Toward Control of Wheeled Humanoid Robots with Unknown Payloads: Equilibrium Point Estimation via Real-to-Sim Adaptation

0

Sign in to get full access
Overview
- This paper explores a real-to-simulation adaptation technique to control a wheeled-humanoid robot with unknown dynamics.
- The approach uses high-fidelity simulation to bridge the gap between the simulated and real-world robot performance.
- The authors demonstrate their method on a wheeled-humanoid robot and show improved control performance compared to existing techniques.
Plain English Explanation
The researchers in this study wanted to find a way to control a robot in the real world, even when the exact details of how the robot moves and functions (its "dynamics") are unknown. To do this, they used a detailed computer simulation of the robot to first learn how to control it in the simulated environment.
By carefully adjusting the simulation to match the real-world robot as closely as possible, the researchers were able to then take the control strategies developed in simulation and apply them successfully to the actual robot. This allowed the robot to be controlled effectively without needing to fully understand its underlying dynamics.
The key innovation was using this "real-to-simulation adaptation" approach, which bridges the gap between the simulated and real-world performance of the robot. The researchers demonstrated their method on a wheeled-humanoid robot, showing improved control compared to previous techniques.
Technical Explanation
The paper presents a real-to-simulation adaptation technique to control a wheeled-humanoid robot with unknown dynamics. The core idea is to use high-fidelity simulation to bridge the gap between simulated and real-world robot performance.
The authors first develop a detailed simulation model of the wheeled-humanoid robot. They then use this simulation to learn control policies that can effectively operate the robot, without requiring full knowledge of the robot's true dynamic parameters.
By carefully calibrating the simulation to match the real-world robot as closely as possible, the control policies learned in simulation can then be successfully applied to the actual robot. This "real-to-simulation adaptation" approach allows the robot to be controlled effectively, even when its underlying dynamics are not fully known.
The authors demonstrate their method on a wheeled-humanoid robot platform and show improved control performance compared to existing techniques that do not leverage simulation-based training.
Critical Analysis
The paper presents a novel and promising approach for controlling robots with unknown dynamics. By using high-fidelity simulation to bridge the gap between the simulated and real-world environments, the authors are able to develop effective control policies without requiring a complete model of the robot's dynamics.
One potential limitation is the challenge of perfectly calibrating the simulation to match the real-world robot. Small discrepancies in the simulation could lead to control policies that do not transfer as effectively to the physical system. The authors acknowledge this and note the need for continued refinement of the simulation-to-reality mapping.
Additionally, the paper focuses on a wheeled-humanoid robot, which has a relatively simple dynamics compared to more complex robotic systems. Further research would be needed to understand how well this approach generalizes to a wider range of robot morphologies and tasks.
Overall, the paper makes an important contribution by demonstrating the potential of real-to-simulation adaptation techniques for robot control. With continued development, this could lead to more robust and capable robotic systems that can operate effectively even with limited knowledge of their own dynamics.
Conclusion
This paper presents a novel real-to-simulation adaptation technique for controlling a wheeled-humanoid robot with unknown dynamics. By using high-fidelity simulation to bridge the gap between the simulated and real-world environments, the authors are able to develop effective control policies without requiring a complete model of the robot's dynamics.
The authors demonstrate their approach on a wheeled-humanoid robot platform and show improved control performance compared to existing techniques. While the method has some limitations, it represents an important step forward in enabling robotic systems to operate effectively in the real world, even with imperfect knowledge of their underlying dynamics.
Overall, this research highlights the potential of simulation-based techniques to advance the field of robotics and lead to more capable and adaptable robotic systems. As the technology continues to evolve, we may see these methods applied to an increasingly wide range of robotic applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Toward Control of Wheeled Humanoid Robots with Unknown Payloads: Equilibrium Point Estimation via Real-to-Sim Adaptation
Donghoon Baek, Youngwoo Sim, Amartya Purushottam, Saurabh Gupta, Joao Ramos
Model-based controllers using a linearized model around the system's equilibrium point is a common approach in the control of a wheeled humanoid due to their less computational load and ease of stability analysis. However, controlling a wheeled humanoid robot while it lifts an unknown object presents significant challenges, primarily due to the lack of knowledge in object dynamics. This paper presents a framework designed for predicting the new equilibrium point explicitly to control a wheeled-legged robot with unknown dynamics. We estimated the total mass and center of mass of the system from its response to initially unknown dynamics, then calculated the new equilibrium point accordingly. To avoid using additional sensors (e.g., force torque sensor) and reduce the effort of obtaining expensive real data, a data-driven approach is utilized with a novel real-to-sim adaptation. A more accurate nonlinear dynamics model, offering a closer representation of real-world physics, is injected into a rigid-body simulation for real-to-sim adaptation. The nonlinear dynamics model parameters were optimized using Particle Swarm Optimization. The efficacy of this framework was validated on a physical wheeled inverted pendulum, a simplified model of a wheeled-legged robot. The experimental results indicate that employing a more precise analytical model with optimized parameters significantly reduces the gap between simulation and reality, thus improving the efficiency of a model-based controller in controlling a wheeled robot with unknown dynamics
Read more8/22/2024
🚀
0
Online Learning-Based Inertial Parameter Identification of Unknown Object for Model-Based Control of Wheeled Humanoids
Donghoon Baek, Bo Peng, Saurabh Gupta, Joao Ramos
Identifying the dynamic properties of manipulated objects is essential for safe and accurate robot control. Most methods rely on low noise force torque sensors, long exciting signals, and solving nonlinear optimization problems, making the estimation process slow. In this work, we propose a fast, online learning based inertial parameter estimation framework that enhances model based control. We aim to quickly and accurately estimate the parameters of an unknown object using only the robot's proprioception through end to end learning, which is applicable for real-time system. To effectively capture features in robot proprioception affected by object dynamics and address the challenge of obtaining ground truth inertial parameters in the real world, we developed a high fidelity simulation that uses more accurate robot dynamics through real-to-sim adaptation. Since our adaptation focuses solely on the robot, task-relevant data (e.g., holding an object) is not required from the real world, simplifying the data collection process. Moreover, we address both parametric and non-parametric modeling errors independently using Robot System Identification and Gaussian Processes. We validate our estimator to assess how quickly and accurately it can estimate physically feasible parameters of an manipulated object given a specific trajectory obtained from a wheeled humanoid robot. Our estimator achieves faster estimation speeds (around 0.1 seconds) while maintaining accuracy comparable to other methods. Additionally, our estimator further highlight its benefits in improving the performance of model based control by compensating object's dynamics and reinitializing new equilibrium point of wheeled humanoid
Read more8/22/2024

0
Adaptive Robust Controller for handling Unknown Uncertainty of Robotic Manipulators
Mohamed Abdelwahab, Giulio Giacomuzzo, Alberto Dalla Libera, Ruggero Carli
The ability to achieve precise and smooth trajectory tracking is crucial for ensuring the successful execution of various tasks involving robotic manipulators. State-of-the-art techniques require accurate mathematical models of the robot dynamics, and robustness to model uncertainties is achieved by relying on precise bounds on the model mismatch. In this paper, we propose a novel adaptive robust feedback linearization scheme able to compensate for model uncertainties without any a-priori knowledge on them, and we provide a theoretical proof of convergence under mild assumptions. We evaluate the method on a simulated RR robot. First, we consider a nominal model with known model mismatch, which allows us to compare our strategy with state-of-the-art uncertainty-aware methods. Second, we implement the proposed control law in combination with a learned model, for which uncertainty bounds are not available. Results show that our method leads to performance comparable to uncertainty-aware methods while requiring less prior knowledge.
Read more6/21/2024
0
New!Efficient Computation of Whole-Body Control Utilizing Simplified Whole-Body Dynamics via Centroidal Dynamics
Junewhee Ahn, Jaesug Jung, Yisoo Lee, Hokyun Lee, Sami Haddadin, Jaeheung Park
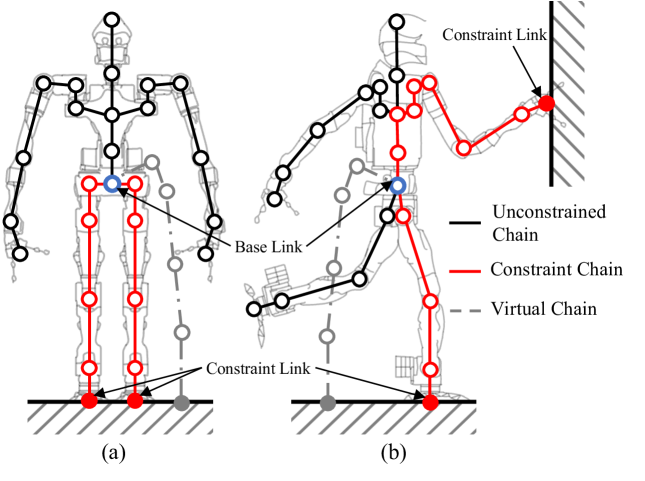
In this study, we present a novel method for enhancing the computational efficiency of whole-body control for humanoid robots, a challenge accentuated by their high degrees of freedom. The reduced-dimension rigid body dynamics of a floating base robot is constructed by segmenting its kinematic chain into constrained and unconstrained chains, simplifying the dynamics of the unconstrained chain through the centroidal dynamics. The proposed dynamics model is possible to be applied to whole-body control methods, allowing the problem to be divided into two parts for more efficient computation. The efficiency of the framework is demonstrated by comparative experiments in simulations. The calculation results demonstrate a significant reduction in processing time, highlighting an improvement over the times reported in current methodologies. Additionally, the results also shows the computational efficiency increases as the degrees of freedom of robot model increases.
Read more9/18/2024