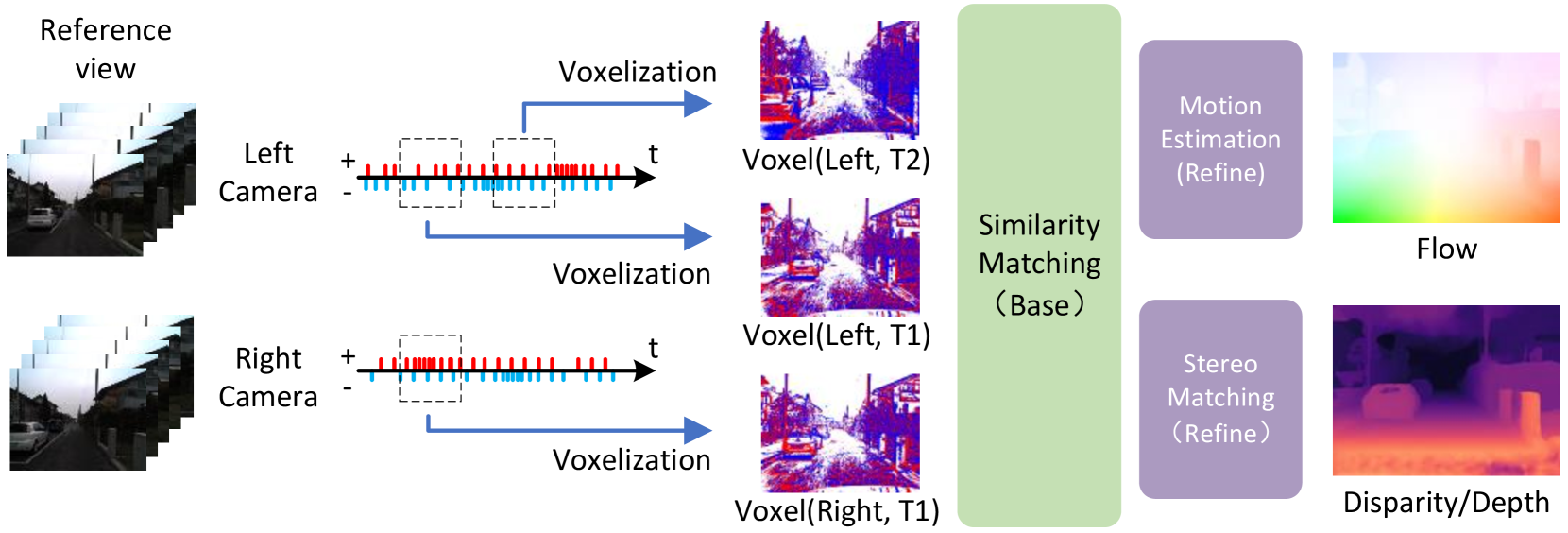
Unifying Event-based Flow, Stereo and Depth Estimation via Feature Similarity Matching
Pengjie Zhang, Lin Zhu, Lizhi Wang, Hua Huang
As an emerging vision sensor, the event camera has gained popularity in various vision tasks such as optical flow estimation, stereo matching, and depth estimation due to its high-speed, sparse, and asynchronous event streams. Unlike traditional approaches that use specialized architectures for each specific task, we propose a unified framework, EventMatch, that reformulates these tasks as an event-based dense correspondence matching problem, allowing them to be solved with a single model by directly comparing feature similarities. By utilizing a shared feature similarities module, which integrates knowledge from other event flows via temporal or spatial interactions, and distinct task heads, our network can concurrently perform optical flow estimation from temporal inputs (e.g., two segments of event streams in the temporal domain) and stereo matching from spatial inputs (e.g., two segments of event streams from different viewpoints in the spatial domain). Moreover, we further demonstrate that our unified model inherently supports cross-task transfer since the architecture and parameters are shared across tasks. Without the need for retraining on each task, our model can effectively handle both optical flow and disparity estimation simultaneously. The experiment conducted on the DSEC benchmark demonstrates that our model exhibits superior performance in both optical flow and disparity estimation tasks, outperforming existing state-of-the-art methods. Our unified approach not only advances event-based models but also opens new possibilities for cross-task transfer and inter-task fusion in both spatial and temporal dimensions. Our code will be available later.
Read more8/1/2024

0
IMU-Aided Event-based Stereo Visual Odometry
Junkai Niu, Sheng Zhong, Yi Zhou
Direct methods for event-based visual odometry solve the mapping and camera pose tracking sub-problems by establishing implicit data association in a way that the generative model of events is exploited. The main bottlenecks faced by state-of-the-art work in this field include the high computational complexity of mapping and the limited accuracy of tracking. In this paper, we improve our previous direct pipeline textit{Event-based Stereo Visual Odometry} in terms of accuracy and efficiency. To speed up the mapping operation, we propose an efficient strategy of edge-pixel sampling according to the local dynamics of events. The mapping performance in terms of completeness and local smoothness is also improved by combining the temporal stereo results and the static stereo results. To circumvent the degeneracy issue of camera pose tracking in recovering the yaw component of general 6-DoF motion, we introduce as a prior the gyroscope measurements via pre-integration. Experiments on publicly available datasets justify our improvement. We release our pipeline as an open-source software for future research in this field.
Read more5/8/2024
🔍
0
An Event-based Algorithm for Simultaneous 6-DOF Camera Pose Tracking and Mapping
Masoud Dayani Najafabadi, Mohammad Reza Ahmadzadeh
Compared to regular cameras, Dynamic Vision Sensors or Event Cameras can output compact visual data based on a change in the intensity in each pixel location asynchronously. In this paper, we study the application of current image-based SLAM techniques to these novel sensors. To this end, the information in adaptively selected event windows is processed to form motion-compensated images. These images are then used to reconstruct the scene and estimate the 6-DOF pose of the camera. We also propose an inertial version of the event-only pipeline to assess its capabilities. We compare the results of different configurations of the proposed algorithm against the ground truth for sequences of two publicly available event datasets. We also compare the results of the proposed event-inertial pipeline with the state-of-the-art and show it can produce comparable or more accurate results provided the map estimate is reliable.
Read more6/27/2024