Thruster-Assisted Incline Walking
2406.13118
0
0

Abstract
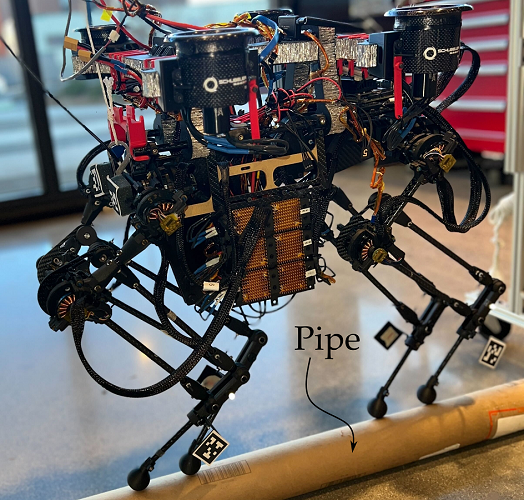
In this study, our aim is to evaluate the effectiveness of thruster-assisted steep slope walking for the Husky Carbon, a quadrupedal robot equipped with custom-designed actuators and plural electric ducted fans, through simulation prior to conducting experimental trials. Thruster-assisted steep slope walking draws inspiration from wing-assisted incline running (WAIR) observed in birds, and intriguingly incorporates posture manipulation and thrust vectoring, a locomotion technique not previously explored in the animal kingdom. Our approach involves developing a reduced-order model of the Husky robot, followed by the application of an optimization-based controller utilizing collocation methods and dynamics interpolation to determine control actions. Through simulation testing, we demonstrate the feasibility of hardware implementation of our controller.
Create account to get full access
Overview
- This paper presents a novel thruster-assisted incline walking system for legged robots.
- The system uses thrusters to assist the robot in climbing inclines, improving its mobility and capability.
- The paper discusses the modeling, design, and evaluation of the thruster-assisted incline walking system.
Plain English Explanation
The paper describes a new way for legged robots to walk up inclines or slopes. Traditional legged robots can have trouble climbing steep hills or ramps, but this system adds small thrusters or jets to the robot to give it an extra boost when going uphill.
The researchers developed a mathematical model to understand how the thrusters interact with the robot's legs and body during incline walking. They then used this model to design the thruster-assisted system, optimizing things like the placement and power of the thrusters.
Through experiments, the researchers showed that the thruster-assisted system significantly improves the robot's ability to climb inclines compared to a regular legged robot. The thrusters provide an additional force to help the robot's legs push it up the slope.
This innovation could be very useful for legged robots operating in real-world environments with uneven terrain, hills, and other challenging surfaces. The thrusters give the robots extra capability to navigate difficult inclines that they may not be able to handle with just their legs alone.
Technical Explanation
The paper presents a thruster-assisted incline walking system for legged robots to improve their mobility on inclined surfaces. The authors develop a dynamic model to capture the interaction between the robot's legs, body, and the added thrusters during incline walking.
Based on this model, the researchers optimized the placement and thrust of the thrusters to maximize the robot's climbing ability. They evaluated the thruster-assisted system through simulations and experiments, comparing its performance to a standard legged robot without thrusters.
The results show that the thruster-assisted system can significantly enhance the robot's incline walking capability. The additional thrust from the thrusters helps the robot's legs propel it up the incline more effectively. This improved mobility could be valuable for legged robots navigating real-world environments with uneven terrain, slopes, and other challenging surfaces.
Critical Analysis
The paper provides a thorough investigation of the thruster-assisted incline walking system, with a well-developed dynamic model and systematic evaluation. However, the authors do note some limitations of the current system.
For example, the thrusters add extra weight and complexity to the robot, which could impact its overall energy efficiency and cost. The authors also suggest that the thruster placement and control strategy may need to be further refined to handle a wider range of incline angles and environmental conditions.
Additionally, the experiments in the paper were conducted on a relatively small-scale robot platform. It would be interesting to see how the thruster-assisted system scales to larger, more complex legged robots that may face even greater challenges with incline walking.
Overall, this research represents an important step in enhancing the mobility of legged robots, but continued development and testing will be needed to fully realize the potential of this approach in real-world applications.
Conclusion
This paper presents a novel thruster-assisted incline walking system for legged robots that significantly improves their ability to navigate sloped surfaces. By integrating thrusters with the robot's legs, the researchers have developed a system that can provide an extra boost of force to help the robot climb inclines.
The technical contributions of this work include the development of a dynamic model to capture the interaction between the robot, its legs, and the thrusters, as well as the optimization of the thruster placement and control. The experimental results demonstrate the effectiveness of the thruster-assisted system compared to a standard legged robot.
Overall, this research represents an important advancement in legged robot mobility, with potential applications in areas such as autonomous locomotion mode transition, optimal gait control, and navigation of challenging terrains. The thruster-assisted approach could help expand the operational capabilities of legged robots in real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
Kaushik Venkatesh Krishnamurthy, Chenghao Wang, Shreyansh Pitroda, Adarsh Salagame, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
0
0
This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.
5/13/2024

Capture Point Control in Thruster-Assisted Bipedal Locomotion
Shreyansh Pitroda, Aditya Bondada, Kaushik Venkatesh Krishnamurthy, Adarsh Salagame, Chenghao Wang, Taoran Liu, Bibek Gupta, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
0
0
Despite major advancements in control design that are robust to unplanned disturbances, bipedal robots are still susceptible to falling over and struggle to negotiate rough terrains. By utilizing thrusters in our bipedal robot, we can perform additional posture manipulation and expand the modes of locomotion to enhance the robot's stability and ability to negotiate rough and difficult-to-navigate terrains. In this paper, we present our efforts in designing a controller based on capture point control for our thruster-assisted walking model named Harpy and explore its control design possibilities. While capture point control based on centroidal models for bipedal systems has been extensively studied, the incorporation of external forces that can influence the dynamics of linear inverted pendulum models, often used in capture point-based works, has not been explored before. The inclusion of these external forces can lead to interesting interpretations of locomotion, such as virtual buoyancy studied in aquatic-legged locomotion. This paper outlines the dynamical model of our robot, the capture point method we use to assist the upper body stabilization, and the simulation work done to show the controller's feasibility.
6/24/2024
Optimal Gait Control for a Tendon-driven Soft Quadruped Robot by Model-based Reinforcement Learning
Xuezhi Niu, Kaige Tan, Lei Feng
0
0
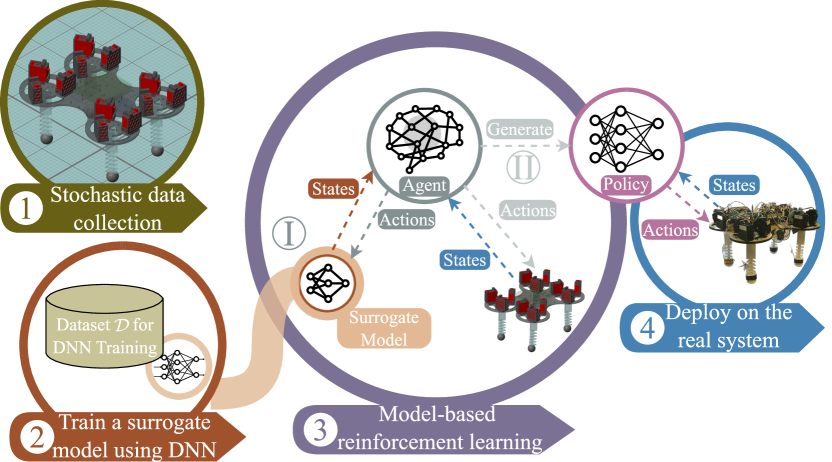
This study presents an innovative approach to optimal gait control for a soft quadruped robot enabled by four Compressible Tendon-driven Soft Actuators (CTSAs). Improving our previous studies of using model-free reinforcement learning for gait control, we employ model-based reinforcement learning (MBRL) to further enhance the performance of the gait controller. Compared to rigid robots, the proposed soft quadruped robot has better safety, less weight, and a simpler mechanism for fabrication and control. However, the primary challenge lies in developing sophisticated control algorithms to attain optimal gait control for fast and stable locomotion. The research employs a multi-stage methodology, including state space restriction, data-driven model training, and reinforcement learning algorithm development. Compared to benchmark methods, the proposed MBRL algorithm, combined with post-training, significantly improves the efficiency and performance of gait control policies. The developed policy is both robust and adaptable to the robot's deformable morphology. The study concludes by highlighting the practical applicability of these findings in real-world scenarios.
6/12/2024
🚀
Autonomous Locomotion Mode Transition in Quadruped Track-Legged Robots: A Simulation-Based Analysis for Step Negotiation
Jie Wang, Krispin Davies
0
0
Hybrid track/wheel-legged robots combine the advantages of wheel-based and leg-based locomotion, granting adaptability across varied terrains through efficient transitions between rolling and walking modes. However, automating these transitions remains a significant challenge. In this paper, we introduce a method designed for autonomous mode transition in a quadruped hybrid robot with a track/wheel-legged configuration, especially during step negotiation. Our approach hinges on a decision-making mechanism that evaluates the energy efficiency of both locomotion modes using a proposed energy-based criterion. To guarantee a smooth negotiation of steps, we incorporate two climbing gaits designated for the assessment of energy usage in walking locomotion. Simulation results validate the method's effectiveness, showing successful autonomous transitions across steps of diverse heights. Our suggested approach has universal applicability and can be modified to suit other hybrid robots of similar mechanical configuration, provided their locomotion energy performance is studied beforehand.
4/4/2024