History-Aware Planning for Risk-free Autonomous Navigation on Unknown Uneven Terrain
2406.01928
0
0
Abstract
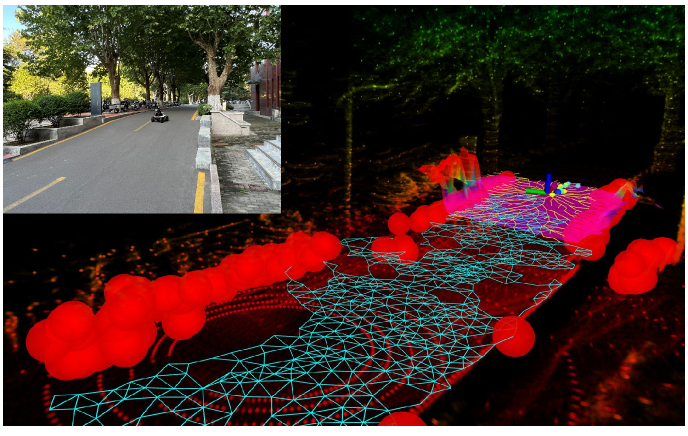
It is challenging for the mobile robot to achieve autonomous and mapless navigation in the unknown environment with uneven terrain. In this study, we present a layered and systematic pipeline. At the local level, we maintain a tree structure that is dynamically extended with the navigation. This structure unifies the planning with the terrain identification. Besides, it contributes to explicitly identifying the hazardous areas on uneven terrain. In particular, certain nodes of the tree are consistently kept to form a sparse graph at the global level, which records the history of the exploration. A series of subgoals that can be obtained in the tree and the graph are utilized for leading the navigation. To determine a subgoal, we develop an evaluation method whose input elements can be efficiently obtained on the layered structure. We conduct both simulation and real-world experiments to evaluate the developed method and its key modules. The experimental results demonstrate the effectiveness and efficiency of our method. The robot can travel through the unknown uneven region safely and reach the target rapidly without a preconstructed map.
Create account to get full access
Overview
- This paper proposes a history-aware planning approach for autonomous navigation on unknown uneven terrain.
- The goal is to enable risk-free navigation by anticipating and avoiding potential hazards based on the robot's past experiences.
- The approach combines a terrain mapping module, a history-aware planning module, and a control module to plan and execute safe trajectories.
Plain English Explanation
The research paper describes a system for autonomous robots to navigate safely over rough, uneven terrain that they have not encountered before. The key idea is to have the robot "remember" its past experiences and use that information to plan a path that avoids potential hazards or dangerous areas.
The system works by first building a map of the terrain using sensors on the robot. It then uses this map, along with information about the robot's previous movements and any obstacles it has encountered, to plan a route that minimizes the risk of the robot getting stuck, tipping over, or running into something dangerous. [This relates to the research presented in <a href="https://aimodels.fyi/papers/arxiv/bipedal-safe-navigation-over-uncertain-rough-terrain">Bipedal Safe Navigation Over Uncertain Rough Terrain</a> and <a href="https://aimodels.fyi/papers/arxiv/under-canopy-navigation-using-aerial-lidar-maps">Under-Canopy Navigation Using Aerial LiDAR Maps</a>.]
By taking the robot's history into account, the system can anticipate and avoid problems that the robot might run into, making the navigation process much safer and more reliable. This could be especially useful for robots exploring unknown or hazardous environments, like the surface of another planet. [This relates to the research presented in <a href="https://aimodels.fyi/papers/arxiv/novel-methodology-autonomous-planetary-exploration-using-multi">A Novel Methodology for Autonomous Planetary Exploration Using Multi-Modal Perception</a>.]
Technical Explanation
The proposed system consists of three main components: a terrain mapping module, a history-aware planning module, and a control module.
The terrain mapping module uses sensors on the robot, such as LiDAR or cameras, to build a detailed map of the surrounding environment. This map includes information about the terrain's elevation, slope, and other features that could impact the robot's navigation.
The history-aware planning module takes this terrain map, along with data about the robot's previous movements and any obstacles it has encountered, to plan an optimal path through the environment. It uses this historical information to anticipate and avoid potential hazards, such as steep slopes or unstable surfaces, that the robot may have struggled with in the past. [This relates to the research presented in <a href="https://aimodels.fyi/papers/arxiv/model-predictive-control-aggressive-driving-over-uneven">Model Predictive Control for Aggressive Driving Over Uneven Terrain</a>.]
Finally, the control module translates the planned path into the necessary motor commands to execute the navigation, ensuring the robot follows the planned trajectory safely and efficiently.
Critical Analysis
The paper presents a promising approach for enabling autonomous navigation on unknown, uneven terrain. By incorporating the robot's past experiences, the system can plan trajectories that are more aware of potential risks and better able to avoid hazardous situations.
However, the paper does not address how the system might handle sudden, unexpected changes in the environment, such as rapidly shifting terrain or the appearance of new obstacles. Additionally, the computational complexity of the history-aware planning algorithm and its impact on real-time performance are not discussed in detail. [This relates to the research presented in <a href="https://aimodels.fyi/papers/arxiv/risk-aware-coverage-path-planning-lunar-micro">Risk-Aware Coverage Path Planning for Lunar Micro-Rovers</a>.]
Further research and testing would be needed to fully understand the capabilities and limitations of this approach, as well as its potential for practical applications in challenging environments.
Conclusion
This paper presents a history-aware planning system for autonomous navigation on unknown, uneven terrain. By incorporating the robot's past experiences, the system can anticipate and avoid potential hazards, enabling safer and more reliable navigation.
The proposed approach could be particularly useful for robots exploring hazardous or unpredictable environments, such as the surface of another planet or disaster zones. However, further research is needed to address potential limitations, such as handling unexpected environmental changes and ensuring real-time performance.
Overall, this work represents an important step towards developing autonomous navigation systems that can operate safely and effectively in complex, unstructured terrains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Bipedal Safe Navigation over Uncertain Rough Terrain: Unifying Terrain Mapping and Locomotion Stability
Kasidit Muenprasitivej, Jesse Jiang, Abdulaziz Shamsah, Samuel Coogan, Ye Zhao
0
0
We study the problem of bipedal robot navigation in complex environments with uncertain and rough terrain. In particular, we consider a scenario in which the robot is expected to reach a desired goal location by traversing an environment with uncertain terrain elevation. Such terrain uncertainties induce not only untraversable regions but also robot motion perturbations. Thus, the problems of terrain mapping and locomotion stability are intertwined. We evaluate three different kernels for Gaussian process (GP) regression to learn the terrain elevation. We also learn the motion deviation resulting from both the terrain as well as the discrepancy between the reduced-order Prismatic Inverted Pendulum Model used for planning and the full-order locomotion dynamics. We propose a hierarchical locomotion-dynamics-aware sampling-based navigation planner. The global navigation planner plans a series of local waypoints to reach the desired goal locations while respecting locomotion stability constraints. Then, a local navigation planner is used to generate a sequence of dynamically feasible footsteps to reach local waypoints. We develop a novel trajectory evaluation metric to minimize motion deviation and maximize information gain of the terrain elevation map. We evaluate the efficacy of our planning framework on Digit bipedal robot simulation in MuJoCo.
4/16/2024

Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
0
0
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
6/19/2024
🧪
A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams
Sarah Swinton, Jan-Hendrik Ewers, Euan McGookin, David Anderson, Douglas Thomson
0
0
One of the fundamental limiting factors in planetary exploration is the autonomous capabilities of planetary exploration rovers. This study proposes a novel methodology for trustworthy autonomous multi-robot teams which incorporates data from multiple sources (HiRISE orbiter imaging, probability distribution maps, and on-board rover sensors) to find efficient exploration routes in Jezero crater. A map is generated, consisting of a 3D terrain model, traversability analysis, and probability distribution map of points of scientific interest. A three-stage mission planner generates an efficient route, which maximises the accumulated probability of identifying points of interest. A 4D RRT* algorithm is used to determine smooth, flat paths, and prioritised planning is used to coordinate a safe set of paths. The above methodology is shown to coordinate safe and efficient rover paths, which ensure the rovers remain within their nominal pitch and roll limits throughout operation.
5/22/2024

Learning-based Traversability Costmap for Autonomous Off-road Navigation
Qiumin Zhu, Zhen Sun, Songpengcheng Xia, Guoqing Liu, Kehui Ma, Ling Pei, Zheng Gong
0
0
Traversability estimation in off-road terrains is an essential procedure for autonomous navigation. However, creating reliable labels for complex interactions between the robot and the surface is still a challenging problem in learning-based costmap generation. To address this, we propose a method that predicts traversability costmaps by leveraging both visual and geometric information of the environment. To quantify the surface properties like roughness and bumpiness, we introduce a novel way of risk-aware labelling with proprioceptive information for network training. We validate our method in costmap prediction and navigation tasks for complex off-road scenarios. Our results demonstrate that our costmap prediction method excels in terms of average accuracy and MSE. The navigation results indicate that using our learned costmaps leads to safer and smoother driving, outperforming previous methods in terms of the highest success rate, lowest normalized trajectory length, lowest time cost, and highest mean stability across two scenarios.
6/13/2024