Text2Grasp: Grasp synthesis by text prompts of object grasping parts

0
🧠
Sign in to get full access
Overview
- The paper proposes a method called Text2Grasp for generating precise grasps of objects based on text descriptions of the target grasp locations.
- Existing methods that use human intentions or task-level language as control signals for grasping often face ambiguity, which this approach aims to address.
- Text2Grasp uses a two-stage process: first generating a coarse grasp pose with a text-guided diffusion model, then optimizing the hand-object contact to ensure plausibility and diversity.
- The method leverages large language models to enable grasp synthesis guided by task-level and personalized text descriptions without additional manual annotations.
Plain English Explanation
The human hand is incredibly capable at grasping and manipulating objects, which is crucial for many everyday tasks. Text2Grasp is a new method that aims to give machines this same level of control over grasping objects, but by using text instructions rather than just human intentions or general task descriptions.
Existing methods that try to use language to control grasping often run into ambiguity problems - the language doesn't provide clear enough guidance on exactly how to grasp the object. To solve this, Text2Grasp first generates a rough grasp pose based on the text description, then refines it through an optimization process to ensure the grasp is both realistic and diverse (i.e., not just one way of grasping the object).
This approach has some key advantages. By using large language models, Text2Grasp can generate grasps based on high-level task descriptions or even personalized preferences, without needing additional manual annotations. The researchers show this method can achieve accurate control over where on the object the grasp occurs, as well as maintain high-quality grasps overall.
Technical Explanation
The core of the Text2Grasp approach is a two-stage grasp synthesis method. First, a text-guided diffusion model called TextGraspDiff generates a coarse grasp pose based on the input text prompt describing the target grasp location on the object.
This coarse pose is then fed into a hand-object contact optimization process. This step ensures the generated grasp is both plausible (physically realistic) and diverse (not just a single way of grasping the object). The optimization considers factors like hand-object interpenetration, joint limits, and grasp stability to refine the pose.
By leveraging large language models, Text2Grasp can generate grasps guided by task-level descriptions (e.g. "grasp the mug by the handle") or personalized preferences without additional manual annotations. This is a key advantage over prior methods that relied more on direct human input or general task-level language.
The researchers evaluate Text2Grasp on a variety of objects and grasp locations, demonstrating accurate part-level grasp control as well as overall grasp quality comparable to other state-of-the-art approaches like SemGrasp and SpringGrasp.
Critical Analysis
The Text2Grasp paper provides a novel and promising approach for enabling text-guided grasp synthesis. However, a few potential limitations or areas for further exploration are worth noting:
The current method is evaluated on relatively simple, isolated object geometries. Extending the approach to handle more complex, cluttered environments as in Multi-Fingered Robotic Hand Grasping in Cluttered Environments would be an important next step.
Additionally, the text-to-grasp mapping is learned in a fairly constrained setting. Exploring more open-ended, freeform text descriptions or even incorporating interactive feedback, as in Physics-Aware Iterative Learning for Prediction Saliency Map, could further enhance the system's real-world applicability.
Finally, while the researchers demonstrate the method's effectiveness, a deeper analysis of failure cases and potential biases in the language model could help identify areas for improvement and ensure the system's robustness.
Conclusion
The Text2Grasp paper presents a novel approach for enabling precise, text-guided control of object grasping. By leveraging large language models, the method can generate high-quality grasps based on task-level descriptions or personalized preferences, addressing the ambiguity issues that have plagued previous language-based grasping systems.
The two-stage process of coarse pose generation followed by hand-object contact optimization ensures the resulting grasps are both plausible and diverse. This combination of text-guided control and grasp quality is a significant advancement in the field of robotic manipulation, with the potential to unlock new applications and enhance human-machine collaboration.
As the researchers continue to refine and expand the capabilities of Text2Grasp, it will be exciting to see how this technology evolves and potentially transforms the way we interact with and control robotic systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
Text2Grasp: Grasp synthesis by text prompts of object grasping parts
Xiaoyun Chang, Yi Sun
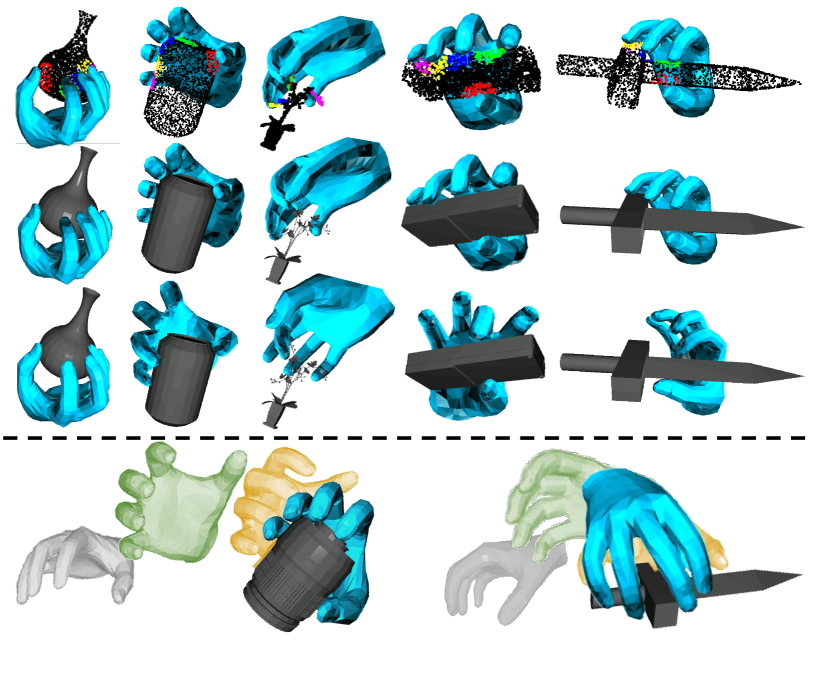
The hand plays a pivotal role in human ability to grasp and manipulate objects and controllable grasp synthesis is the key for successfully performing downstream tasks. Existing methods that use human intention or task-level language as control signals for grasping inherently face ambiguity. To address this challenge, we propose a grasp synthesis method guided by text prompts of object grasping parts, Text2Grasp, which provides more precise control. Specifically, we present a two-stage method that includes a text-guided diffusion model TextGraspDiff to first generate a coarse grasp pose, then apply a hand-object contact optimization process to ensure both plausibility and diversity. Furthermore, by leveraging Large Language Model, our method facilitates grasp synthesis guided by task-level and personalized text descriptions without additional manual annotations. Extensive experiments demonstrate that our method achieves not only accurate part-level grasp control but also comparable performance in grasp quality.
Read more4/24/2024
0
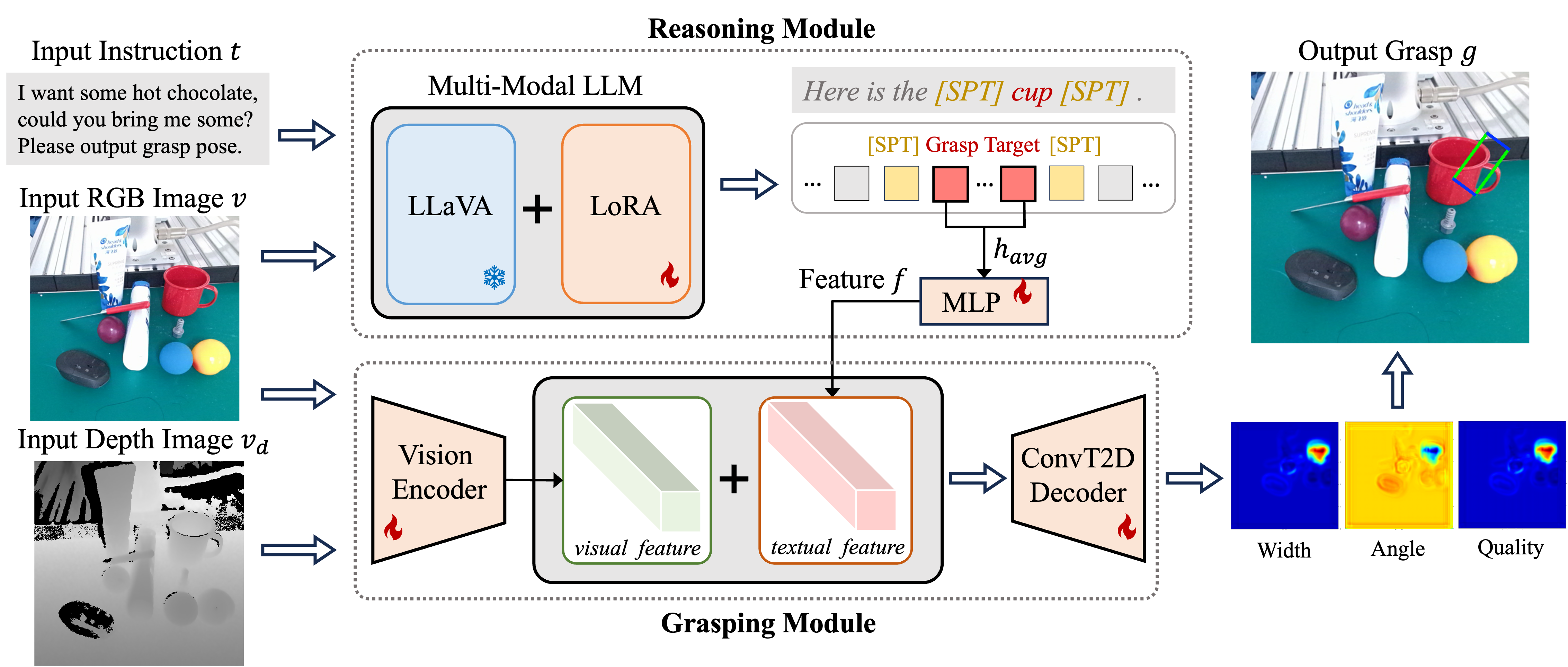
Reasoning Grasping via Multimodal Large Language Model
Shiyu Jin, Jinxuan Xu, Yutian Lei, Liangjun Zhang
Despite significant progress in robotic systems for operation within human-centric environments, existing models still heavily rely on explicit human commands to identify and manipulate specific objects. This limits their effectiveness in environments where understanding and acting on implicit human intentions are crucial. In this study, we introduce a novel task: reasoning grasping, where robots need to generate grasp poses based on indirect verbal instructions or intentions. To accomplish this, we propose an end-to-end reasoning grasping model that integrates a multi-modal Large Language Model (LLM) with a vision-based robotic grasping framework. In addition, we present the first reasoning grasping benchmark dataset generated from the GraspNet-1 billion, incorporating implicit instructions for object-level and part-level grasping, and this dataset will soon be available for public access. Our results show that directly integrating CLIP or LLaVA with the grasp detection model performs poorly on the challenging reasoning grasping tasks, while our proposed model demonstrates significantly enhanced performance both in the reasoning grasping benchmark and real-world experiments.
Read more4/29/2024
0
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024

0
SemGrasp: Semantic Grasp Generation via Language Aligned Discretization
Kailin Li, Jingbo Wang, Lixin Yang, Cewu Lu, Bo Dai
Generating natural human grasps necessitates consideration of not just object geometry but also semantic information. Solely depending on object shape for grasp generation confines the applications of prior methods in downstream tasks. This paper presents a novel semantic-based grasp generation method, termed SemGrasp, which generates a static human grasp pose by incorporating semantic information into the grasp representation. We introduce a discrete representation that aligns the grasp space with semantic space, enabling the generation of grasp postures in accordance with language instructions. A Multimodal Large Language Model (MLLM) is subsequently fine-tuned, integrating object, grasp, and language within a unified semantic space. To facilitate the training of SemGrasp, we have compiled a large-scale, grasp-text-aligned dataset named CapGrasp, featuring about 260k detailed captions and 50k diverse grasps. Experimental findings demonstrate that SemGrasp efficiently generates natural human grasps in alignment with linguistic intentions. Our code, models, and dataset are available publicly at: https://kailinli.github.io/SemGrasp.
Read more4/5/2024