TopoLogic: An Interpretable Pipeline for Lane Topology Reasoning on Driving Scenes

0
🤷
Sign in to get full access
Overview
- Autonomous driving systems need to understand the topology of lanes in a scene, which is an emerging task that combines perception and reasoning.
- Existing approaches often focus more on perception and directly apply machine learning to learn lane topology from lane detection, which can be influenced by shifts in lane detection.
- The proposed "TopoLogic" method uses geometric distance and semantic similarity to reason about lane topology, mitigating the impact of detection issues.
- TopoLogic significantly outperforms state-of-the-art methods on a benchmark dataset and can be easily integrated into existing models to boost performance.
Plain English Explanation
Autonomous cars need to understand the layout and connectivity of the lanes on the road in order to drive safely and efficiently. This is a complex task that requires both perceiving the lanes in the environment and reasoning about how they are connected and related to each other.
Many existing approaches to this problem focus heavily on the perception aspect - trying to detect and locate the lanes as accurately as possible. They then use machine learning models to directly learn the lane topology (how the lanes are connected) from this lane detection information.
However, this paradigm has a key limitation - it can be heavily influenced by errors or imprecisions in the lane detection process. For example, if the detected endpoints of the lanes are slightly off, it can throw off the reasoning about how they are connected.
To address this, the researchers propose a new method called "TopoLogic" that takes a more holistic approach. It considers both the geometric properties of the lanes (their shape and location) as well as the semantic similarity between them (how they relate to each other conceptually). By integrating these two sources of information, TopoLogic is able to reason about lane topology in a more robust and reliable way that is less sensitive to issues in the perception stage.
Experiments show that TopoLogic significantly outperforms existing state-of-the-art methods on a standard benchmark dataset for this task. Additionally, the geometric reasoning component of TopoLogic can be easily added to existing models to boost their lane topology performance without having to retrain the whole system from scratch.
Technical Explanation
The proposed "TopoLogic" method aims to improve upon existing approaches to lane topology reasoning in autonomous driving scenes. Many existing methods focus primarily on enhancing the perception of lane detection, and then directly apply machine learning models to learn the lane topology from the detected lanes. This paradigm can be influenced by inherent issues with lane detection, such as shifts in the detected endpoints of the lanes.
To address this, TopoLogic takes a two-pronged approach that considers both the geometric and semantic properties of the lanes. First, it calculates the geometric distance between lanes to reason about their topological relationships, mitigating the impact of detection errors. Second, it introduces an explicit calculation of the semantic similarity between lanes based on their visual and contextual features. By integrating the results from both the geometric and semantic spaces, TopoLogic can provide more comprehensive and robust information for reasoning about lane topology.
Experiments on the OpenLane-V2 benchmark show that TopoLogic significantly outperforms existing state-of-the-art methods, achieving a 23.9 vs 10.9 improvement in TOP$_{ll}$ and a 44.1 vs 39.8 improvement in OLS on the subset_A dataset. Importantly, the geometric distance-based topology reasoning component of TopoLogic can be incorporated into well-trained models without the need for full retraining, providing a way to significantly boost the performance of existing lane topology reasoning systems.
Critical Analysis
The TopoLogic approach presents a compelling solution to the challenges of lane topology reasoning in autonomous driving scenes. By integrating both geometric and semantic information, it is able to overcome the limitations of approaches that rely solely on lane detection quality. The significant performance improvements on the OpenLane-V2 benchmark are a strong validation of the efficacy of this approach.
That said, the paper does not delve deeply into potential limitations or caveats of the proposed method. For example, it would be useful to understand how TopoLogic performs in more complex or noisy driving environments, or how it might scale to handle a wider variety of lane configurations. Additionally, the paper does not provide much insight into the computational costs or runtime performance of the approach, which could be important considerations for real-world autonomous driving applications.
Further research could also explore ways to [link to "traffic-scenario-logic-spatial-temporal-logic-modeling"] more tightly integrate the geometric and semantic reasoning components, potentially through the use of [link to "topological-interpretability-deep-learning"] techniques to enhance the interpretability and explainability of the model's decision-making process. Leveraging [link to "graph-attention-network-lane-wise-topology-invariant"] or [link to "characterizing-influence-topology-graph-learning-tasks"] approaches could also be an interesting avenue to pursue.
Overall, the TopoLogic method represents an important step forward in addressing the challenges of lane topology reasoning. While the paper could benefit from a more thorough exploration of potential limitations and avenues for further development, the core ideas and demonstrated performance improvements are highly promising for advancing the state-of-the-art in autonomous driving perception and reasoning.
Conclusion
The TopoLogic method proposed in this paper tackles the critical task of lane topology reasoning in autonomous driving scenes. By considering both the geometric properties and semantic similarities of detected lanes, it is able to reason about lane connectivity in a more robust and reliable way compared to existing approaches that rely primarily on lane detection quality.
The significant performance improvements on the OpenLane-V2 benchmark, as well as the ability to easily integrate the geometric reasoning component into existing models, highlight the practical value and potential impact of this work. As autonomous driving systems continue to advance, techniques like TopoLogic will be essential for enabling safe, efficient, and [link to "lane-segmentation-refinement-diffusion-models"] interpretable navigation in complex road environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤷
0
TopoLogic: An Interpretable Pipeline for Lane Topology Reasoning on Driving Scenes
Yanping Fu, Wenbin Liao, Xinyuan Liu, Hang xu, Yike Ma, Feng Dai, Yucheng Zhang
As an emerging task that integrates perception and reasoning, topology reasoning in autonomous driving scenes has recently garnered widespread attention. However, existing work often emphasizes perception over reasoning: they typically boost reasoning performance by enhancing the perception of lanes and directly adopt MLP to learn lane topology from lane query. This paradigm overlooks the geometric features intrinsic to the lanes themselves and are prone to being influenced by inherent endpoint shifts in lane detection. To tackle this issue, we propose an interpretable method for lane topology reasoning based on lane geometric distance and lane query similarity, named TopoLogic. This method mitigates the impact of endpoint shifts in geometric space, and introduces explicit similarity calculation in semantic space as a complement. By integrating results from both spaces, our methods provides more comprehensive information for lane topology. Ultimately, our approach significantly outperforms the existing state-of-the-art methods on the mainstream benchmark OpenLane-V2 (23.9 v.s. 10.9 in TOP$_{ll}$ and 44.1 v.s. 39.8 in OLS on subset_A. Additionally, our proposed geometric distance topology reasoning method can be incorporated into well-trained models without re-training, significantly boost the performance of lane topology reasoning. The code is released at https://github.com/Franpin/TopoLogic.
Read more5/24/2024

0
Enhancing 3D Lane Detection and Topology Reasoning with 2D Lane Priors
Han Li, Zehao Huang, Zitian Wang, Wenge Rong, Naiyan Wang, Si Liu
3D lane detection and topology reasoning are essential tasks in autonomous driving scenarios, requiring not only detecting the accurate 3D coordinates on lane lines, but also reasoning the relationship between lanes and traffic elements. Current vision-based methods, whether explicitly constructing BEV features or not, all establish the lane anchors/queries in 3D space while ignoring the 2D lane priors. In this study, we propose Topo2D, a novel framework based on Transformer, leveraging 2D lane instances to initialize 3D queries and 3D positional embeddings. Furthermore, we explicitly incorporate 2D lane features into the recognition of topology relationships among lane centerlines and between lane centerlines and traffic elements. Topo2D achieves 44.5% OLS on multi-view topology reasoning benchmark OpenLane-V2 and 62.6% F-Socre on single-view 3D lane detection benchmark OpenLane, exceeding the performance of existing state-of-the-art methods.
Read more6/6/2024
0
RoadPainter: Points Are Ideal Navigators for Topology transformER
Zhongxing Ma, Shuang Liang, Yongkun Wen, Weixin Lu, Guowei Wan
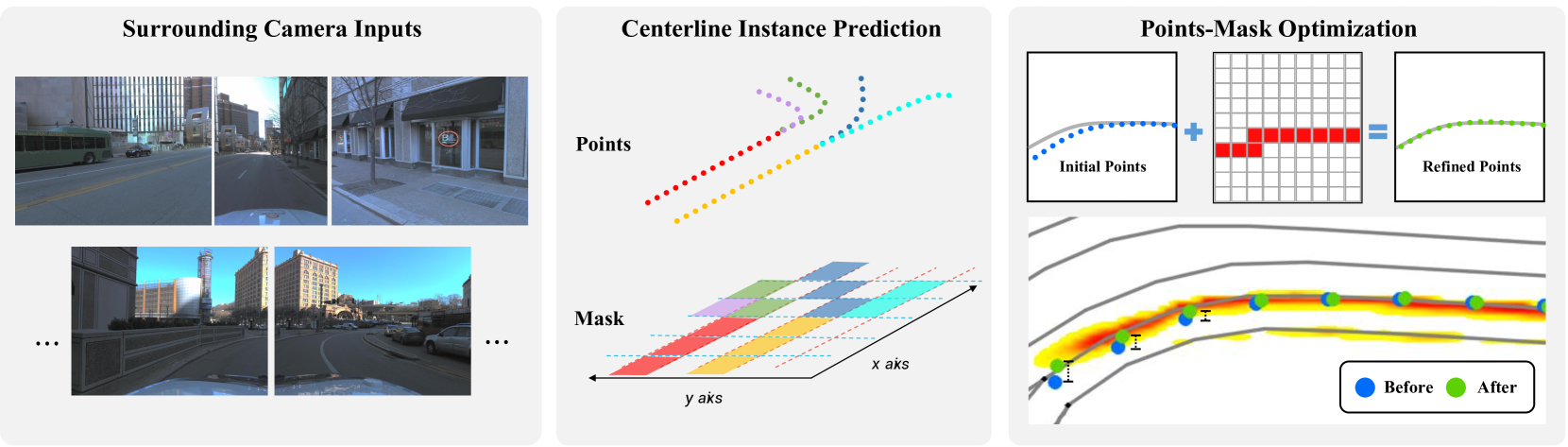
Topology reasoning aims to provide a precise understanding of road scenes, enabling autonomous systems to identify safe and efficient routes. In this paper, we present RoadPainter, an innovative approach for detecting and reasoning the topology of lane centerlines using multi-view images. The core concept behind RoadPainter is to extract a set of points from each centerline mask to improve the accuracy of centerline prediction. We start by implementing a transformer decoder that integrates a hybrid attention mechanism and a real-virtual separation strategy to predict coarse lane centerlines and establish topological associations. Then, we generate centerline instance masks guided by the centerline points from the transformer decoder. Moreover, we derive an additional set of points from each mask and combine them with previously detected centerline points for further refinement. Additionally, we introduce an optional module that incorporates a Standard Definition (SD) map to further optimize centerline detection and enhance topological reasoning performance. Experimental evaluations on the OpenLane-V2 dataset demonstrate the state-of-the-art performance of RoadPainter.
Read more7/23/2024
⛏️
0
Reason2Drive: Towards Interpretable and Chain-based Reasoning for Autonomous Driving
Ming Nie, Renyuan Peng, Chunwei Wang, Xinyue Cai, Jianhua Han, Hang Xu, Li Zhang
Large vision-language models (VLMs) have garnered increasing interest in autonomous driving areas, due to their advanced capabilities in complex reasoning tasks essential for highly autonomous vehicle behavior. Despite their potential, research in autonomous systems is hindered by the lack of datasets with annotated reasoning chains that explain the decision-making processes in driving. To bridge this gap, we present Reason2Drive, a benchmark dataset with over 600K video-text pairs, aimed at facilitating the study of interpretable reasoning in complex driving environments. We distinctly characterize the autonomous driving process as a sequential combination of perception, prediction, and reasoning steps, and the question-answer pairs are automatically collected from a diverse range of open-source outdoor driving datasets, including nuScenes, Waymo and ONCE. Moreover, we introduce a novel aggregated evaluation metric to assess chain-based reasoning performance in autonomous systems, addressing the semantic ambiguities of existing metrics such as BLEU and CIDEr. Based on the proposed benchmark, we conduct experiments to assess various existing VLMs, revealing insights into their reasoning capabilities. Additionally, we develop an efficient approach to empower VLMs to leverage object-level perceptual elements in both feature extraction and prediction, further enhancing their reasoning accuracy. The code and dataset will be released.
Read more7/23/2024