Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation

0
Sign in to get full access
Overview
- This paper presents a novel approach called "Touch2Touch" for cross-modal tactile generation to enable object manipulation.
- The key idea is to learn a mapping between visual and tactile modalities, allowing a robot to generate realistic tactile feedback from visual inputs.
- The proposed method could enable more effective and natural object manipulation in robotics.
Plain English Explanation
The paper introduces a technique called "Touch2Touch" that aims to help robots better understand and interact with objects through the sense of touch. When a robot sees an object, it can be difficult for it to know how that object would feel if the robot were to touch it.
The researchers developed a way for the robot to learn the connection between what an object looks like and how it feels. By analyzing large datasets of information about how objects look and feel, the model can predict what kind of tactile feedback a robot would experience when interacting with a new object it has only seen visually.
This cross-modal tactile generation capability could allow robots to manipulate objects more effectively and naturally, as they would have a better understanding of the object's physical properties before actually touching it. For example, a robot could use this technique to gently pick up a fragile object without applying too much force, or to firmly grasp a heavy object without dropping it.
Overall, the "Touch2Touch" approach represents an important step towards giving robots a more human-like sense of touch, which could lead to significant improvements in their ability to safely and intuitively interact with the physical world.
Technical Explanation
The paper introduces a novel deep learning-based framework called "Touch2Touch" that enables cross-modal tactile generation for robotic object manipulation. The key idea is to learn a mapping between visual and tactile modalities, allowing a robot to generate realistic tactile feedback from visual inputs.
The proposed approach consists of two main components:
- A Vision Encoder that encodes visual observations of objects into a latent tactile representation.
- A Tactile Decoder that generates the corresponding tactile feedback given the latent tactile representation.
The authors train these components end-to-end using a large-scale dataset of paired visual and tactile data collected through human-object interactions. This allows the model to learn the intricate relationships between visual and tactile properties of objects.
During inference, the Vision Encoder takes a visual observation of an object as input and outputs a latent tactile representation. The Tactile Decoder then generates the corresponding tactile feedback, which can be used by the robot to anticipate and adapt its manipulation strategy accordingly.
The authors evaluate the Touch2Touch framework on several object manipulation tasks, demonstrating significant performance improvements over baseline methods that rely on visual information alone. The results suggest that the cross-modal tactile generation capability enabled by this approach can lead to more effective and natural object handling in robotic applications.
Critical Analysis
The paper presents a compelling approach to address the challenge of bridging the gap between visual and tactile modalities for robotic manipulation. The authors demonstrate promising results on several benchmark tasks, highlighting the potential of the Touch2Touch framework.
However, the paper does not discuss some potential limitations or caveats of the proposed method. For instance, the performance of the framework may be dependent on the quality and diversity of the training dataset, which can be difficult to obtain in practice. Additionally, the authors do not explore the generalization capabilities of the model to novel object configurations or unseen object categories.
Furthermore, the paper does not provide a thorough analysis of the internal representations learned by the Vision Encoder and Tactile Decoder components. Understanding the nature of these learned representations could offer valuable insights into the model's decision-making process and help identify areas for further improvement.
Future research could also investigate the integration of the Touch2Touch framework with other robotic perception and control modules, as well as its potential applications in more complex manipulation tasks or real-world robotic systems.
Conclusion
The Touch2Touch paper presents a novel deep learning-based approach for cross-modal tactile generation, enabling robots to leverage visual information to anticipate and adapt their manipulation strategies. By learning the intricate relationships between visual and tactile object properties, the proposed framework can generate realistic tactile feedback from visual inputs, leading to more effective and natural object handling in robotic applications.
While the paper demonstrates promising results, further research is needed to explore the limitations, generalization capabilities, and potential applications of the Touch2Touch framework. Nonetheless, this work represents an important step towards endowing robots with a more human-like sense of touch, which could have far-reaching implications for the field of robotic manipulation and interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation
Samanta Rodriguez, Yiming Dou, Miquel Oller, Andrew Owens, Nima Fazeli
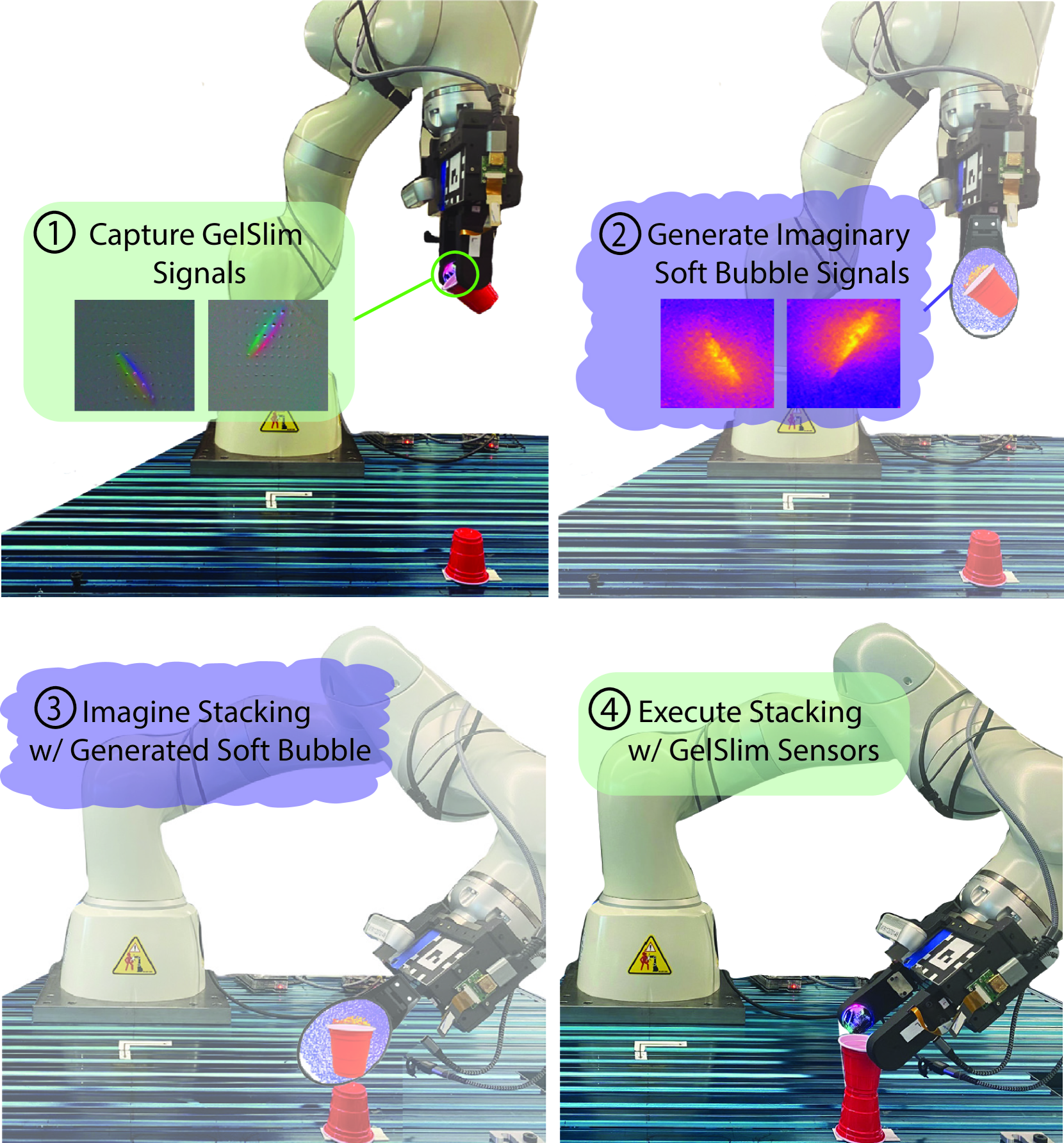
Today's touch sensors come in many shapes and sizes. This has made it challenging to develop general-purpose touch processing methods since models are generally tied to one specific sensor design. We address this problem by performing cross-modal prediction between touch sensors: given the tactile signal from one sensor, we use a generative model to estimate how the same physical contact would be perceived by another sensor. This allows us to apply sensor-specific methods to the generated signal. We implement this idea by training a diffusion model to translate between the popular GelSlim and Soft Bubble sensors. As a downstream task, we perform in-hand object pose estimation using GelSlim sensors while using an algorithm that operates only on Soft Bubble signals. The dataset, the code, and additional details can be found at https://www.mmintlab.com/research/touch2touch/.
Read more9/14/2024

0
TextToucher: Fine-Grained Text-to-Touch Generation
Jiahang Tu, Hao Fu, Fengyu Yang, Hanbin Zhao, Chao Zhang, Hui Qian
Tactile sensation plays a crucial role in the development of multi-modal large models and embodied intelligence. To collect tactile data with minimal cost as possible, a series of studies have attempted to generate tactile images by vision-to-touch image translation. However, compared to text modality, visual modality-driven tactile generation cannot accurately depict human tactile sensation. In this work, we analyze the characteristics of tactile images in detail from two granularities: object-level (tactile texture, tactile shape), and sensor-level (gel status). We model these granularities of information through text descriptions and propose a fine-grained Text-to-Touch generation method (TextToucher) to generate high-quality tactile samples. Specifically, we introduce a multimodal large language model to build the text sentences about object-level tactile information and employ a set of learnable text prompts to represent the sensor-level tactile information. To better guide the tactile generation process with the built text information, we fuse the dual grains of text information and explore various dual-grain text conditioning methods within the diffusion transformer architecture. Furthermore, we propose a Contrastive Text-Touch Pre-training (CTTP) metric to precisely evaluate the quality of text-driven generated tactile data. Extensive experiments demonstrate the superiority of our TextToucher method. The source codes will be available at url{https://github.com/TtuHamg/TextToucher}.
Read more9/10/2024
🏅
0
Imagine2touch: Predictive Tactile Sensing for Robotic Manipulation using Efficient Low-Dimensional Signals
Abdallah Ayad, Adrian Rofer, Nick Heppert, Abhinav Valada
Humans seemingly incorporate potential touch signals in their perception. Our goal is to equip robots with a similar capability, which we term Imagine2touch. Imagine2touch aims to predict the expected touch signal based on a visual patch representing the area to be touched. We use ReSkin, an inexpensive and compact touch sensor to collect the required dataset through random touching of five basic geometric shapes, and one tool. We train Imagine2touch on two out of those shapes and validate it on the ood. tool. We demonstrate the efficacy of Imagine2touch through its application to the downstream task of object recognition. In this task, we evaluate Imagine2touch performance in two experiments, together comprising 5 out of training distribution objects. Imagine2touch achieves an object recognition accuracy of 58% after ten touches per object, surpassing a proprioception baseline.
Read more5/3/2024
🌿
0
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu, Yunhai Han, Qixian Wang, Vaibhav Saxena, Danfei Xu, Ye Zhao
Tactile sensing is critical to fine-grained, contact-rich manipulation tasks, such as insertion and assembly. Prior research has shown the possibility of learning tactile-guided policy from teleoperated demonstration data. However, to provide the demonstration, human users often rely on visual feedback to control the robot. This creates a gap between the sensing modality used for controlling the robot (visual) and the modality of interest (tactile). To bridge this gap, we introduce MimicTouch, a novel framework for learning policies directly from demonstrations provided by human users with their hands. The key innovations are i) a human tactile data collection system which collects multi-modal tactile dataset for learning human's tactile-guided control strategy, ii) an imitation learning-based framework for learning human's tactile-guided control strategy through such data, and iii) an online residual RL framework to bridge the embodiment gap between the human hand and the robot gripper. Through comprehensive experiments, we highlight the efficacy of utilizing human's tactile-guided control strategy to resolve contact-rich manipulation tasks. The project website is at https://sites.google.com/view/MimicTouch.
Read more9/6/2024