GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance

0
Sign in to get full access
Overview
- This paper presents GrainGrasp, a novel approach for generating dexterous grasps with fine-grained contact guidance.
- GrainGrasp uses a deep neural network to predict the contact points between a robotic hand and an object, enabling more precise and stable grasps.
- The authors evaluate their method on a dataset of objects and demonstrate its superior performance compared to previous state-of-the-art grasp generation techniques.
Plain English Explanation
GrainGrasp is a new way to help robots grasp and pick up objects more effectively. It uses a deep learning model to predict exactly where the robot's fingers should touch the object in order to get a stable and secure grip. This is an improvement over previous methods that didn't provide as much detailed guidance on the specific contact points.
The key idea is that by knowing exactly where the robot's fingers should make contact with the object, it can generate grasps that are more dexterous and precise. This allows the robot to handle a wider variety of objects, including ones that are more complex or delicate in shape.
The researchers tested GrainGrasp on a dataset of different objects and found that it outperformed other state-of-the-art grasp generation techniques. This suggests that the fine-grained contact guidance provided by GrainGrasp is an important advancement in helping robots manipulate objects more skillfully.
Technical Explanation
The paper introduces a new method called GrainGrasp for generating dexterous grasps with fine-grained contact guidance. The key innovation is the use of a deep neural network that can predict the specific contact points between a robotic hand and an object.
The network takes in information about the object's shape and the robot's hand configuration, and outputs a set of predicted contact points. These contact points then guide the grasp generation process, allowing the robot to plan more precise and stable grasps.
The authors evaluate GrainGrasp on a dataset of everyday objects and compare its performance to previous state-of-the-art grasp generation methods, such as SpringGrasp and Text2Grasp. They find that GrainGrasp is able to generate grasps that are more dexterous and better aligned with the object's geometry, leading to improved grasp quality and stability.
The authors also show that GrainGrasp can handle a diverse range of object shapes and sizes, making it a versatile tool for robotic manipulation tasks. The fine-grained contact guidance provided by the neural network is a key enabler of this improved performance.
Critical Analysis
The paper makes a compelling case for the benefits of GrainGrasp's fine-grained contact guidance approach, and the experimental results are promising. However, there are a few potential limitations and areas for further research that could be explored:
-
Object Complexity: While GrainGrasp is shown to work well on a variety of everyday objects, it's unclear how it would perform on more complex or novel objects that deviate significantly from the training data. Evaluating its generalization capabilities would be an important next step.
-
Real-World Deployment: The paper focuses on simulated experiments, and it's not yet clear how GrainGrasp would translate to real-world robotic systems with all the associated challenges of sensing, control, and physical interaction.
-
Computational Efficiency: Training and deploying the deep neural network underlying GrainGrasp may incur significant computational costs, which could limit its practical applicability, especially for resource-constrained robotic platforms. Investigating ways to improve efficiency would be valuable.
-
Interpretability: As with many deep learning approaches, the inner workings of the GrainGrasp network may be opaque, making it difficult to understand why certain contact points are predicted. Developing more interpretable models could enhance trust and understanding of the system's decision-making.
Despite these potential areas for improvement, the GrainGrasp approach represents an exciting advancement in the field of robotic manipulation, and the authors have made a compelling contribution to the state of the art.
Conclusion
The GrainGrasp paper presents a novel method for generating dexterous grasps with fine-grained contact guidance, a key enabler for more versatile and skillful robotic manipulation. By using a deep neural network to predict the specific contact points between a robotic hand and an object, the authors have demonstrated improved grasp quality and stability compared to previous techniques.
While there are some areas for further research and refinement, the core idea of GrainGrasp represents an important step forward in the quest to equip robots with more human-like dexterity and adaptability. As robotic systems continue to play an increasingly prominent role in our lives, advances like this will be crucial for unlocking their full potential in a wide range of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GrainGrasp: Dexterous Grasp Generation with Fine-grained Contact Guidance
Fuqiang Zhao, Dzmitry Tsetserukou, Qian Liu
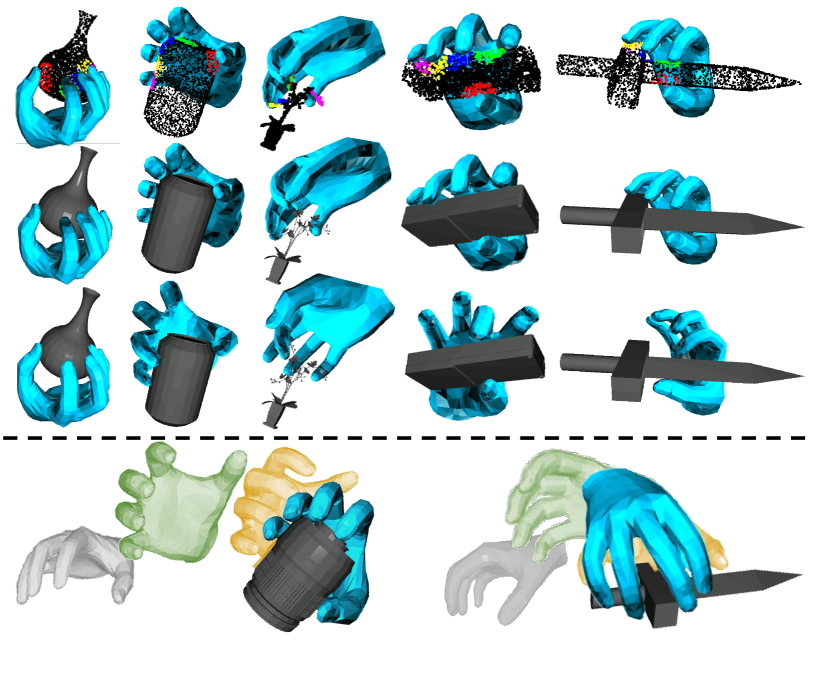
One goal of dexterous robotic grasping is to allow robots to handle objects with the same level of flexibility and adaptability as humans. However, it remains a challenging task to generate an optimal grasping strategy for dexterous hands, especially when it comes to delicate manipulation and accurate adjustment the desired grasping poses for objects of varying shapes and sizes. In this paper, we propose a novel dexterous grasp generation scheme called GrainGrasp that provides fine-grained contact guidance for each fingertip. In particular, we employ a generative model to predict separate contact maps for each fingertip on the object point cloud, effectively capturing the specifics of finger-object interactions. In addition, we develop a new dexterous grasping optimization algorithm that solely relies on the point cloud as input, eliminating the necessity for complete mesh information of the object. By leveraging the contact maps of different fingertips, the proposed optimization algorithm can generate precise and determinable strategies for human-like object grasping. Experimental results confirm the efficiency of the proposed scheme.
Read more5/17/2024
0
UGG: Unified Generative Grasping
Jiaxin Lu, Hao Kang, Haoxiang Li, Bo Liu, Yiding Yang, Qixing Huang, Gang Hua
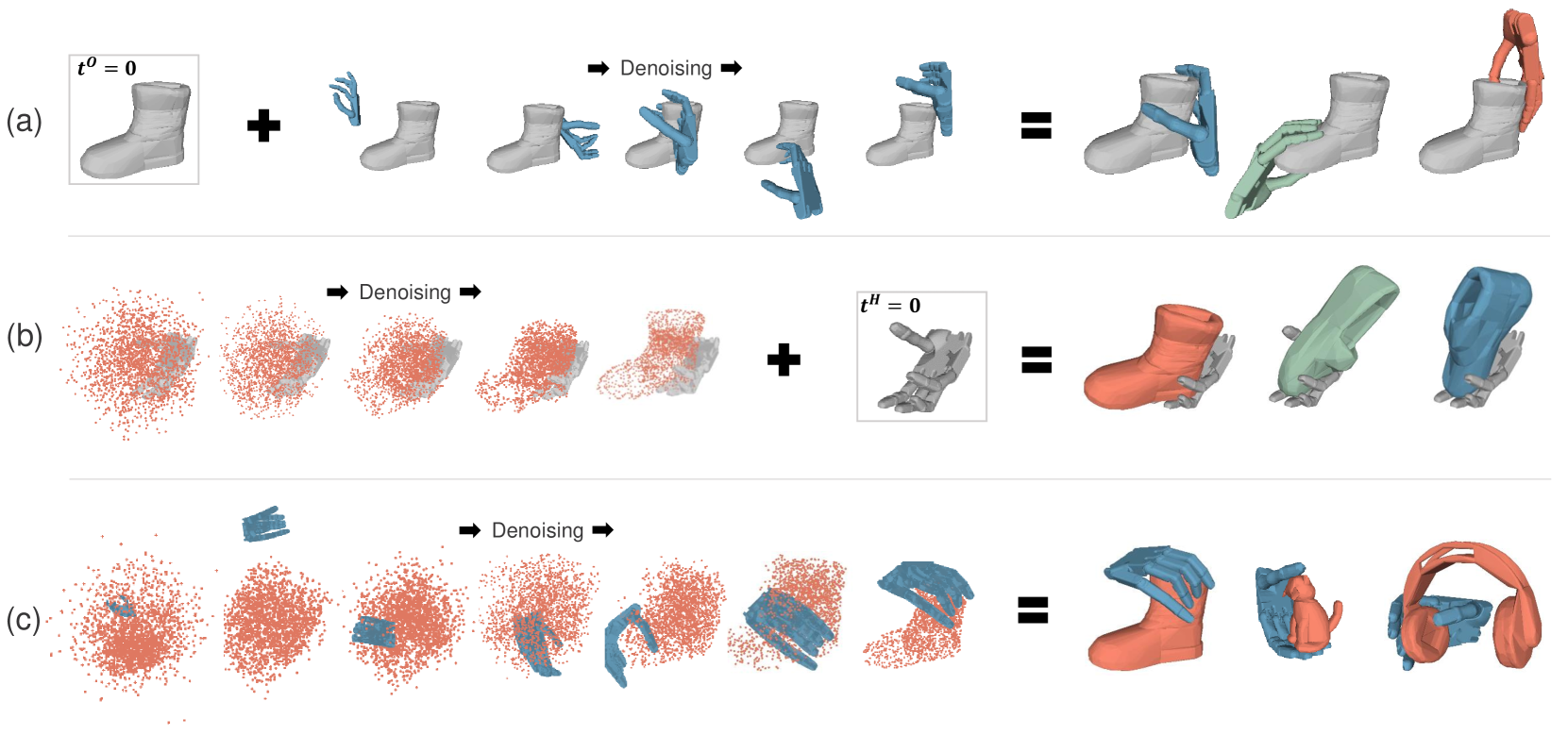
Dexterous grasping aims to produce diverse grasping postures with a high grasping success rate. Regression-based methods that directly predict grasping parameters given the object may achieve a high success rate but often lack diversity. Generation-based methods that generate grasping postures conditioned on the object can often produce diverse grasping, but they are insufficient for high grasping success due to lack of discriminative information. To mitigate, we introduce a unified diffusion-based dexterous grasp generation model, dubbed the name UGG, which operates within the object point cloud and hand parameter spaces. Our all-transformer architecture unifies the information from the object, the hand, and the contacts, introducing a novel representation of contact points for improved contact modeling. The flexibility and quality of our model enable the integration of a lightweight discriminator, benefiting from simulated discriminative data, which pushes for a high success rate while preserving high diversity. Beyond grasp generation, our model can also generate objects based on hand information, offering valuable insights into object design and studying how the generative model perceives objects. Our model achieves state-of-the-art dexterous grasping on the large-scale DexGraspNet dataset while facilitating human-centric object design, marking a significant advancement in dexterous grasping research. Our project page is https://jiaxin-lu.github.io/ugg/.
Read more7/29/2024

0
Multi-fingered Robotic Hand Grasping in Cluttered Environments through Hand-object Contact Semantic Mapping
Lei Zhang, Kaixin Bai, Guowen Huang, Zhaopeng Chen, Jianwei Zhang
The integration of optimization method and generative models has significantly advanced dexterous manipulation techniques for five-fingered hand grasping. Yet, the application of these techniques in cluttered environments is a relatively unexplored area. To address this research gap, we have developed a novel method for generating five-fingered hand grasp samples in cluttered settings. This method emphasizes simulated grasp quality and the nuanced interaction between the hand and surrounding objects. A key aspect of our approach is our data generation method, capable of estimating contact spatial and semantic representations and affordance grasps based on object affordance information. Furthermore, our Contact Semantic Conditional Variational Autoencoder (CoSe-CVAE) network is adept at creating comprehensive contact maps from point clouds, incorporating both spatial and semantic data. We introduce a unique grasp detection technique that efficiently formulates mechanical hand grasp poses from these maps. Additionally, our evaluation model is designed to assess grasp quality and collision probability, significantly improving the practicality of five-fingered hand grasping in complex scenarios. Our data generation method outperforms previous datasets in grasp diversity, scene diversity, modality diversity. Our grasp generation method has demonstrated remarkable success, outperforming established baselines with 81.0% average success rate in real-world single-object grasping and 75.3% success rate in multi-object grasping. The dataset and supplementary materials can be found at https://sites.google.com/view/ffh-clutteredgrasping, and we will release the code upon publication.
Read more4/16/2024

0
SpringGrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis
Sirui Chen, Jeannette Bohg, C. Karen Liu
Generating stable and robust grasps on arbitrary objects is critical for dexterous robotic hands, marking a significant step towards advanced dexterous manipulation. Previous studies have mostly focused on improving differentiable grasping metrics with the assumption of precisely known object geometry. However, shape uncertainty is ubiquitous due to noisy and partial shape observations, which introduce challenges in grasp planning. We propose, SpringGrasp planner, a planner that considers uncertain observations of the object surface for synthesizing compliant dexterous grasps. A compliant dexterous grasp could minimize the effect of unexpected contact with the object, leading to more stable grasp with shape-uncertain objects. We introduce an analytical and differentiable metric, SpringGrasp metric, that evaluates the dynamic behavior of the entire compliant grasping process. Planning with SpringGrasp planner, our method achieves a grasp success rate of 89% from two viewpoints and 84% from a single viewpoints in experiment with a real robot on 14 common objects. Compared with a force-closure based planner, our method achieves at least 18% higher grasp success rate.
Read more4/26/2024