Theoretically Achieving Continuous Representation of Oriented Bounding Boxes

0

Sign in to get full access
Overview
- This paper theoretically explores the continuous representation of oriented bounding boxes, which are important for oriented object detection (OOD) in computer vision tasks.
- The authors propose a framework called LRR that can learn a continuous and differentiable representation of oriented bounding boxes.
- This could enable more accurate and efficient object detection, especially for applications like few-shot personalized object detection and robust object detection under challenging conditions.
Plain English Explanation
The paper focuses on a key challenge in computer vision: how to accurately represent the orientation and shape of objects in an image. Typical bounding boxes used for object detection are aligned with the image grid, but many real-world objects are rotated or irregularly shaped.
The authors propose a new framework called LRR that can learn a continuous and differentiable representation of these "oriented bounding boxes." This means the model can represent the precise orientation and shape of an object, rather than just a rectangular box.
This could lead to significant improvements in object detection tasks, especially for applications where objects have complex shapes or orientations, such as few-shot personalized object detection or robust object detection in challenging conditions. By representing objects more precisely, the models can potentially become more accurate and efficient.
Technical Explanation
The core idea of the paper is to learn a continuous and differentiable representation of oriented bounding boxes, which the authors call the LRR framework. This allows the model to represent the precise orientation and shape of objects, rather than just a rectangular box aligned with the image grid.
The key technical components of the LRR framework include:
- A continuous parameterization of the oriented bounding box, including rotation, scale, and aspect ratio
- A differentiable sampling mechanism to extract features from the object region
- A training procedure that can learn this continuous representation end-to-end
The authors demonstrate the effectiveness of the LRR framework through experiments on various object detection benchmarks, showing improvements over traditional bounding box representations.
Critical Analysis
The paper provides a strong theoretical foundation for continuous oriented bounding box representation, but there are some potential limitations and areas for further research:
- The authors only evaluate the LRR framework on 2D object detection tasks. It would be interesting to see how it performs on 3D object detection for road-side scenes, where orientation and shape are even more critical.
- The training and inference procedures rely on differentiable components, which could make the framework computationally expensive. Further research is needed on efficient implementation and deployment.
- The paper does not deeply explore the potential biases or failure modes of the continuous representation, such as how it might handle occlusion or crowded scenes. Robustness and reliability should be further investigated.
Overall, the LRR framework proposed in this paper represents an interesting and promising direction for improving the representation of complex object shapes and orientations in computer vision. However, additional research is needed to fully understand its capabilities and limitations.
Conclusion
This paper presents a theoretical framework called LRR that can learn a continuous and differentiable representation of oriented bounding boxes. This could lead to significant improvements in object detection tasks, especially for applications with complex object shapes and orientations.
The key innovation is the ability to precisely represent the orientation and shape of objects, rather than just a rectangular box. This could enable more accurate and efficient object detection, personalized object detection, and robust object detection under challenging conditions.
While the paper provides a strong theoretical foundation, further research is needed to fully understand the practical implications and limitations of the LRR framework. Exploring its performance on 3D object detection, efficient implementation, and robustness to challenging scenarios are all important next steps.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Theoretically Achieving Continuous Representation of Oriented Bounding Boxes
Zi-Kai Xiao, Guo-Ye Yang, Xue Yang, Tai-Jiang Mu, Junchi Yan, Shi-min Hu
Considerable efforts have been devoted to Oriented Object Detection (OOD). However, one lasting issue regarding the discontinuity in Oriented Bounding Box (OBB) representation remains unresolved, which is an inherent bottleneck for extant OOD methods. This paper endeavors to completely solve this issue in a theoretically guaranteed manner and puts an end to the ad-hoc efforts in this direction. Prior studies typically can only address one of the two cases of discontinuity: rotation and aspect ratio, and often inadvertently introduce decoding discontinuity, e.g. Decoding Incompleteness (DI) and Decoding Ambiguity (DA) as discussed in literature. Specifically, we propose a novel representation method called Continuous OBB (COBB), which can be readily integrated into existing detectors e.g. Faster-RCNN as a plugin. It can theoretically ensure continuity in bounding box regression which to our best knowledge, has not been achieved in literature for rectangle-based object representation. For fairness and transparency of experiments, we have developed a modularized benchmark based on the open-source deep learning framework Jittor's detection toolbox JDet for OOD evaluation. On the popular DOTA dataset, by integrating Faster-RCNN as the same baseline model, our new method outperforms the peer method Gliding Vertex by 1.13% mAP50 (relative improvement 1.54%), and 2.46% mAP75 (relative improvement 5.91%), without any tricks.
Read more4/17/2024

0
Category-Aware Dynamic Label Assignment with High-Quality Oriented Proposal
Mingkui Feng, Hancheng Yu, Xiaoyu Dang, Ming Zhou
Objects in aerial images are typically embedded in complex backgrounds and exhibit arbitrary orientations. When employing oriented bounding boxes (OBB) to represent arbitrary oriented objects, the periodicity of angles could lead to discontinuities in label regression values at the boundaries, inducing abrupt fluctuations in the loss function. To address this problem, an OBB representation based on the complex plane is introduced in the oriented detection framework, and a trigonometric loss function is proposed. Moreover, leveraging prior knowledge of complex background environments and significant differences in large objects in aerial images, a conformer RPN head is constructed to predict angle information. The proposed loss function and conformer RPN head jointly generate high-quality oriented proposals. A category-aware dynamic label assignment based on predicted category feedback is proposed to address the limitations of solely relying on IoU for proposal label assignment. This method makes negative sample selection more representative, ensuring consistency between classification and regression features. Experiments were conducted on four realistic oriented detection datasets, and the results demonstrate superior performance in oriented object detection with minimal parameter tuning and time costs. Specifically, mean average precision (mAP) scores of 82.02%, 71.99%, 69.87%, and 98.77% were achieved on the DOTA-v1.0, DOTA-v1.5, DIOR-R, and HRSC2016 datasets, respectively.
Read more7/4/2024
0
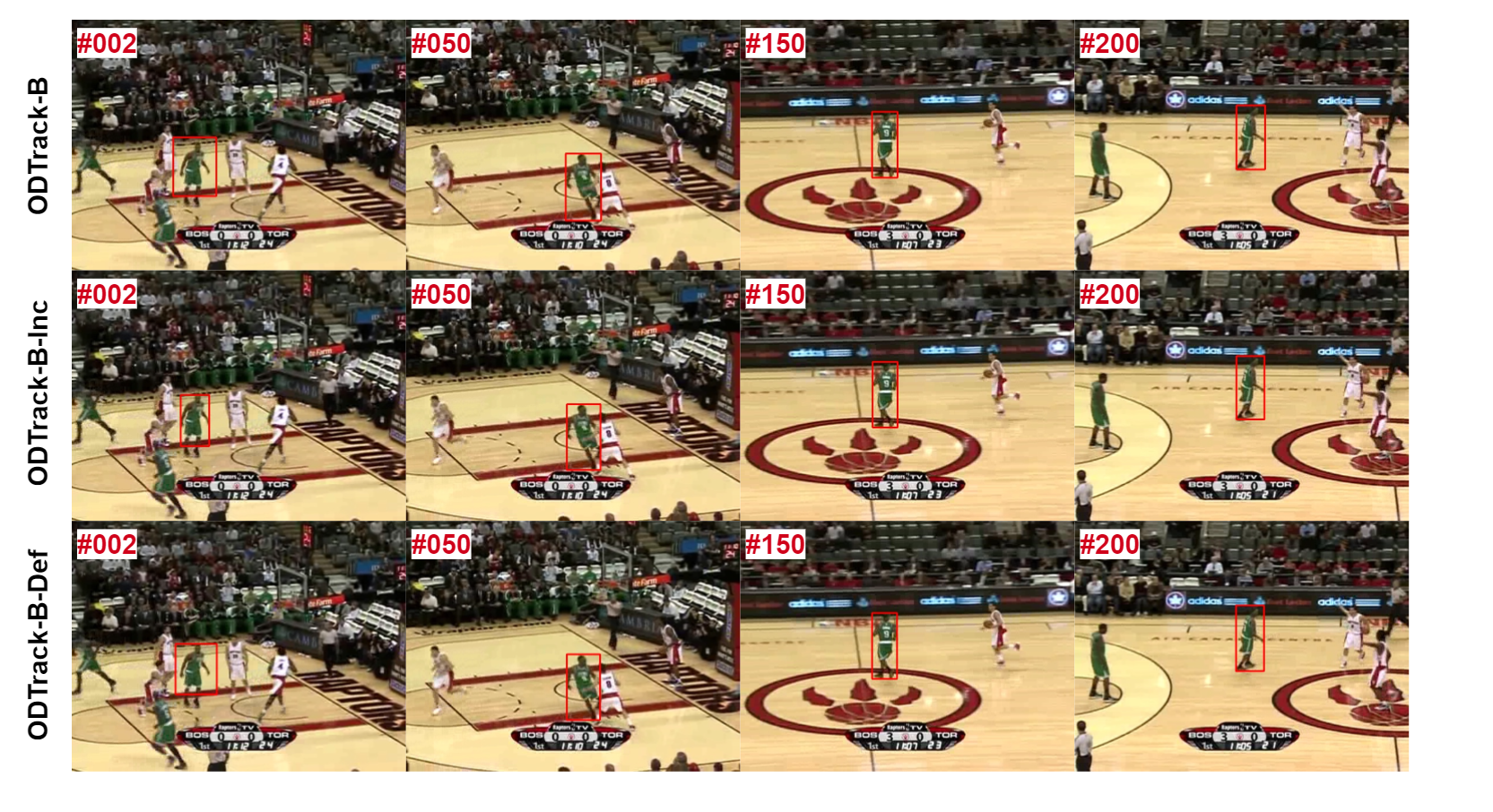
A Novel Bounding Box Regression Method for Single Object Tracking
Omar Abdelaziz, Mohamed Sami Shehata
Locating an object in a sequence of frames, given its appearance in the first frame of the sequence, is a hard problem that involves many stages. Usually, state-of-the-art methods focus on bringing novel ideas in the visual encoding or relational modelling phases. However, in this work, we show that bounding box regression from learned joint search and template features is of high importance as well. While previous methods relied heavily on well-learned features representing interactions between search and template, we hypothesize that the receptive field of the input convolutional bounding box network plays an important role in accurately determining the object location. To this end, we introduce two novel bounding box regression networks: inception and deformable. Experiments and ablation studies show that our inception module installed on the recent ODTrack outperforms the latter on three benchmarks: the GOT-10k, the UAV123 and the OTB2015.
Read more5/20/2024
🔄
0
An Efficient Instance Segmentation Framework Based on Oriented Bounding Boxes
Zhen Zhou, Junfeng Fan, Yunkai Ma, Sihan Zhao, Fengshui Jing, Min Tan
Instance segmentation in unmanned aerial vehicle measurement is a long-standing challenge. Since horizontal bounding boxes introduce many interference objects, oriented bounding boxes (OBBs) are usually used for instance identification. However, based on ``segmentation within bounding box'' paradigm, current instance segmentation methods using OBBs are overly dependent on bounding box detection performance. To tackle this, this paper proposes OBSeg, an efficient instance segmentation framework using OBBs. OBSeg is based on box prompt-based segmentation foundation models (BSMs), e.g., Segment Anything Model. Specifically, OBSeg first detects OBBs to distinguish instances and provide coarse localization information. Then, it predicts OBB prompt-related masks for fine segmentation. Since OBBs only serve as prompts, OBSeg alleviates the over-dependence on bounding box detection performance of current instance segmentation methods using OBBs. In addition, to enable BSMs to handle OBB prompts, we propose a novel OBB prompt encoder. To make OBSeg more lightweight and further improve the performance of lightweight distilled BSMs, a Gaussian smoothing-based knowledge distillation method is introduced. Experiments demonstrate that OBSeg outperforms current instance segmentation methods on multiple public datasets. The code is available at https://github.com/zhen6618/OBBInstanceSegmentation.
Read more9/6/2024