Three-Dimensional Path Planning: Navigating through Rough Mereology
2405.09282
0
0

Abstract
In this paper, we present an innovative technique for the path planning of flying robots in a 3D environment in Rough Mereology terms. The main goal was to construct the algorithm that would generate the mereological potential fields in 3-dimensional space. To avoid falling into the local minimum, we assist with a weighted Euclidean distance. Moreover, a searching path from the start point to the target, with respect to avoiding the obstacles was applied. The environment was created by connecting two cameras working in real-time. To determine the gate and elements of the world inside the map was responsible the Python Library OpenCV [1] which recognized shapes and colors. The main purpose of this paper is to apply the given results to drones.
Create account to get full access
Overview
- This paper explores the use of rough mereology, a mathematical framework for reasoning about part-whole relationships, in the context of three-dimensional path planning for intelligent agents.
- The researchers investigate how rough mereology can be applied to navigate complex environments, particularly those with rough or irregular terrain.
- The paper presents a novel approach that aims to improve the effectiveness and efficiency of path planning algorithms for intelligent agents operating in three-dimensional spaces.
Plain English Explanation
This paper looks at using a specific mathematical technique called "rough mereology" to help intelligent robots and agents plan their movement in 3D environments with rough or uneven terrain. Rough mereology is a way of thinking about how things are made up of parts and how those parts fit together. The researchers think this could be useful for robots and agents trying to navigate through complex 3D spaces, like those with rocks, hills, or other obstacles.
The goal is to develop new path planning algorithms that can help these intelligent systems move more effectively and efficiently through challenging 3D environments. The researchers believe that by incorporating rough mereology into the way the robots and agents understand and reason about their surroundings, they can create path planning approaches that are better suited for navigating rough or irregular terrain.
Technical Explanation
The paper proposes a novel approach to three-dimensional path planning that leverages the principles of rough mereology. Rough mereology is a mathematical framework for reasoning about part-whole relationships in a way that can handle the inherent vagueness and uncertainty present in real-world environments.
The researchers hypothesize that by modeling the 3D environment using rough mereological concepts, intelligent agents can more effectively plan and execute paths through complex, irregular terrains. The proposed approach involves:
- Representing the 3D environment as a rough mereological structure, capturing the relationships between objects and their constituent parts.
- Developing path planning algorithms that leverage this rough mereological representation to identify feasible routes while considering factors such as trafficability, obstacle avoidance, and energy efficiency.
- Implementing and evaluating the rough mereology-based path planning system in simulated and real-world environments to assess its performance compared to traditional planning methods.
Critical Analysis
The paper presents a promising approach to 3D path planning, but there are a few potential limitations and areas for further research:
- The proposed system has only been evaluated in simulation and limited real-world scenarios. More extensive testing in diverse, complex 3D environments would be necessary to fully assess the approach's capabilities and robustness.
- The paper does not provide a detailed analysis of the computational complexity and scalability of the rough mereology-based path planning algorithms. Ensuring efficient performance as the size and complexity of the environment increase is an important consideration.
- While the use of rough mereology is conceptually interesting, the paper could benefit from a more thorough discussion of the specific advantages it offers over alternative 3D path planning techniques, such as those based on occupancy grids or topological maps.
Overall, the research presented in this paper represents an intriguing step towards enhancing the capabilities of intelligent agents in navigating complex 3D environments. Further development and rigorous evaluation of the approach could lead to significant advancements in the field of robotic path planning.
Conclusion
This paper explores the application of rough mereology, a mathematical framework for reasoning about part-whole relationships, to the problem of three-dimensional path planning for intelligent agents. The researchers propose a novel approach that leverages rough mereological concepts to model and navigate through complex, irregular 3D environments more effectively.
The experimental results suggest that incorporating rough mereology into path planning algorithms can offer benefits in terms of trafficability, obstacle avoidance, and energy efficiency. However, the approach requires further evaluation and refinement to address potential limitations, such as scalability and computational complexity.
Overall, the research presented in this paper represents an important step towards enhancing the capabilities of intelligent agents in navigating challenging three-dimensional spaces. Continued advancements in this area could have significant implications for a wide range of applications, from disaster response and search and rescue operations to autonomous exploration and transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams
Sarah Swinton, Jan-Hendrik Ewers, Euan McGookin, David Anderson, Douglas Thomson
0
0
One of the fundamental limiting factors in planetary exploration is the autonomous capabilities of planetary exploration rovers. This study proposes a novel methodology for trustworthy autonomous multi-robot teams which incorporates data from multiple sources (HiRISE orbiter imaging, probability distribution maps, and on-board rover sensors) to find efficient exploration routes in Jezero crater. A map is generated, consisting of a 3D terrain model, traversability analysis, and probability distribution map of points of scientific interest. A three-stage mission planner generates an efficient route, which maximises the accumulated probability of identifying points of interest. A 4D RRT* algorithm is used to determine smooth, flat paths, and prioritised planning is used to coordinate a safe set of paths. The above methodology is shown to coordinate safe and efficient rover paths, which ensure the rovers remain within their nominal pitch and roll limits throughout operation.
5/22/2024
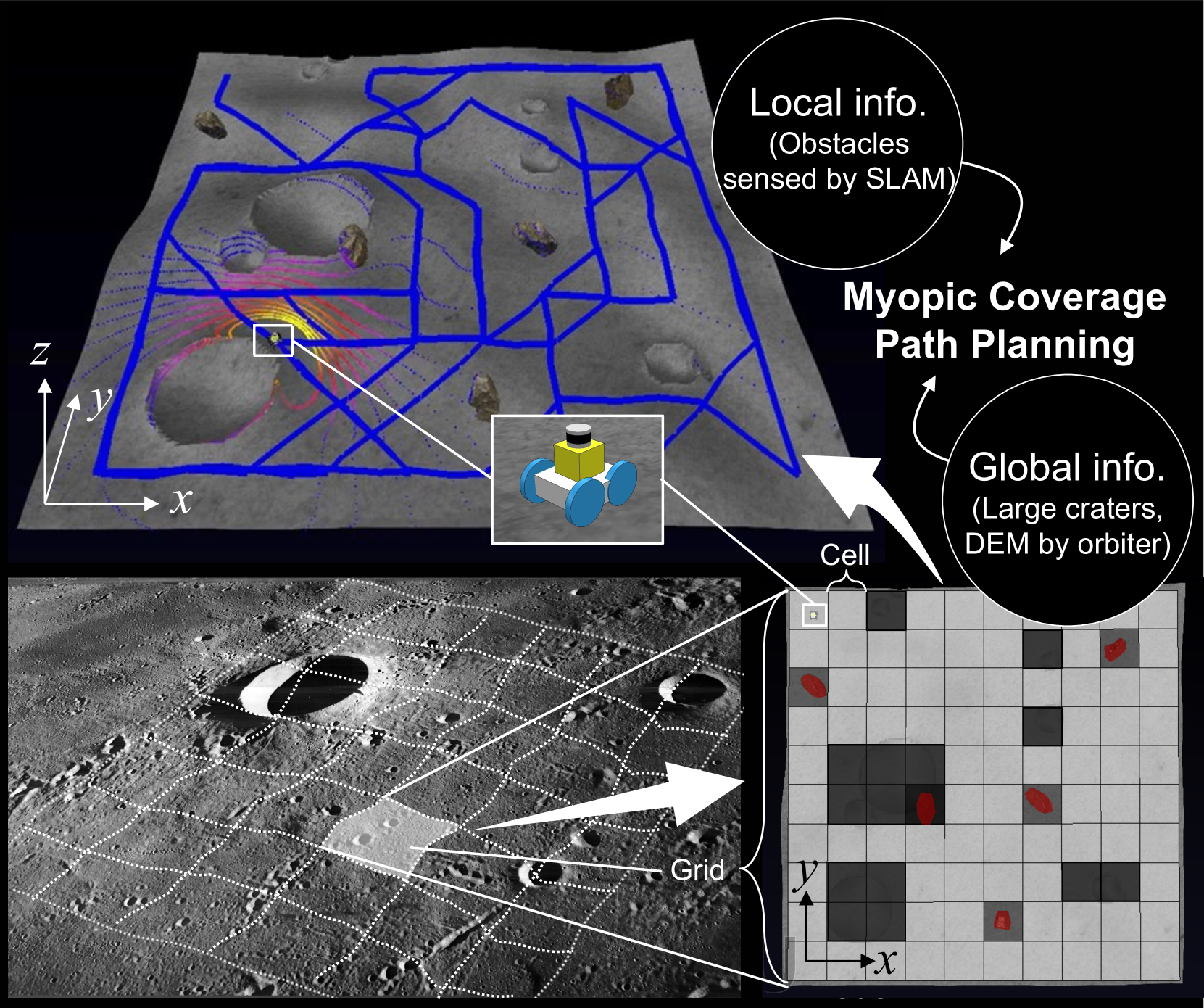
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Shreya Santra, Kentaro Uno, Gen Kudo, Kazuya Yoshida
0
0
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
4/30/2024
↗️
Robotic Path Planning Implementation using Search Algorithms
Vikram Shahapur, Blessing Dixon, Urvishkumar Bharti
0
0
Till now, many path planning algorithms have been proposed in the literature. The objective of these algorithms is to find the quickest path between initial position to the end position in a certain environment. The complexity of these algorithms depends on the internal parameters such as motor speed or sensor range and on other external parameters, including the accuracy of the map, size of the environment, and the number of obstacles. In this paper, we are giving information about how path planning algorithm finds the optimal path in an uneven terrain with a multiple obstacle using TurtleBot3 robot into the Gazebo environment using Dijkstra's and A(star).
5/28/2024
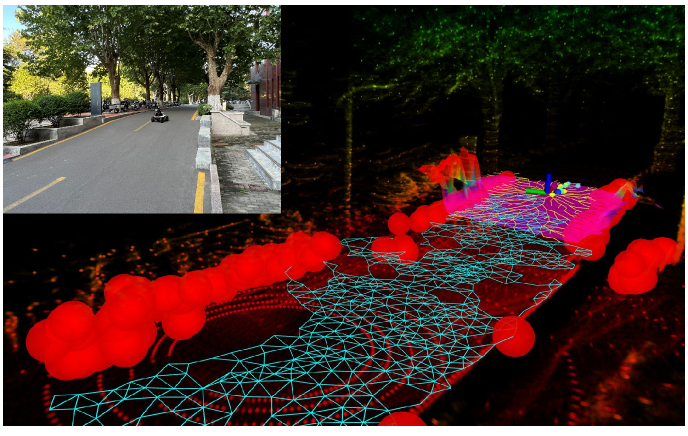
History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
Yinchuan Wang, Nianfei Du, Yongsen Qin, Xiang Zhang, Rui Song, Chaoqun Wang
0
0
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
6/5/2024