Imagine2touch: Predictive Tactile Sensing for Robotic Manipulation using Efficient Low-Dimensional Signals

0
🏅
Sign in to get full access
Overview
- Humans can incorporate potential touch signals into their perception
- The goal is to equip robots with a similar capability, termed "Imagine2touch"
- Imagine2touch aims to predict the expected touch signal based on a visual patch of the area to be touched
- The researchers use an inexpensive touch sensor called ReSkin to collect a dataset through random touching of geometric shapes and a tool
- They train Imagine2touch on two of the shapes and validate it on the unseen tool
- Imagine2touch is demonstrated to be effective for the task of object recognition, surpassing a proprioception baseline
Plain English Explanation
Humans have a remarkable ability to perceive and incorporate potential touch signals into their understanding of the world around them. Researchers want to give robots a similar capability, which they call "Imagine2touch."
The idea behind Imagine2touch is to allow robots to predict what a touch signal would be, based on what they can see. The researchers used a simple touch sensor called ReSkin to collect data on how different shapes and objects "feel" when touched. They had the sensor randomly touch a few basic geometric shapes and a tool, and recorded the touch signals.
Using this data, the researchers trained an AI system called Imagine2touch to learn the relationship between what the robot sees and what it would feel if it touched that area. They tested Imagine2touch on a shape it hadn't seen before, and found it could still predict the touch signal accurately.
The researchers then showed that Imagine2touch can be useful for helping a robot recognize objects. By combining its ability to predict touch with what it can see, Imagine2touch was able to identify objects with 58% accuracy after just 10 touches - better than a system that only relied on the robot's sense of position (proprioception).
Technical Explanation
The researchers used the ReSkin touch sensor to collect a dataset of touch signals from randomly touching five basic geometric shapes and one tool. They trained their Imagine2touch model on two of the shapes and validated it on the unseen tool.
The core idea behind Imagine2touch is to learn the mapping between a visual patch representing an area and the expected touch signal for that area. This allows the model to "imagine" the touch signal without physically touching the object, which the researchers hypothesize is similar to how humans can anticipate tactile sensations.
To demonstrate the efficacy of Imagine2touch, the researchers applied it to the task of object recognition. They conducted two experiments, testing Imagine2touch on a total of 5 objects that were out of the training distribution. Imagine2touch achieved an object recognition accuracy of 58% after just 10 touches per object, surpassing a proprioception-only baseline.
This work builds on prior research in sensorized soft robotic hands and learning tactile insertion skills, demonstrating how visuo-tactile learning can enhance robotic perception and manipulation capabilities.
Critical Analysis
The paper provides a promising approach for equipping robots with more human-like touch perception, but there are a few limitations and areas for further exploration:
- The dataset is relatively small, with only 6 objects total. Expanding the dataset to include a wider variety of shapes, textures, and objects would help test the generalizability of Imagine2touch.
- The object recognition experiments were limited to a small set of objects. Evaluating Imagine2touch on a larger, more diverse set of objects would give a better sense of its real-world performance.
- The paper does not address how Imagine2touch would handle dynamic or deformable objects, which are common in real-world environments. Extending the approach to these more complex scenarios is an important area for future research.
Additionally, while the results are encouraging, the 58% object recognition accuracy after 10 touches suggests there is still room for improvement. Exploring more advanced neural network architectures or training techniques could potentially boost the performance of Imagine2touch further.
Overall, this work represents an important step towards endowing robots with more human-like touch perception, but continued research and refinement will be necessary to realize the full potential of this approach.
Conclusion
The Imagine2touch system developed in this paper demonstrates a promising approach for equipping robots with the ability to anticipate touch signals based on visual information. By learning the relationship between visual cues and expected tactile sensations, Imagine2touch was able to outperform a proprioception-only baseline on an object recognition task.
This research builds on prior work in areas like sensorized soft robotic hands and learning tactile insertion skills, showing how visuo-tactile learning can enhance robotic perception and manipulation capabilities.
While the current results are encouraging, there remains room for improvement and expansion of the Imagine2touch approach. Increasing the dataset size, evaluating on a wider range of objects, and addressing more complex scenarios like dynamic or deformable objects are all important areas for future research. By continuing to develop these human-inspired touch perception capabilities, robots may one day be able to interact with the world in ways that are more natural and intuitive for people.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
0
Imagine2touch: Predictive Tactile Sensing for Robotic Manipulation using Efficient Low-Dimensional Signals
Abdallah Ayad, Adrian Rofer, Nick Heppert, Abhinav Valada
Humans seemingly incorporate potential touch signals in their perception. Our goal is to equip robots with a similar capability, which we term Imagine2touch. Imagine2touch aims to predict the expected touch signal based on a visual patch representing the area to be touched. We use ReSkin, an inexpensive and compact touch sensor to collect the required dataset through random touching of five basic geometric shapes, and one tool. We train Imagine2touch on two out of those shapes and validate it on the ood. tool. We demonstrate the efficacy of Imagine2touch through its application to the downstream task of object recognition. In this task, we evaluate Imagine2touch performance in two experiments, together comprising 5 out of training distribution objects. Imagine2touch achieves an object recognition accuracy of 58% after ten touches per object, surpassing a proprioception baseline.
Read more5/3/2024
0
Touch2Touch: Cross-Modal Tactile Generation for Object Manipulation
Samanta Rodriguez, Yiming Dou, Miquel Oller, Andrew Owens, Nima Fazeli
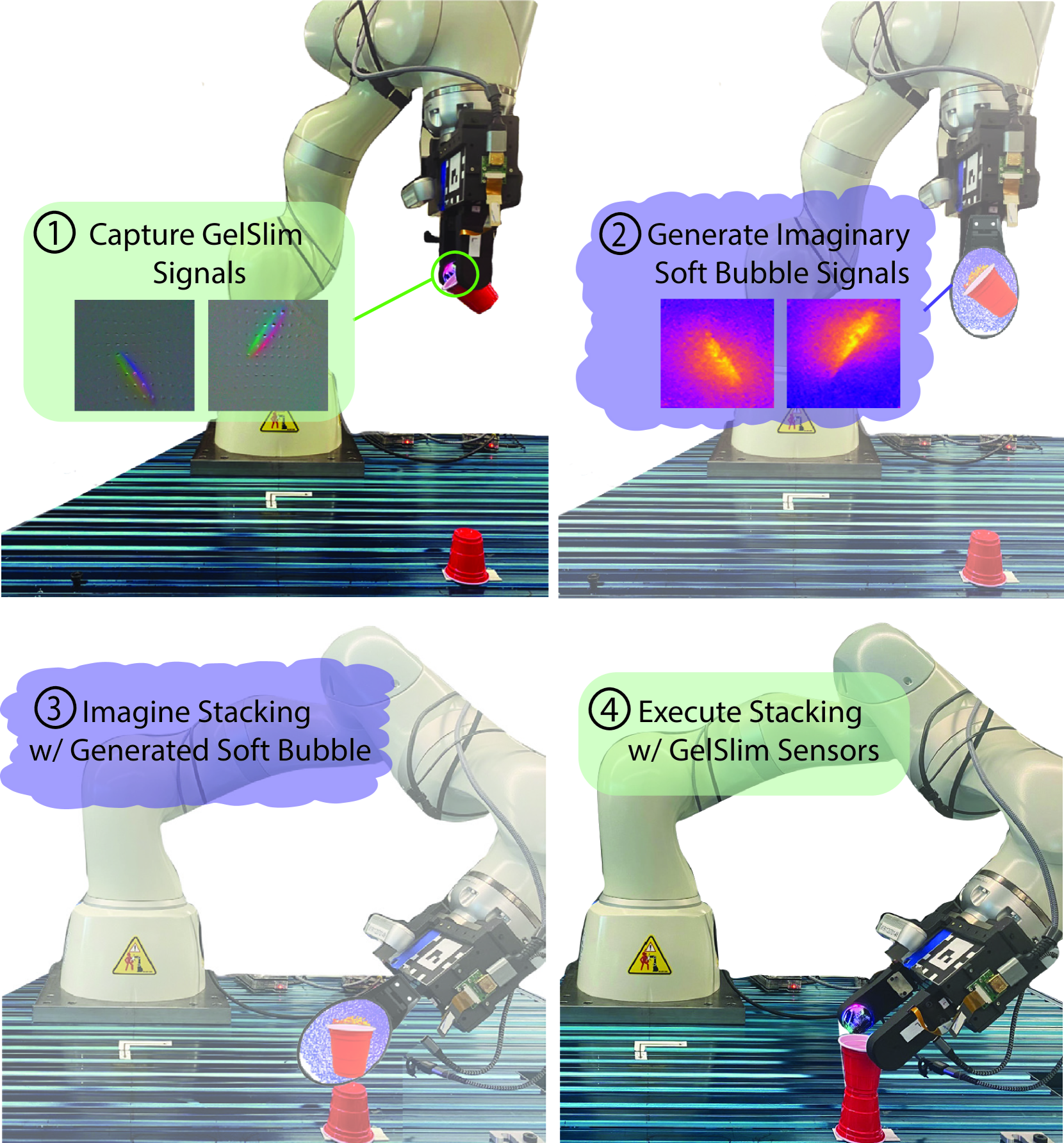
Today's touch sensors come in many shapes and sizes. This has made it challenging to develop general-purpose touch processing methods since models are generally tied to one specific sensor design. We address this problem by performing cross-modal prediction between touch sensors: given the tactile signal from one sensor, we use a generative model to estimate how the same physical contact would be perceived by another sensor. This allows us to apply sensor-specific methods to the generated signal. We implement this idea by training a diffusion model to translate between the popular GelSlim and Soft Bubble sensors. As a downstream task, we perform in-hand object pose estimation using GelSlim sensors while using an algorithm that operates only on Soft Bubble signals. The dataset, the code, and additional details can be found at https://www.mmintlab.com/research/touch2touch/.
Read more9/14/2024

0
Robot Synesthesia: In-Hand Manipulation with Visuotactile Sensing
Ying Yuan, Haichuan Che, Yuzhe Qin, Binghao Huang, Zhao-Heng Yin, Kang-Won Lee, Yi Wu, Soo-Chul Lim, Xiaolong Wang
Executing contact-rich manipulation tasks necessitates the fusion of tactile and visual feedback. However, the distinct nature of these modalities poses significant challenges. In this paper, we introduce a system that leverages visual and tactile sensory inputs to enable dexterous in-hand manipulation. Specifically, we propose Robot Synesthesia, a novel point cloud-based tactile representation inspired by human tactile-visual synesthesia. This approach allows for the simultaneous and seamless integration of both sensory inputs, offering richer spatial information and facilitating better reasoning about robot actions. The method, trained in a simulated environment and then deployed to a real robot, is applicable to various in-hand object rotation tasks. Comprehensive ablations are performed on how the integration of vision and touch can improve reinforcement learning and Sim2Real performance. Our project page is available at https://yingyuan0414.github.io/visuotactile/ .
Read more8/1/2024
🌿
0
MimicTouch: Leveraging Multi-modal Human Tactile Demonstrations for Contact-rich Manipulation
Kelin Yu, Yunhai Han, Qixian Wang, Vaibhav Saxena, Danfei Xu, Ye Zhao
Tactile sensing is critical to fine-grained, contact-rich manipulation tasks, such as insertion and assembly. Prior research has shown the possibility of learning tactile-guided policy from teleoperated demonstration data. However, to provide the demonstration, human users often rely on visual feedback to control the robot. This creates a gap between the sensing modality used for controlling the robot (visual) and the modality of interest (tactile). To bridge this gap, we introduce MimicTouch, a novel framework for learning policies directly from demonstrations provided by human users with their hands. The key innovations are i) a human tactile data collection system which collects multi-modal tactile dataset for learning human's tactile-guided control strategy, ii) an imitation learning-based framework for learning human's tactile-guided control strategy through such data, and iii) an online residual RL framework to bridge the embodiment gap between the human hand and the robot gripper. Through comprehensive experiments, we highlight the efficacy of utilizing human's tactile-guided control strategy to resolve contact-rich manipulation tasks. The project website is at https://sites.google.com/view/MimicTouch.
Read more9/6/2024